TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121088
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016300
出願日
2024-02-06
発明の名称
情報処理方法及び車両制御装置
出願人
日産自動車株式会社
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20250812BHJP(信号)
要約
【課題】自車両と特定車両との間の後続車両に不要な追越動作を引き起こしてしまうことなく、自車両に退避動作を行なわせる。
【解決手段】本実施形態に係る車両制御装置は、自車両と特定車両との距離が、自車両から、「後続車両が、特定車両の接近を認識すると想定される特定車両の位置」までの距離以下であると判定すると、後続車両による退避動作を検知した後に、自車両に退避動作を行なわせる。
【選択図】図4
特許請求の範囲
【請求項1】
特定走行を行なう特定車両の走行を妨げないように自車両を制御する処理をプロセッサに実行させる情報処理方法であって、
前記プロセッサは、
前記自車両と前記特定車両との距離である特定車両距離が、
前記自車両から、
前記自車両と前記特定車両との間の後続車両が、前記特定車両の接近を認識すると想定される、前記特定車両の位置まで
の距離である基準距離以下であるかを判定し、
前記特定車両距離が前記基準距離以下であると判定すると、前記後続車両による退避動作を検知した後に、前記自車両に前記退避動作を行なわせる、
情報処理方法。
続きを表示(約 1,100 文字)
【請求項2】
前記プロセッサは、前記特定車両距離が、前記自車両が前記特定車両の走行を妨げない距離として予め設定された距離のうち、最も短い距離である退避最短距離以下であると、前記自車両に前記退避動作を行なわせる、
請求項1に記載の情報処理方法。
【請求項3】
前記プロセッサは、前記自車両と前記特定車両との間に複数台の後続車両があると、
前記自車両から、
前記複数台の後続車両のうち前記自車両に最も近い後続車両が、前記特定車両の接近を認識すると想定される、前記特定車両の位置まで
の距離を、前記基準距離とし、
前記特定車両距離が前記基準距離以下であると判定すると、前記自車両に最も近い後続車両による前記退避動作を検知した後に、前記自車両に前記退避動作を行なわせる、
請求項1または2に記載の情報処理方法。
【請求項4】
前記プロセッサは、前記特定車両が発信する信号から特定された前記特定車両の位置を用いて、前記特定車両距離を推定する、
請求項1または2に記載の情報処理方法。
【請求項5】
前記プロセッサは、前記自車両と前記特定車両との間に複数台の後続車両があると、
前記複数台の後続車両のうち、前記自車両に最も近い後続車両以外の後続車両の何れかが、前記退避動作を行なった位置から、前記特定車両距離を推定する、
請求項1または2に記載の情報処理方法。
【請求項6】
前記プロセッサは、前記自車両が走行している道路の道幅を考慮して、前記自車両が前記退避動作を行なう位置を決定する、
請求項1または2に記載の情報処理方法。
【請求項7】
前記プロセッサは、前記自車両が交差点内で停車しないように、前記自車両に前記退避動作を行なわせる、
請求項1または2に記載の情報処理方法。
【請求項8】
特定走行を行なう特定車両の走行を妨げないように自車両を制御する車両制御装置であって、
前記自車両と前記特定車両との距離である特定車両距離が、
前記自車両から、
前記自車両と前記特定車両との間の後続車両が、前記特定車両の接近を認識すると想定される、前記特定車両の位置まで
の距離である基準距離以下であるかを判定する判定部と、
前記判定部により前記特定車両距離が前記基準距離以下であると判定されると、前記後続車両による退避動作を検知した後に、前記自車両に前記退避動作を行なわせる、実行部と、
を備える、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理方法及び車両制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
(赤色の)警光灯を点灯させたり、サイレンを鳴らしたりするなどの特定走行を行なう、消防車、救急車、パトカー、応急作業用自動車等の特定車両が近づいてきた場合、一般車両は道路の左側に寄って徐行、一時停止等の退避動作を行なう必要がある。そこで、従来、係る特定車両が接近した場合に、車両に自動的に退避動作を行なわせる技術が提案されている。例えば、下掲の特許文献1には、自車両の周囲の特定車両の音声を認識し、認識された特定車両から生じる音声の特徴量が基準を満たす場合、特定車両の走行を妨げないように自車両を回避させる回避動作を行なわせる、車両制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-156144号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本件発明者は、上述の従来技術には、自車両と特定車両との間に後続車両が存在する場合に、自車両が退避動作を行なうタイミングによっては、係る後続車両に、不要な追越動作を引き起こしてしまうとの問題があることを見出した。
【0005】
本発明の目的は、自車両と特定車両との間の後続車両に不要な追越動作を引き起こしてしまうことなく、自車両に退避動作を行なわせる情報処理方法及び車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決するために、本発明の一態様に係る情報処理方法は、特定走行を行なう特定車両の走行を妨げないように自車両を制御する処理をプロセッサに実行させる情報処理方法であって、前記プロセッサは、前記自車両と前記特定車両との距離である特定車両距離が、前記自車両から、前記自車両と前記特定車両との間の後続車両が、前記特定車両の接近を認識すると想定される、前記特定車両の位置までの距離である基準距離以下であるかを判定し、前記特定車両距離が前記基準距離以下であると判定すると、前記後続車両による退避動作を検知した後に、前記自車両に前記退避動作を行なわせる。
【発明の効果】
【0007】
本発明によれば、自車両と特定車両との間の後続車両に不要な追越動作を引き起こしてしまうことなく、自車両に退避動作を行なわせる情報処理方法及び車両制御装置を提供することができる。
【図面の簡単な説明】
【0008】
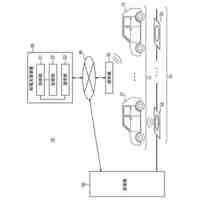
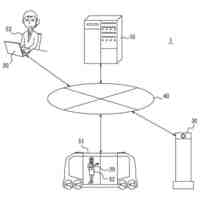
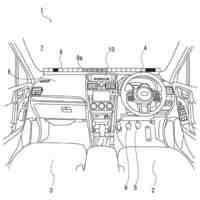
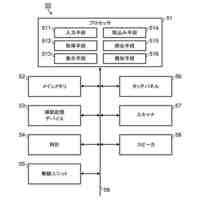
実施形態に係る車両制御装置を備える車両の概略構成を表すブロック図である。
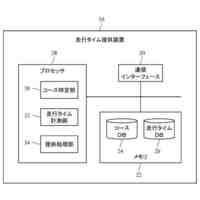
実施の形態に係る車両制御装置のハードウェア構成の一例を模式的に例示する。
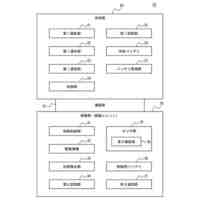
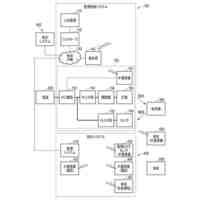
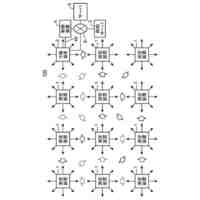
実施の形態に係る車両制御装置のソフトウェア構成の一例を模式的に例示する。
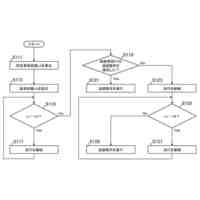
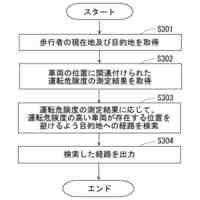
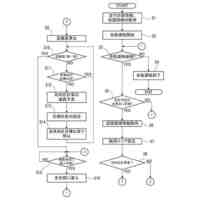
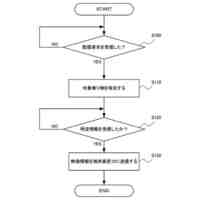
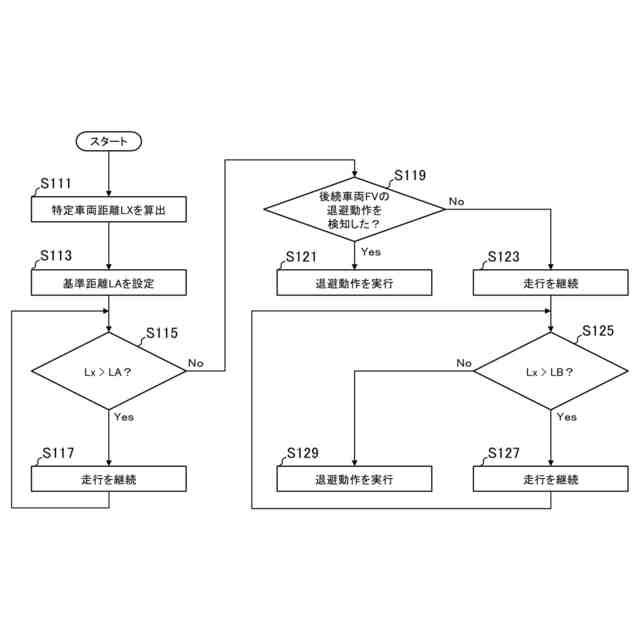
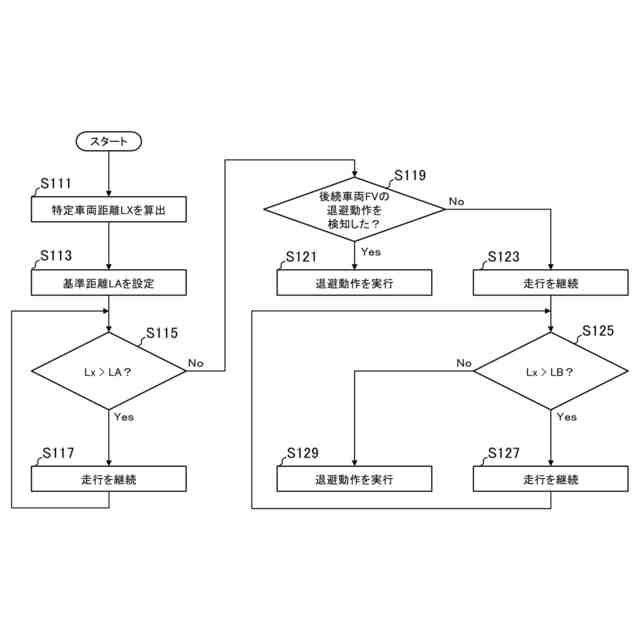
実施の形態に係る車両制御装置の処理手順の一例を例示する。
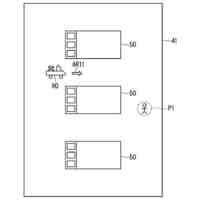
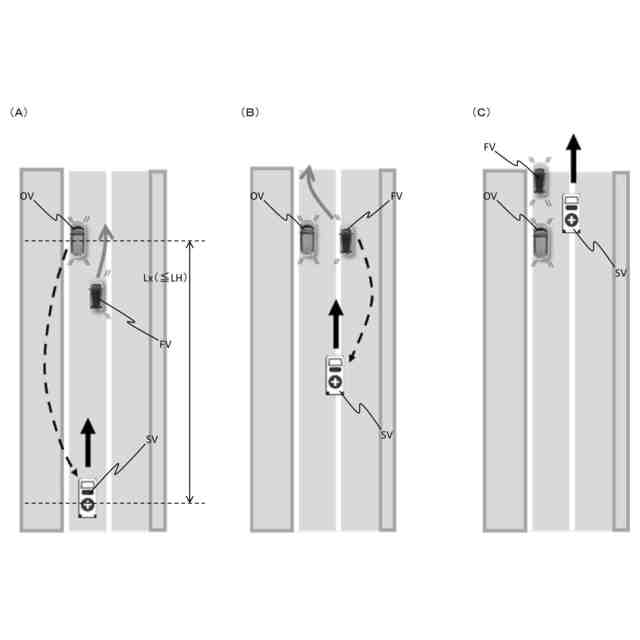
図1の車両が行なう退避動作のタイミング等の一例を例示する。
本実施形態に係る車両制御装置により実現される効果を説明する。
自車両が従来のタイミングで退避動作を行なうことで、後続車両に不要な追越動作を引き起こしてしまう状況を例示する。
【発明を実施するための形態】
【0009】
以下、本発明の一側面に係る実施の形態(以下、「本実施形態」とも表記する)を、図面に基づいて説明する。ただし、以下で説明する本実施形態は、あらゆる点において本発明の例示に過ぎない。本発明の範囲を逸脱することなく種々の改良や変形を行なうことができることは言うまでもない。つまり、本発明の実施にあたって、実施形態に応じた具体的構成が適宜採用されてもよい。なお、本実施形態において登場するデータを自然言語により説明しているが、より具体的には、コンピュータが認識可能な疑似言語、コマンド、パラメータ、マシン語等で指定される。
【0010】
§1 適用例
本実施形態においては、自車両OVの後(自車両OVからみて後方)を走行する車両のうち、「特定走行を行なう特定車両SV」以外の車両を、「後続車両FV」と称する。後続車両FVは、例えば、自車両OVが走行する車線(以下、「自車線」とも称する)において、自車両OVの後を走行する、特定車両SV以外の車両である。「特定車両SV」とは、例えば、消防車、救急車、パトカー、応急作業用自動車などである。また、「特定走行」とは、(赤色の)警光灯を点灯させたり、サイレンを鳴らしたりしながら走行することである。「特定走行を行なう特定車両SV」とは、例えば、緊急用務のためにサイレンを鳴らし赤色回転灯を回しながら現場に急行する緊急車両である。「特定走行を行なう特定車両SV」について、以下では単に「特定車両SV」と略記することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
物体検出装置
4日前
古野電気株式会社
航路計画システム及び航路計画方法
9日前
トヨタ自動車株式会社
路側装置
2日前
ホーチキ株式会社
防災システム及び操作装置
2日前
井関農機株式会社
作業車両
9日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
運転支援装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
9日前
トヨタ自動車株式会社
給電支援装置
9日前
トヨタ自動車株式会社
運転支援装置
3日前
日産自動車株式会社
情報処理方法及び車両制御装置
5日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
車両位置推定装置
6日前
トヨタ自動車株式会社
路側装置およびシステム
4日前
三菱ロジスネクスト株式会社
防衛システム
4日前
株式会社SUBARU
情報提示装置
4日前
日本電気株式会社
支援システム、処理方法、およびプログラム
4日前
日伸貿易株式会社
室内状況確認システム
3日前
トヨタ自動車株式会社
走行タイム提供装置
2日前
能美防災株式会社
表示灯
4日前
トヨタ自動車株式会社
制御装置、方法及びプログラム
4日前
株式会社東芝
通信装置、通信方法及びプログラム
2日前
トヨタ自動車株式会社
車線推定装置
9日前
トヨタ自動車株式会社
制御装置、及び制御装置の動作方法
4日前
トヨタ自動車株式会社
制御装置、及び制御装置の動作方法
4日前
東芝テック株式会社
商品照合装置及びそのプログラム
4日前
トヨタ紡織株式会社
燃料供給システム及び燃料供給方法
9日前
パイオニア株式会社
情報処理装置
9日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
2日前
古野電気株式会社
航行支援システム、航行支援方法、及びプログラム
9日前
東芝テック株式会社
持出監視システムおよびプログラム
3日前
日産自動車株式会社
車両制御方法、及び車両制御装置
2日前
株式会社ミヤワキ
通信システム、制御装置及び通信方法
2日前
株式会社SCREENホールディングス
作業支援方法および作業支援システム
9日前
株式会社デンソーテン
運転支援装置、および、プログラム
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ