TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126617
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022941
出願日
2024-02-19
発明の名称
車両用制御装置
出願人
株式会社SUBARU
代理人
弁理士法人筒井国際特許事務所
主分類
B60P
1/00 20060101AFI20250822BHJP(車両一般)
要約
【課題】ウインチの操作を簡単にする。
【解決手段】第1車両に設けられる車両用制御装置は、動力源に連結されるドラムと、前記ドラムに巻かれるワイヤーロープと、を備えるウインチを有する。前記車両用制御装置は、互いに通信可能に接続されるプロセッサおよびメモリを備え、前記ウインチを制御する制御システムを有する。前記制御システムは、前記第1車両と他の第2車両とが前記ワイヤーロープを介して互いに連結されて且つ前記ドラムが回転している状態のもとで、前記第1車両と前記第2車両との相対的な傾斜角度が閾値を下回る場合に前記ドラムの回転を停止させる。
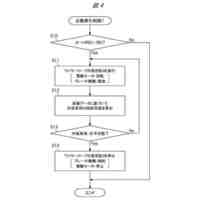
【選択図】図4
特許請求の範囲
【請求項1】
第1車両に設けられる車両用制御装置であって、
動力源に連結されるドラムと、前記ドラムに巻かれるワイヤーロープと、を備えるウインチと、
互いに通信可能に接続されるプロセッサおよびメモリを備え、前記ウインチを制御する制御システムと、
を有し、
前記制御システムは、
前記第1車両と他の第2車両とが前記ワイヤーロープを介して互いに連結されて且つ前記ドラムが回転している状態のもとで、前記第1車両と前記第2車両との相対的な傾斜角度が閾値を下回る場合に前記ドラムの回転を停止させる、
車両用制御装置。
続きを表示(約 380 文字)
【請求項2】
請求項1に記載の車両用制御装置において、
前記傾斜角度は、ピッチ角度とロール角度との少なくとも何れか一方である、
車両用制御装置。
【請求項3】
請求項1に記載の車両用制御装置において、
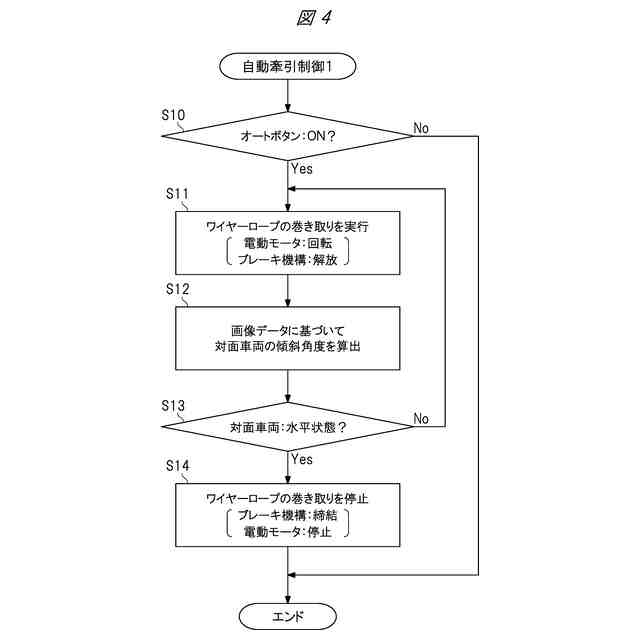
車両前方または車両後方を撮像するカメラユニットを有し、
前記制御システムは、前記カメラユニットが撮像した画像データに基づいて前記傾斜角度を算出する、
車両用制御装置。
【請求項4】
請求項1に記載の車両用制御装置において、
前記制御システムは、前記第2車両から前記傾斜角度のデータを受信する無線通信部を備える、
車両用制御装置。
【請求項5】
請求項1に記載の車両用制御装置において、
前記動力源は、電動モータである、
車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両用制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
トレーラや他の車両を牽引する車両が開発されている(特許文献1および2参照)。また、泥濘等の悪路において走行不能となるスタック状態から自車両や他車両を救出するため、牽引用のウインチを備えた車両が開発されている(特許文献3参照)。車両に搭載されるウインチとして、電動モータによって駆動される電動ウインチがあり、トランスミッションから分配されるエンジン動力によって駆動されるPTO(Power Take Off)方式のウインチがある。
【先行技術文献】
【特許文献】
【0003】
特許第7060707号公報
特開2011-155800号公報
特表昭62-500235号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、悪路でスタックした他の車両(以下、スタック車両と記載する。)を救出する際には、ウインチから伸ばしたワイヤーロープをスタック車両の牽引フックに取り付けた後に、ワイヤーロープを巻き取ることでスタック車両が悪路から引き出される。ここで、安全を確保しつつスタック車両を救出するためには、作業者による繊細なウインチの巻き取り操作が必要となっていた。しかしながら、繊細な巻き取り操作には熟練を要することから、ウインチの操作を簡単にすることが求められている。
【課題を解決するための手段】
【0005】
本開示によれば、第1車両に設けられる車両用制御装置は、動力源に連結されるドラムと、前記ドラムに巻かれるワイヤーロープと、を備えるウインチを有する。前記車両用制御装置は、互いに通信可能に接続されるプロセッサおよびメモリを備え、前記ウインチを制御する制御システムを有する。前記制御システムは、前記第1車両と他の第2車両とが前記ワイヤーロープを介して互いに連結されて且つ前記ドラムが回転している状態のもとで、前記第1車両と前記第2車両との相対的な傾斜角度が閾値を下回る場合に前記ドラムの回転を停止させる。
【発明の効果】
【0006】
本開示によれば、ウインチの操作を簡単にすることができる。
【図面の簡単な説明】
【0007】
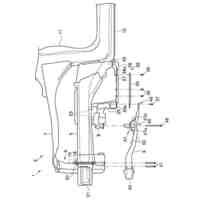
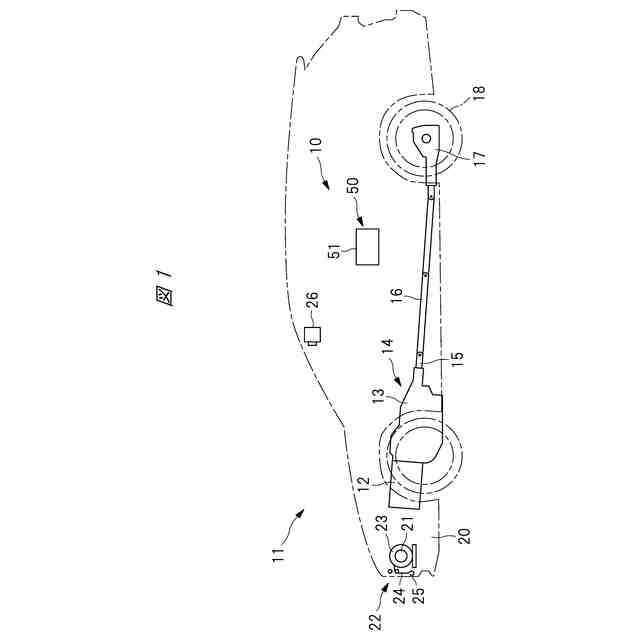
図1は、本開示の一実施形態である車両用制御装置を備えた車両の一例を示す図である。
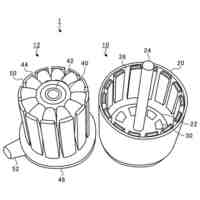
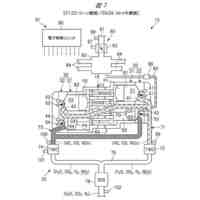
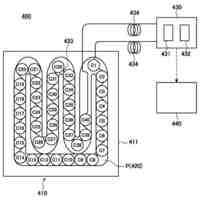
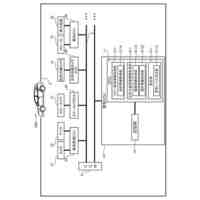
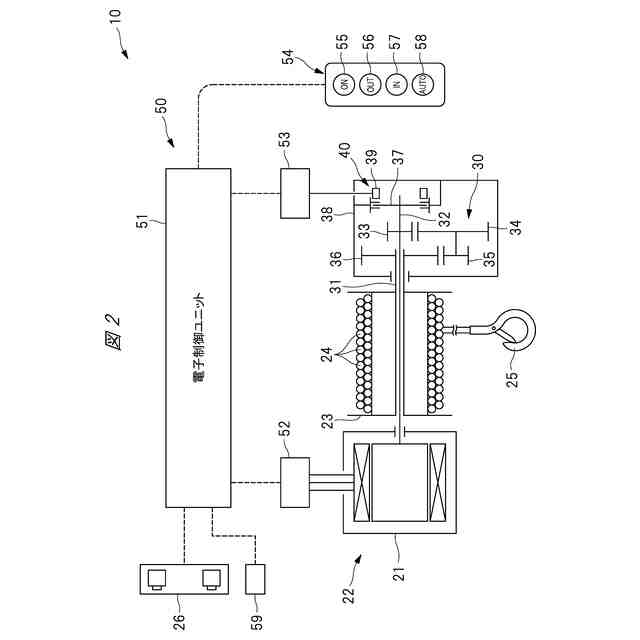
図2は、車両用制御装置を示す図である。
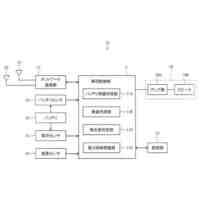
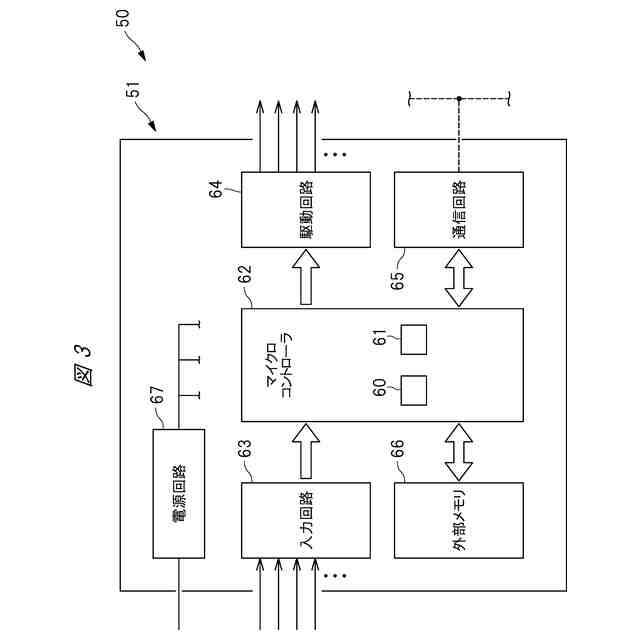
図3は、電子制御ユニットの基本構造の一例を示す図である。
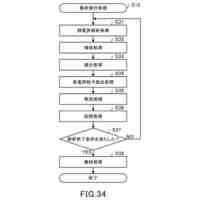
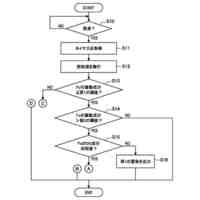
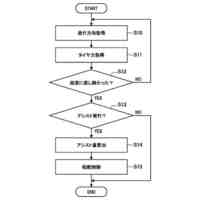
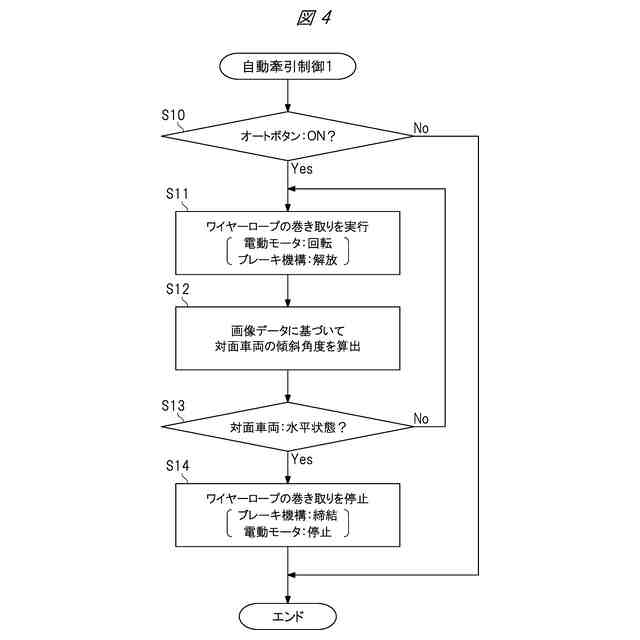
図4は、ワイヤーロープを自動的に巻き取る自動牽引制御1の実行手順の一例を示すフローチャートである。
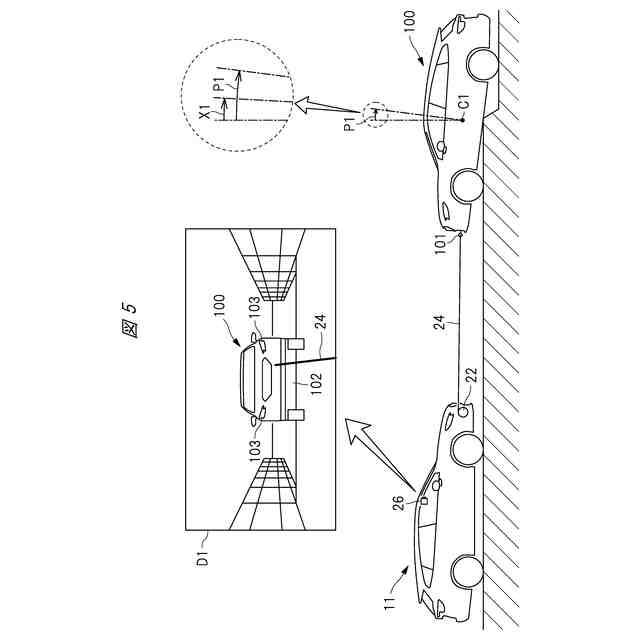
図5は、スタック車両の救出例を示す図である。
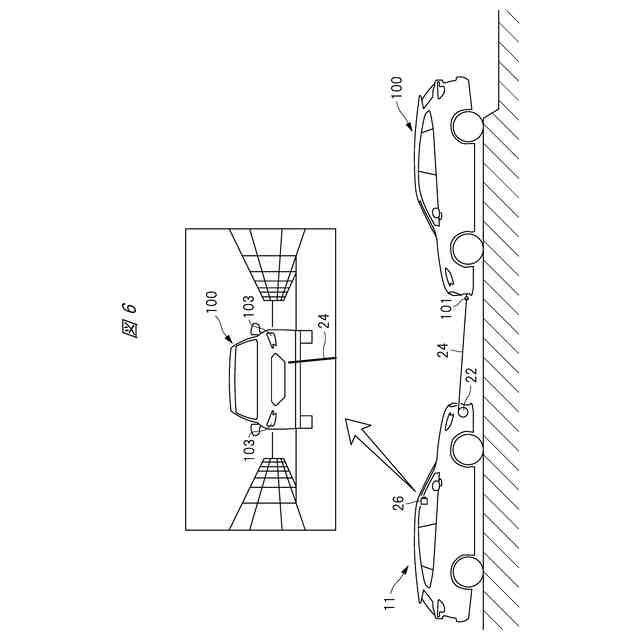
図6は、スタック車両の救出例を示す図である。
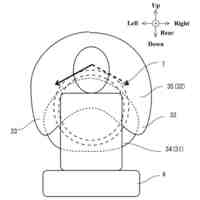
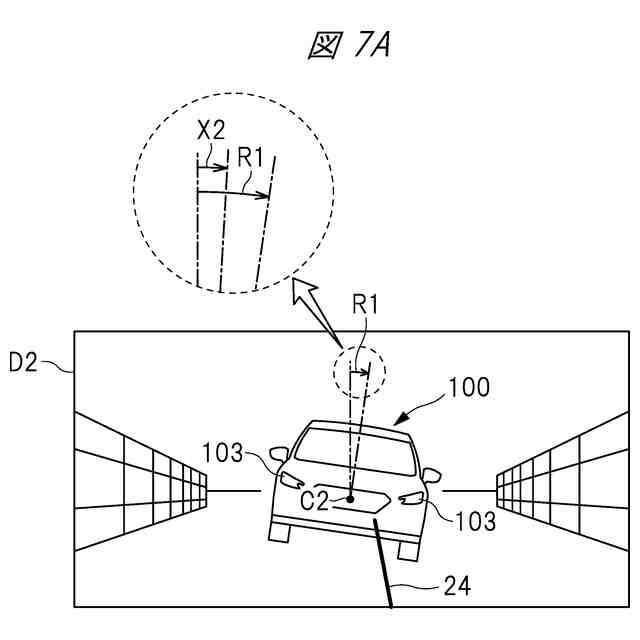
図7Aは、スタック車両の救出過程で得られる画像データの一例を示す図である。
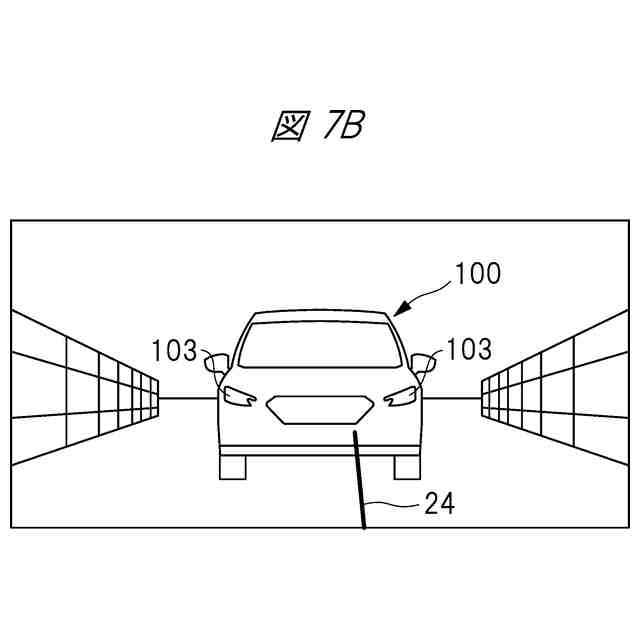
図7Bは、スタック車両の救出過程で得られる画像データの一例を示す図である。
図8は、ウインチ車両がスタックした状況の一例を示す図である。
図9は、本開示の他実施形態である車両用制御装置を示す図である。
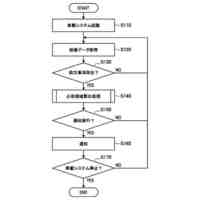
図10は、ワイヤーロープを自動的に巻き取る自動牽引制御2の実行手順の一例を示すフローチャートである。
図11は、スタック車両の救出例を示す図である。
【発明を実施するための形態】
【0008】
以下、本開示の実施形態を図面に基づいて詳細に説明する。なお、以下の説明において、同一または実質的に同一の構成や要素については、同一の符号を付して繰り返しの説明を省略する。
【0009】
<実施形態1>
<車両>
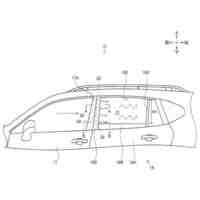
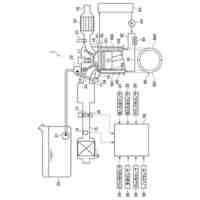
図1は本開示の一実施形態である車両用制御装置10を備えた車両11の一例を示す図である。図1に示すように、車両11は、エンジン12およびトランスミッション13からなるパワーユニット14を有している。パワーユニット14の出力軸15は、プロペラ軸16およびデファレンシャル機構17を介して車輪18に連結されている。なお、図示する車両11は、後輪駆動車であるが、これに限られることはなく、全輪駆動車または前輪駆動車であっても良い。
【0010】
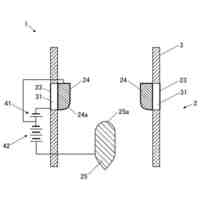
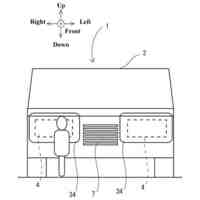
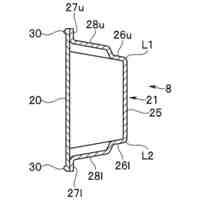
車両11の前部20には、電動モータ(動力源)21を備えたウインチ22が搭載されている。ウインチ22は、電動モータ21に連結されるドラム23と、ドラム23に巻かれるワイヤーロープ24と、を有している。また、ワイヤーロープ24の先端には、フック25が取り付けられている。さらに、車両11には、車両前方を撮像するフロントカメラ(カメラユニット)26が設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
4日前
株式会社SUBARU
車両
4日前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
モータ
1か月前
株式会社SUBARU
エンジン
3日前
株式会社SUBARU
解析装置
1か月前
株式会社SUBARU
潤滑構造
18日前
株式会社SUBARU
解析方法
29日前
株式会社SUBARU
エンジン
24日前
株式会社SUBARU
判定装置
1日前
株式会社SUBARU
容器ホルダ
24日前
株式会社SUBARU
無段変速機
26日前
株式会社SUBARU
情報提示装置
10日前
株式会社SUBARU
電池システム
25日前
株式会社SUBARU
運転支援装置
1日前
株式会社SUBARU
運転支援装置
1日前
株式会社SUBARU
運転支援装置
12日前
株式会社SUBARU
前部車体構造
25日前
株式会社SUBARU
車両用警告装置
22日前
株式会社SUBARU
エアバッグ装置
1か月前
株式会社SUBARU
車両用制御装置
23日前
株式会社SUBARU
通気管端部構造
18日前
株式会社SUBARU
車両用制御装置
5日前
株式会社SUBARU
エアバッグ装置
1か月前
株式会社SUBARU
車両用保護装置
1日前
株式会社SUBARU
車両用制御装置
1日前
株式会社SUBARU
エンジンシステム
18日前
株式会社SUBARU
バッテリ固定構造
1か月前
株式会社SUBARU
イオン風発生装置
1か月前
株式会社SUBARU
エンジン制御装置
1か月前
株式会社SUBARU
センサ位置決定方法
29日前
株式会社SUBARU
車両の車外保護装置
26日前
株式会社SUBARU
車両のバンパビーム
25日前
株式会社SUBARU
車両の乗員保護装置
24日前
株式会社SUBARU
車両の乗員保護装置
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ