TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124212
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020109
出願日
2024-02-14
発明の名称
計測装置及び計測方法
出願人
レーザーテック株式会社
代理人
個人
主分類
G01B
11/02 20060101AFI20250819BHJP(測定;試験)
要約
【課題】ウェーハの中心からエッジまでの距離をウェーハの外周に渡って簡便な方法で高精度に計測する計測装置及び計測方法を提供する。
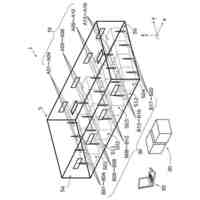
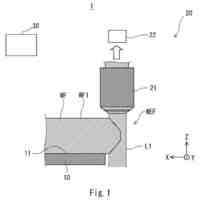
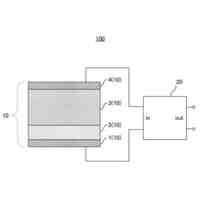
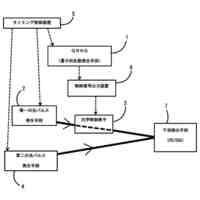
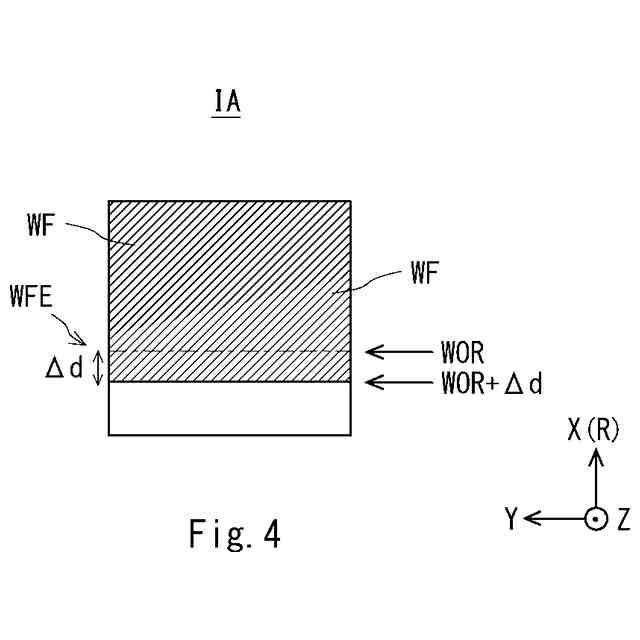
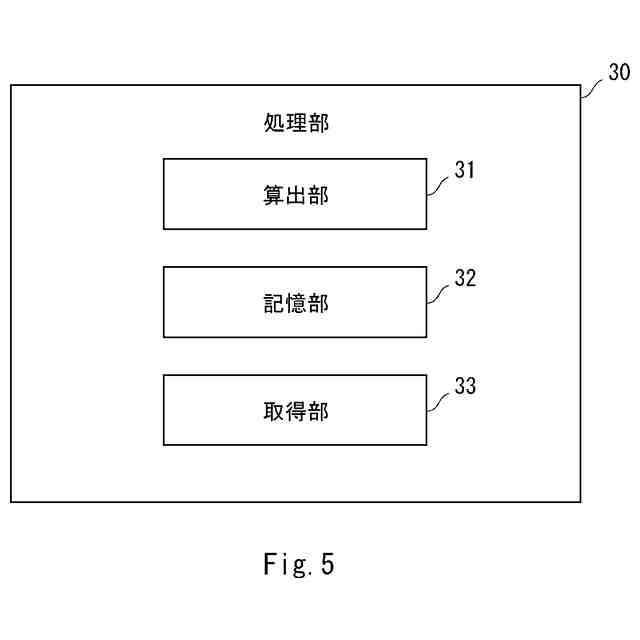
【解決手段】本開示に係る計測装置1は、試験ウェーハを回転軸C1の周りで回転させるステージ10と、試験ウェーハのエッジWFEを含む撮像領域IAを撮像する撮像部20と、試験ウェーハをステージ10で1回転させながら撮像したエッジ画像から、ステージ10の回転角θに対するエッジWFEの位置に対応した基準端部画素座標を算出する算出部31と、基準ウェーハにおける各基準端部画素座標と、各基準半径とを対応付けて記憶する記憶部32と、試験ウェーハの基準端部画素座標と、基準ウェーハの基準端部画素座標と、を比較することにより、試験ウェーハの基準半径を取得する取得部33と、を備え、算出部31は、所定角度θ1におけるエッジWFEの位置を示す端部画素座標を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
回転軸を有し、試験ウェーハを前記回転軸の周りで回転させるステージと、
前記回転軸が延びる一方側から前記試験ウェーハのエッジを含む撮像領域を撮像する撮像部と、
前記試験ウェーハを前記ステージで回転させながら撮像したエッジ画像から、前記ステージの回転角に対する撮像領域内の前記エッジの接線に直交する半径方向における前記エッジの位置に対応した基準端部画素座標を算出する算出部と、
既知の基準半径を有する基準ウェーハを前記ステージで回転させながら撮像した画像から算出された前記基準ウェーハにおける前記基準端部画素座標を、各基準半径と対応付けて記憶する記憶部と、
前記試験ウェーハの前記基準端部画素座標と、前記基準ウェーハの前記基準端部画素座標とを比較することにより、前記試験ウェーハの前記基準半径を取得する取得部と、
を備え、
前記算出部は、
前記試験ウェーハを所定角度、回転させたときの所定角画像から、前記所定角度における前記エッジの位置に対応した所定角端部画素座標を算出し、
算出した前記所定角度における前記所定角端部画素座標と、取得した前記試験ウェーハの前記基準半径と、に基づいて、前記所定角度における前記試験ウェーハの前記所定角度における前記エッジの前記基準半径との差分を算出する、
計測装置。
続きを表示(約 1,400 文字)
【請求項2】
前記所定角画像が撮像されるときの前記撮像部の倍率は、前記エッジ画像が撮像されるときの前記撮像部の倍率よりも大きい、
請求項1に記載の計測装置。
【請求項3】
前記算出部は、前記エッジ画像に基づいて前記試験ウェーハの中心からの偏芯量を算出し、
前記ステージは、前記所定角画像が撮像されるときの前記所定角度に合わせた前記偏芯量を打ち消すように、前記試験ウェーハを前記半径方向に移動させ、
前記取得部は、前記半径方向に移動させた前記試験ウェーハの前記所定角度での前記所定角端部画素座標を算出する、
請求項1に記載の計測装置。
【請求項4】
前記試験ウェーハの所定位置に対してマーキング処理を行うマーキング処理部をさらに備え、
前記所定位置は、前記所定角度及び前記所定角度における前記試験ウェーハの前記エッジからの距離に基づき特定される
請求項1~3のいずれか1項に記載の計測装置。
【請求項5】
回転軸を有するステージで、試験ウェーハを前記回転軸の周りで回転させながら前記回転軸が延びる一方側から前記試験ウェーハのエッジを含む撮像領域を撮像部が撮像したエッジ画像から、前記ステージの回転角に対する撮像領域内の前記エッジの接線に直交する半径方向における前記エッジの位置に対応した基準端部画素座標を算出する第1ステップと、
既知の基準半径を有する基準ウェーハを前記ステージで回転させながら前記撮像部が撮像した画像から算出された前記基準ウェーハにおける前記基準端部画素座標を、各基準半径に対応付けて記憶する記憶部に記憶された前記基準端部画素座標と、前記試験ウェーハの前記基準端部画素座標と、を比較することにより、前記試験ウェーハの前記基準半径を取得する第2ステップと、
前記試験ウェーハを所定角度、回転させたときに前記撮像部が撮像した所定角画像から、前記所定角度における前記エッジの位置に対応した所定角端部画素座標を算出する第3ステップと、
算出した前記所定角度における前記所定角端部画素座標と、取得した前記試験ウェーハの前記基準半径と、に基づいて、前記所定角度における前記試験ウェーハの前記所定角度における前記エッジの前記基準半径との差分を算出する第4ステップと、
を備えた計測方法。
【請求項6】
前記第3ステップにおける前記撮像部の倍率は、前記第1ステップにおける前記撮像部の倍率よりも大きい、
請求項5に記載の計測方法。
【請求項7】
前記第1ステップにおいて、
前記エッジ画像に基づいて、前記試験ウェーハの中心からの偏芯量を算出し、
前記第3ステップにおいて、
前記ステージに、前記所定角画像が撮像されるときの前記所定角度に合わせた前記偏芯量を打ち消すように、前記試験ウェーハを前記半径方向に移動させ、
前記半径方向に移動させた前記試験ウェーハの前記所定角度での前記所定角端部画素座標を算出する、
請求項5に記載の計測方法。
【請求項8】
前記試験ウェーハの所定位置に対してマーキング処理を行う第5ステップをさらに備え、
前記第5ステップにおいて、
前記所定位置は、前記所定角度及び前記所定角度における前記試験ウェーハの前記エッジからの距離に基づき特定される、
請求項5~7のいずれか1項に記載の計測方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、計測装置及び計測方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば、特許文献1には、ウェーハの中心からエッジまでの距離を、ウェーハの外周に渡ってウェーハの半径方向の角度ごとに計測する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第5024555号公報
特許第6210525号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ウェーハの中心からエッジまでの距離をウェーハの外周に渡って簡便な方法で高精度に計測することが所望されている。
【0005】
本開示は、このような問題を解決するためになされたものであり、ウェーハの中心からエッジまでの距離をウェーハの外周に渡って簡便な方法で高精度に計測することができる計測装置及び計測方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る計測装置は、回転軸を有し、試験ウェーハを前記回転軸の周りで回転させるステージと、前記回転軸が延びる一方側から前記試験ウェーハのエッジを含む撮像領域を撮像する撮像部と、前記試験ウェーハを前記ステージで回転させながら撮像したエッジ画像から、前記ステージの回転角に対する撮像領域内の前記エッジの接線に直交する半径方向における前記エッジの位置に対応した基準端部画素座標を算出する算出部と、既知の基準半径を有する基準ウェーハを前記ステージで回転させながら撮像した画像から算出された前記基準ウェーハにおける前記基準端部画素座標を、各基準半径と対応付けて記憶する記憶部と、前記試験ウェーハの前記基準端部画素座標と、前記基準ウェーハの前記基準端部画素座標とを比較することにより、前記試験ウェーハの前記基準半径を取得する取得部と、を備え、前記算出部は、前記試験ウェーハを所定角度、回転させたときの所定角画像から、前記所定角度における前記エッジの位置に対応した所定角端部画素座標を算出し、算出した前記所定角度における前記所定角端部画素座標と、取得した前記試験ウェーハの前記基準半径と、に基づいて、前記所定角度における前記試験ウェーハの前記所定角度における前記エッジの前記基準半径との差分を算出する。
【0007】
上記計測装置では、前記所定角画像が撮像されるときの前記撮像部の倍率は、前記エッジ画像が撮像されるときの前記撮像部の倍率よりも大きくてもよい。
【0008】
上記計測装置では、前記算出部は、前記エッジ画像に基づいて前記試験ウェーハの中心からの偏芯量を算出し、前記ステージは、前記所定角画像が撮像されるときの前記所定角度に合わせた前記偏芯量を打ち消すように、前記試験ウェーハを前記半径方向に移動させ、前記取得部は、前記半径方向に移動させた前記試験ウェーハの前記所定角度での前記所定角端部画素座標を算出してもよい。
【0009】
上記計測装置では、前記試験ウェーハの所定位置に対してマーキング処理を行うマーキング処理部をさらに備え、前記所定位置は、前記所定角度及び前記所定角度における前記試験ウェーハの前記エッジからの距離に基づき特定されてもよい。
【0010】
本開示に係る計測方法は、回転軸を有するステージで、試験ウェーハを前記回転軸の周りで回転させながら前記回転軸が延びる一方側から前記試験ウェーハのエッジを含む撮像領域を撮像部が撮像したエッジ画像から、前記ステージの回転角に対する撮像領域内の前記エッジの接線に直交する半径方向における前記エッジの位置に対応した基準端部画素座標を算出する第1ステップと、既知の基準半径を有する基準ウェーハを前記ステージで回転させながら前記撮像部が撮像した画像から算出された前記基準ウェーハにおける前記基準端部画素座標を、各基準半径に対応付けて記憶する記憶部に記憶された前記基準端部画素座標と、前記試験ウェーハの前記基準端部画素座標と、を比較することにより、前記試験ウェーハの前記基準半径を取得する第2ステップと、前記試験ウェーハを所定角度、回転させたときに前記撮像部が撮像した所定角画像から、前記所定角度における前記エッジの位置に対応した所定角端部画素座標を算出する第3ステップと、算出した前記所定角度における前記所定角端部画素座標と、取得した前記試験ウェーハの前記基準半径と、に基づいて、前記所定角度における前記試験ウェーハの前記所定角度における前記エッジの前記基準半径との差分を算出する第4ステップと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社辰巳菱機
システム
8日前
学校法人立命館
液面レベルセンサ
7日前
株式会社カワタ
サンプリング装置
3日前
日本精工株式会社
分注装置
6日前
TDK株式会社
ガスセンサ
2日前
三菱マテリアル株式会社
温度センサ
6日前
戸田建設株式会社
測量機
6日前
本田技研工業株式会社
位置推定装置
2日前
本田技研工業株式会社
物体検出装置
6日前
株式会社エイアンドティー
電解質分析装置
6日前
株式会社村田製作所
圧力センサ装置
1日前
三浦工業株式会社
ダイオキシン類の分画方法
2日前
株式会社エス・テイ・ジャパン
試料加工部材
6日前
株式会社国際電気
監視システム
1日前
住友ゴム工業株式会社
脱輪抑止システム
3日前
株式会社キリウ
溶湯液位測定装置
6日前
株式会社ケー・エフ・シー
防水シート検査装置
1日前
レーザーテック株式会社
計測装置及び計測方法
2日前
株式会社IHI検査計測
プローブ取付装置
3日前
アルプスアルパイン株式会社
磁界検出装置
1日前
セイコーエプソン株式会社
電子機器
6日前
トヨタ自動車株式会社
電源システム
3日前
愛知時計電機株式会社
超音波流量計
6日前
株式会社日本マイクロニクス
電気的接続装置
2日前
株式会社テイエルブイ
肉厚測定システム及び肉厚測定方法
1日前
ヤンマーホールディングス株式会社
作業車両
8日前
国立大学法人秋田大学
磁気転写電荷誘起型磁界センサ
1日前
本田技研工業株式会社
車両制御装置
2日前
三恵技研工業株式会社
融雪レドーム及びその製造方法
6日前
株式会社ミヤワキ
計測装置
1日前
トヨタ自動車株式会社
電池充電率の推定方法
1日前
AZAPA株式会社
電池パック
7日前
個人
量子的状態の相対的未確定性を検証するための干渉実験装置
6日前
株式会社日立製作所
沿岸環境監視システム
6日前
トヨタ自動車株式会社
車載バッテリの状態検査装置
2日前
有限会社センテック
部品組付治具および部品組付支援装置
6日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ