TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126397
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022537
出願日
2024-02-19
発明の名称
車両の制動制御装置、車両の制動制御方法及びコンピュータプログラム
出願人
株式会社SUBARU
代理人
弁理士法人太田特許事務所
主分類
B60W
30/02 20120101AFI20250822BHJP(車両一般)
要約
【課題】アンチスキッド制御中の車体の挙動を安定化可能な改良された車両の制動制御装置を提供する。
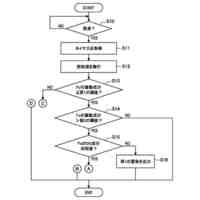
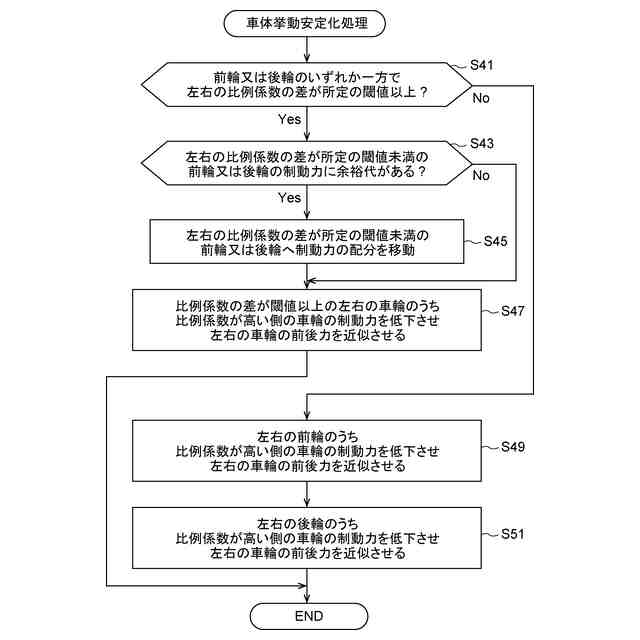
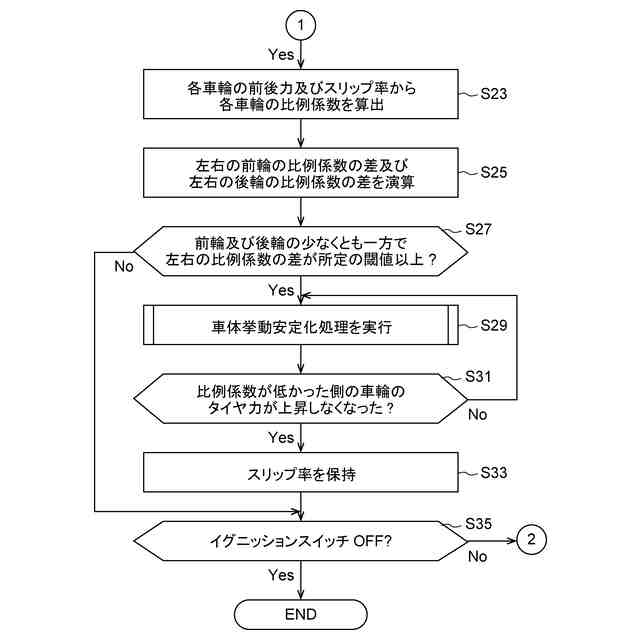
【解決手段】車両の制動制御装置は、アンチスキッド制御中にタイヤ力センサにより検出されるタイヤ力に基づいて求められる各車輪の摩擦係数とスリップ率との関係を示す比例係数を算出し、前輪及び後輪それぞれについて左右の車輪の比例係数の差を算出し、前輪及び後輪の少なくとも一方又は両方の比例係数の差が所定の閾値以上の場合に、比例係数の差が所定の閾値以上の前輪及び後輪の左右の車輪のうち、比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力の差を所定の範囲内とする。
【選択図】図6
特許請求の範囲
【請求項1】
アンチスキッド制御を実行する車両の制動制御装置において、
一つ又は複数のプロセッサと、前記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、
前記一つ又は複数のプロセッサは、
前記アンチスキッド制御中にタイヤ力センサにより検出されるタイヤ力に基づいて求められる各車輪の摩擦係数とスリップ率との関係を示す比例係数を算出することと、
前輪及び後輪それぞれについて左右の車輪の前記比例係数の差を算出することと、
前記前輪及び前記後輪の少なくとも一方又は両方の前記比例係数の差が所定の閾値以上の場合に、前記比例係数の差が所定の閾値以上の前記前輪及び前記後輪の左右の車輪のうち、前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力の差を所定の範囲内とすることと、
を実行する、車両の制動制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記一つ又は複数のプロセッサは、
前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力を所定の範囲内とし、前記比例係数が低かった側の車輪のタイヤ力が上昇しなくなったときに前記スリップ率を保持する、
請求項1に記載の車両の制動制御装置。
【請求項3】
前記一つ又は複数のプロセッサは、
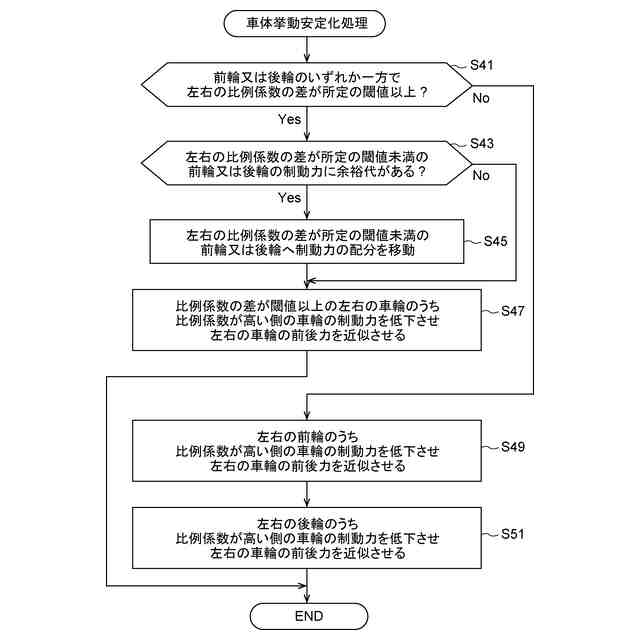
前記前輪及び前記後輪のうちのいずれか一方の前記比例係数の差が所定の閾値以上の場合、前記比例係数の差が所定の閾値未満の他方の前記前輪又は前記後輪の制動力に余裕代があるか否かを判定し、
前記余裕代がある場合、前記余裕代がある前記他方の前記前輪又は前記後輪へ前記一方の前記前輪又は前記後輪から制動力の配分を移動させる、
請求項1に記載の車両の制動制御装置。
【請求項4】
前記一つ又は複数のプロセッサは、
前記前輪及び前記後輪の両方の前記比例係数の差が所定の閾値以上の場合、前輪側で前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力の差を所定の範囲内とした後、後輪側で前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力の差を所定の範囲内とする、
請求項1に記載の車両の制動制御装置。
【請求項5】
前記一つ又は複数のプロセッサは、
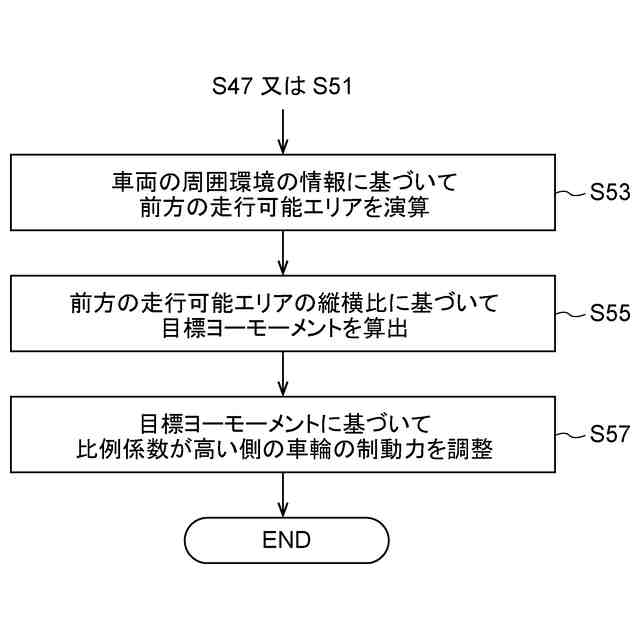
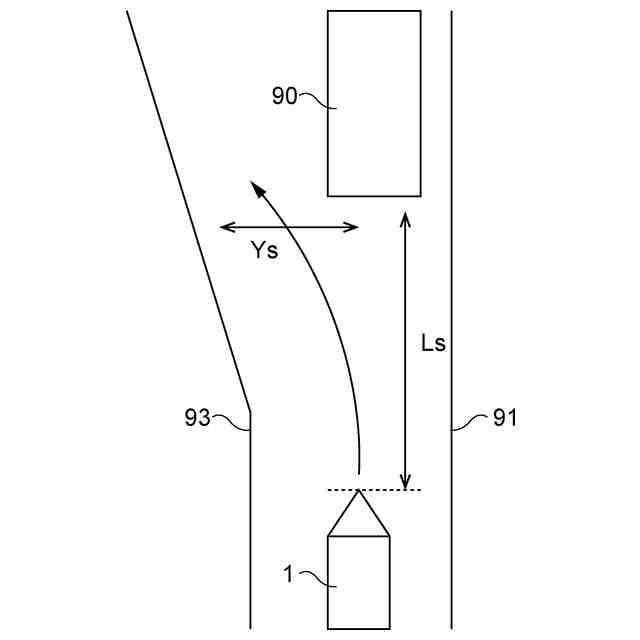
前記車両の前方の走行可能エリアを求め、前記走行可能エリアの縦横比に基づいて目標ヨーモーメントを算出し、
前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力の差を所定の範囲内とした後、前記目標ヨーモーメントに基づいて前記比例係数が高い側の車輪の制動力を調整する、
請求項1に記載の車両の制動制御装置。
【請求項6】
コンピュータが、
アンチスキッド制御中にタイヤ力センサにより検出される各車輪の前後力及びスリップ率に基づいて、各車輪のスリップ率と前後力との比である比例係数を算出することと、
前輪及び後輪それぞれについて左右の車輪の前記比例係数の差を算出することと、
前記前輪及び前記後輪の少なくとも一方又は両方の前記比例係数の差が所定の閾値以上の場合に、前記比例係数の差が所定の閾値以上の前記前輪及び前記後輪の左右の車輪うち、前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力を所定の範囲内とすることと、
を実行する、車両の制動制御方法。
【請求項7】
コンピュータに、
アンチスキッド制御中にタイヤ力センサにより検出される各車輪の前後力及びスリップ率に基づいて、各車輪のスリップ率と前後力との比である比例係数を算出することと、
前輪及び後輪それぞれについて左右の車輪の前記比例係数の差を算出することと、
前記前輪及び前記後輪の少なくとも一方又は両方の前記比例係数の差が所定の閾値以上の場合に、前記比例係数の差が所定の閾値以上の前記前輪及び前記後輪の左右の車輪うち、前記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力を所定の範囲内とすることと、
を実行させる、コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の制動制御装置、車両の制動制御方法及びコンピュータプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
車体の制動時において、車輪がロックすることによる車体の滑走を防止するアンチスキッドブレーキシステム(以下、「ABS」ともいう)が知られている。ABSは、例えばタイヤと路面との摩擦係数が低い低摩擦状態で強いブレーキをかけた場合に、車輪がロックしたことによる車体の滑走を検知すると制動力を低下させ、車輪が回転し始めると再び制動力を増大させる処理を繰り返し、各車輪に最大限の制動力を発揮させる。
【0003】
ABSによるアンチスキッド制御中においては、タイヤのスリップ率の上限及び下限が設定され、スリップ率が上限及び下限の範囲内に収まるように制動力の制御が行われる。このため、制動力が一定で摩擦係数が低い路面から高い路面へ切り替わると、スリップ率が低下し、アンチスキッド制御が介入することによりスリップ率を増加させるために制動力が増大される。
【0004】
ここで、車体の制動時において、左右の車輪のうちの一輪のみが低摩擦状態から高摩擦状態に変化すると、当該車輪の制動力が増大して左右の制動力差が生じ、車体にヨーモーメントが発生する。低摩擦状態においては、タイヤのスリップ角が大きく変化しない限りタイヤの幅方向の力(横力)が上昇しないため、車体の挙動が乱れやすい。
【0005】
これに対して、特許文献1には、制動中に左右両輪が低摩擦状態にある状態から一輪が高摩擦状態に変化したことが検出された場合、検出されたヨーレートと設定された目標ヨーレートとの偏差が所定値以下になるように高摩擦状態の車輪のホイールシリンダに発生させるブレーキ液圧の上昇を制限する技術が開示されている。具体的には、特許文献1に記載のブレーキ制御装置は、高摩擦状態の車輪に対するABS制御増圧時のホイールシリンダ液圧を、ヨーレートの偏差が所定値未満である場合には最大の勾配で増加させ、ヨーレートの偏差が所定値以上である場合には一定に保持する構成を有している。
【先行技術文献】
【特許文献】
【0006】
特開2016-171294号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、路面の摩擦係数を瞬時に精度よく推定することは技術的な難易度が高く、容易ではない。また、例えば路面に唯一接地するタイヤに発生するタイヤ力又はタイヤ力に相関する検出値を用いて路面の摩擦係数を瞬時に精度よく推定することができたとしても、タイヤ力が実際に発生した後でなければ摩擦係数の推定値に反映させることができないため、空走時間が生じることになる。
【0008】
本開示は、上記問題に鑑みてなされたものであり、本開示の目的とするところは、アンチスキッド制御中の車体の挙動を安定化可能な改良された車両の制動制御装置、車両の制動制御方法及びコンピュータプログラムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本開示のある観点によれば、アンチスキッド制御を実行する車両の制動制御装置において、一つ又は複数のプロセッサと、上記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、上記一つ又は複数のプロセッサは、上記アンチスキッド制御中にタイヤ力センサにより検出されるタイヤ力に基づいて求められる各車輪の摩擦係数とスリップ率との関係を示す比例係数を算出することと、前輪及び後輪それぞれについて左右の車輪の上記比例係数の差を算出することと、上記前輪及び上記後輪の少なくとも一方又は両方の上記比例係数の差が所定の閾値以上の場合に、上記比例係数の差が所定の閾値以上の上記前輪及び上記後輪の左右の車輪のうち、上記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力の差を所定の範囲内とすることと、を実行する車両の制動制御装置が提供される。
【0010】
また、上記課題を解決するために本開示の別の観点によれば、コンピュータが、アンチスキッド制御中にタイヤ力センサにより検出される各車輪の前後力及びスリップ率に基づいて、各車輪のスリップ率と前後力との比である比例係数を算出することと、前輪及び後輪それぞれについて左右の車輪の上記比例係数の差を算出することと、上記前輪及び上記後輪の少なくとも一方又は両方の上記比例係数の差が所定の閾値以上の場合に、上記比例係数の差が所定の閾値以上の上記前輪及び上記後輪の左右の車輪うち、上記比例係数が高い側の車輪の制動力を低下させて左右の車輪の前後力を所定の範囲内とすることと、を実行する車両の制動制御方法が提供される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
4日前
株式会社SUBARU
車両
4日前
株式会社SUBARU
潤滑構造
18日前
株式会社SUBARU
エンジン
24日前
株式会社SUBARU
解析方法
29日前
株式会社SUBARU
エンジン
3日前
株式会社SUBARU
判定装置
1日前
株式会社SUBARU
容器ホルダ
24日前
株式会社SUBARU
無段変速機
26日前
株式会社SUBARU
前部車体構造
25日前
株式会社SUBARU
運転支援装置
1日前
株式会社SUBARU
運転支援装置
1日前
株式会社SUBARU
情報提示装置
10日前
株式会社SUBARU
運転支援装置
12日前
株式会社SUBARU
電池システム
25日前
株式会社SUBARU
エアバッグ装置
1か月前
株式会社SUBARU
車両用保護装置
1日前
株式会社SUBARU
車両用制御装置
1日前
株式会社SUBARU
車両用制御装置
23日前
株式会社SUBARU
車両用警告装置
22日前
株式会社SUBARU
車両用制御装置
5日前
株式会社SUBARU
通気管端部構造
18日前
株式会社SUBARU
エンジンシステム
18日前
株式会社SUBARU
アーチガーニッシュ
17日前
株式会社SUBARU
車両の車外保護装置
26日前
株式会社SUBARU
センサ位置決定方法
29日前
株式会社SUBARU
車両の乗員保護装置
24日前
株式会社SUBARU
車両の乗員保護装置
24日前
株式会社SUBARU
車両のバンパビーム
25日前
株式会社SUBARU
車両の手動運転支援装置
22日前
株式会社SUBARU
車両用サッシュドア構造
5日前
株式会社SUBARU
車両用フェンダカバー構造
3日前
株式会社SUBARU
可変バルブタイミング機構
8日前
株式会社SUBARU
車両用バッテリ監視システム
24日前
株式会社SUBARU
車体用長尺パネル及び車体構造
3日前
株式会社SUBARU
可変バルブタイミング機構および車両
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ