TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116665
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011210
出願日
2024-01-29
発明の名称
車両用表示制御方法及び車両用表示制御装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/0969 20060101AFI20250801BHJP(信号)
要約
【課題】自動運転走行に関する表示に対して乗員が煩わしさを感じず且つ不安を抱かない車両用表示制御方法及び車両用表示制御装置を提供する。
【解決手段】表示装置9に表示される車両1の自動運転走行に関する情報を自動運転コントローラ7aによって制御するにあたり、自動運転コントローラ7aは、乗員の自動運転走行に対する慣れ度レベル(慣れの度合い)を検出し、慣れ度レベルに応じて表示装置9に表示される情報を制御する。
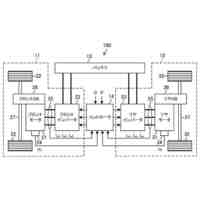
【選択図】図2
特許請求の範囲
【請求項1】
表示装置に表示される車両の自動運転走行に関する情報をコントローラによって制御する車両用表示制御方法であって、
前記コントローラは、乗員の自動運転走行に対する慣れの度合いを検出し、前記慣れの度合いに応じて前記表示装置に表示される情報を制御することを特徴とする車両用表示制御方法。
続きを表示(約 360 文字)
【請求項2】
死角に存在する物体の情報を取得し、前記慣れの度合いが低い場合に、前記死角に存在する物体の情報を前記表示装置に表示させることを特徴とする請求項1に記載の車両用表示制御方法。
【請求項3】
自動運転走行中における乗員の行動の状態を検出し、前記乗員の行動の状態が落ち着きのない状態である場合に前記慣れの度合いが低いと検出することを特徴とする請求項2に記載の車両用表示制御方法。
【請求項4】
表示装置に表示される車両の自動運転走行に関する情報を制御するコントローラを備えた車両用表示制御装置であって、
前記コントローラは、乗員の自動運転走行に対する慣れの度合いを検出し、前記慣れの度合いに応じて前記表示装置に表示される情報を制御することを特徴とする車両用表示制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用表示制御方法及び車両用表示制御装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
下記特許文献1に記載される車両用表示制御装置では、車両の予測進路領域内の障害物を表示装置に表示、特に強調表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-24570号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1のように、予測進路領域内の全ての障害物を表示装置に表示すると、乗員が煩わしいと感じる場合がある。そこで、車両の自動運転走行に関わりのない物体、例えば予測進路から遠く離れている物体や遠ざかる物体の表示を省略することが考えられ、そのように表示物体を省略することで表示に対する乗員の煩わしさを低減し得る。特に、自動運転技術の向上に伴って、死角に存在する物体(以下、死角物体ともいう)の情報を取得することができるようになると考えられ、上記表示省略技術によって、死角物体が車両の自動運転走行に関わらない場合には、その死角物体を表示装置で表示しない場合もあり得るが、乗員によっては、表示されない死角物体の存在に対して不安を抱くことも考えられる。
本発明は、自動運転走行に関する表示に対して乗員が煩わしさを感じず且つ不安を抱かない車両用表示制御方法及び車両用表示制御装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様は、表示装置に表示される車両の自動運転走行に関する情報をコントローラによって制御するにあたり、コントローラは、乗員の自動運転走行に対する慣れの度合いを検出し、慣れの度合いに応じて表示装置に表示される情報を制御することを要旨とする。
【発明の効果】
【0006】
本発明の一態様によれば、自動運転走行に慣れている乗員に対しては煩わしさを感じさせず、慣れていない乗員に対しては不安を抱かせないことができる。
【図面の簡単な説明】
【0007】
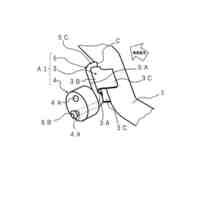
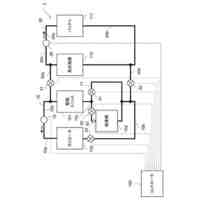
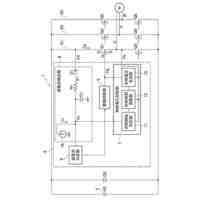
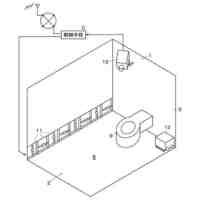
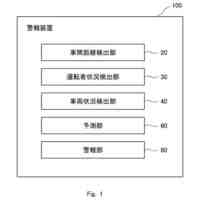
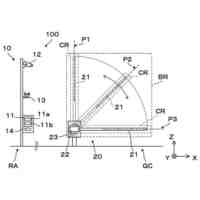
本発明の一実施形態である車両用表示システムが搭載された自動運転車両の概略構成を示す全体図である。
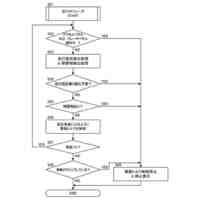
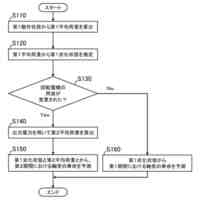
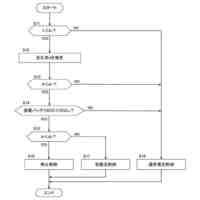
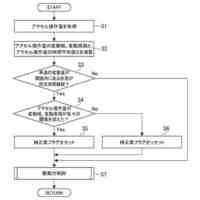
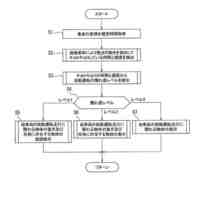
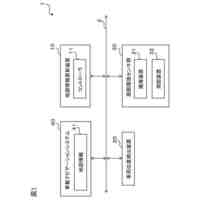
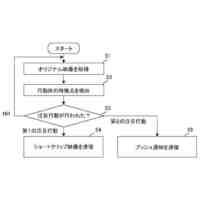
図1の自動運転制御装置で実行される演算処理のフローチャートである。
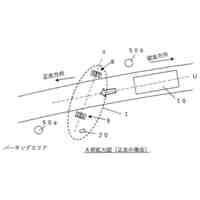
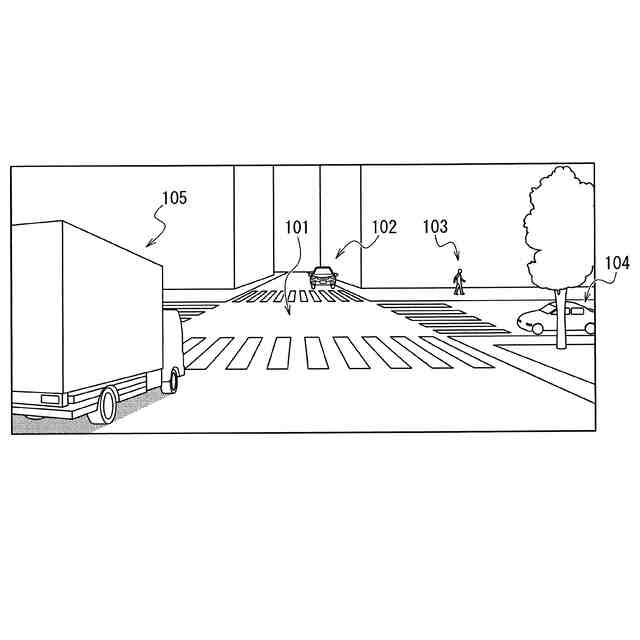
車両の前方の状態の一例を示す説明図である。
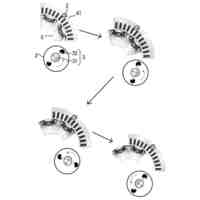
図2のレベル3で表示装置に表示される物体情報の説明図である。
図2のレベル2で表示装置に表示される物体情報の説明図である。
図2のレベル1で表示装置に表示される物体情報の説明図である。
図2のレベル1で表示装置に表示される物体情報の説明図である。
【発明を実施するための形態】
【0008】
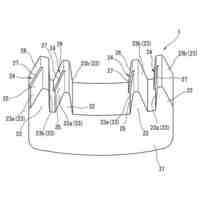
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。図1に示す自動運転車両(以下、車両ともいう)1では、一例として、車両1の前方側と後方側に2列に配置された座席8F、8Rのうち、後方側の座席8Rに客に相当する乗員が着席し、自動運転によって目的地まで走行する。前方の座席8Fには、一例として、いわゆる運転者に代わって、車両1を管理する車両管理者が着席する。前後それぞれの座席8F、8Rの席数はいくつであってもよい。後部座席8Rの(それぞれの)前方には、表示装置9が配置されている。この表示装置9は、例えばパーソナルコンピュータ(PC)のモニタのように、種々の映像や動画を映し出すことができるが、表示内容の1つとして、車両1の自動運転走行に関する情報が表示され、その表示内容は、後述する自動運転制御装置7(実際には自動運転コントローラ7a)によって制御される。この自動運転走行に関する情報については後段に詳述するが、その表示内容は、車両1の予測進路、及び、その前方、すなわち車両走行方向先方と注意方向(後述)の車両などの移動物体を主体とする。また、この車両1には、後部座席8Rに着席している乗員の表情を撮像するためのカメラ10が設けられており、その撮像情報は自動運転制御装置7に入力される。自動運転制御装置7は、少なくとも、経由地を含めて出発地から目的地まで車両1を自動運転で移動する機能を有する。また、この車両1は、後述する通信システム6を介して、路側機などのインフラ設備Eと路車間通信を行うことができると共に、他の車両Mと車車間通信を行うこともできる。路車間通信や車車間通信では、信号情報や規制情報、渋滞や混雑などの道路情報を授受することができ、例えば、自車両1にとっての死角に存在する物体の情報なども取得することができる。なお、車両1には、一般の現行車両と同様に、車両1の周囲を見ることができる車窓が設けられている。
【0009】
車両1は、図1に示すように、車両1を駆動するための駆動装置2、車両1を制動するための制動装置3、及び車両1を操向(操舵)するための操向装置4を備えている。駆動装置2は、エンジンや電動モータのような駆動源(不図示)を備えると共に、駆動源による車両1の駆動力を制御するための駆動コントローラ2aを備えて構成される。駆動コントローラ2aは、駆動源の作動状態を電子制御するための演算処理を司るプロセッサPと、プロセッサPで実行されるプログラムなどを記憶する記憶装置Rを備えて構成される。制動装置3は、液圧ブレーキ機構や電動ブレーキ機構のような制動機構(不図示)を備えると共に、制動機構による車両1の制動力を制御するための制動コントローラ3aを備えて構成される。制動コントローラ3aは、制動機構の作動状態を電子制御するための演算処理を司るプロセッサPと、プロセッサPで実行されるプログラムなどを記憶する記憶装置Rを備えて構成される。操向装置4は、液圧ステアリング機構や電動ステアリング機構のような操向機構(不図示)を備えると共に、操向機構による車両1の操向状態を制御するための操向コントローラ4aを備えて構成される。操向コントローラ4aは、操向機構の作動状態を電子制御するための演算処理を司るプロセッサPと、プロセッサPで実行されるプログラムなどを記憶する記憶装置Rを備えて構成される。
【0010】
また、車両1は、周辺環境を認識するための環境認識システム5、前述した路車間通信や車車間通信を行うための通信システム6、自動運転を行うための自動運転制御装置7を備えている。環境認識システム5は、カメラやレーダ、センサなどの周辺環境情報取得手段(不図示)を備えると共に、周辺環境情報取得手段で取得された周辺環境情報から車両1の周辺のどこに何があるのかを検出する環境認識コントローラ5aを備えて構成される。環境認識コントローラ5aは、周辺環境情報を解析するための演算処理を司るプロセッサPと、プロセッサPで実行されるプログラムなどを記憶する記憶装置Rを備えて構成される。なお、周辺環境情報を解析して、どこに何があるのかを検出する技術は、既に十分開発されている。通信システム6は、無線通信装置などの通信装置(不図示)を備えると共に、通信装置による通信対象や通信状態を制御する通信コントローラ6aを備えて構成される。通信コントローラ6aは、通信対象や通信状態、すなわち通信タイミングや通信時間を制御するための演算処理を司るプロセッサPと、プロセッサPで実行されるプログラムなどを記憶する記憶装置Rを備えて構成される。自動運転制御装置7は、環境認識システム5で得られた周辺環境情報や通信システム6で得られた通信情報などの制御入力に基づいて、駆動装置2や制動装置3、操向装置4における制御対象の制御状態を統括する自動運転コントローラ7aを備えて構成される。自動運転コントローラ7aは、制御入力から制御対象の作動状態の制御出力を得るための演算処理を司るプロセッサPと、プロセッサPで実行されるプログラムなどを記憶する記憶装置Rを備えて構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
回転電機
13日前
日産自動車株式会社
位置補正部材
16日前
日産自動車株式会社
車両の排気管支持構造
3日前
日産自動車株式会社
情報処理方法及び制御装置
5日前
日産自動車株式会社
車両管理方法及び車両管理装置
3日前
日産自動車株式会社
配車管理装置及び配車管理方法
2日前
日産自動車株式会社
車両制御方法及び車両制御装置
10日前
日産自動車株式会社
車両制御方法及び車両制御装置
10日前
日産自動車株式会社
車両制御方法および車両制御装置
12日前
日産自動車株式会社
車両の捩り振動制振方法および装置
2日前
日産自動車株式会社
情報処理方法及び軸受寿命予測装置
12日前
日産自動車株式会社
覚醒状態判別方法及び覚醒状態判別装置
4日前
日産自動車株式会社
移動物体認識方法及び移動物体認識装置
9日前
日産自動車株式会社
電動車両の制御方法及び電動車両システム
10日前
日産自動車株式会社
車両の駆動力制御方法および駆動力制御装置
6日前
日産自動車株式会社
車両用表示制御方法及び車両用表示制御装置
2日前
日産自動車株式会社
車両の冷媒制御システム及び車両の冷媒制御方法
10日前
日産自動車株式会社
バッテリ暖気制御方法、及びバッテリ暖気制御装置
5日前
日産自動車株式会社
電力変換装置の制御装置および電力変換装置の制御方法
5日前
日産自動車株式会社
DC/DCコンバータの制御方法、及び、DC/DCコンバータの制御装置
2日前
日産自動車株式会社
地図情報更新装置及び地図情報更新方法
9日前
日本精機株式会社
路面投影装置
1か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
3日前
ニッタン株式会社
発信機
2か月前
個人
防犯に特化したアプリケーション
1か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
5日前
ニッタン株式会社
発信機
1か月前
東京都公立大学法人
液滴検出装置
1か月前
トヨタ自動車株式会社
車両
4日前
TOA株式会社
拡声放送システム
1か月前
個人
逆走・正走車両検出システム
3か月前
株式会社JVCケンウッド
警報装置
1か月前
株式会社アジラ
データ転送システム
1か月前
日本信号株式会社
情報提供システム
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ