TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130692
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2025006528
出願日
2025-01-17
発明の名称
対象物の干渉チェック方法
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20250901BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】点集合を使用する物体干渉チェック技術を提供する。
【解決手段】この技術は、物体のCADモデルを使用し、CADモデルを3Dの点集合に変換する。3Dの点の位置は、物体の動作に基づいて更新される。次に、3Dの点は、任意の物体又は障害物上の任意の点が占有する空間を画定する3Dグリッド空間指標に変換される。3Dグリッド空間指標は1D指標に変換され、1D指標は物体毎にかつ位置毎に保存される。複数の動作ステップにわたる1D指標のセットの和集合を計算することにより、物体の掃引体積が計算される。物体間の干渉チェックは、所与の動作ステップ又は位置の1D指標のセットの交差を計算することによって実行される。1D指標を3D座標に戻す変換がされ、掃引体積の3D形状及び干渉が定められる。
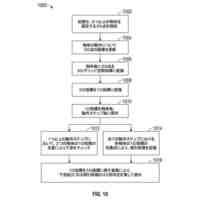
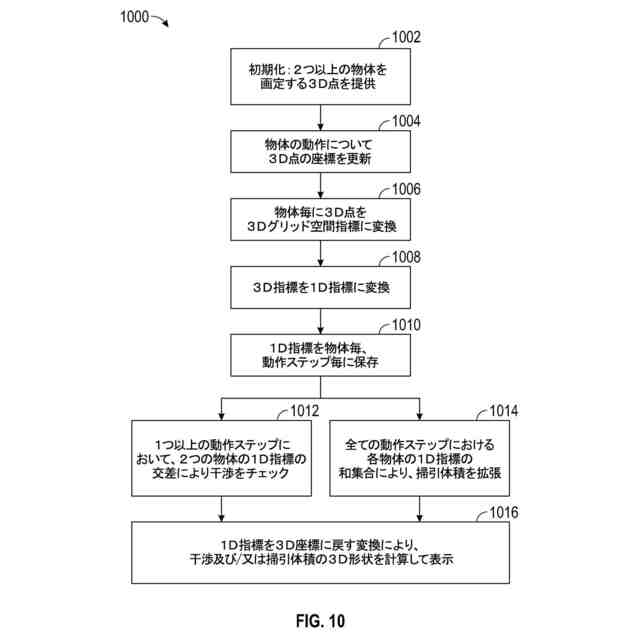
【選択図】図10
特許請求の範囲
【請求項1】
物体間の干渉をチェックする方法であって、
2つ以上の物体の各々によって占有される空間を規定する3次元(3D)点を、プロセッサ及びメモリを有する演算装置上で生成することと、
前記物体の3D点を、作業空間グリッドセルの占有率を規定する1次元(1D)指標に変換することと、
前記物体の前記3D指標を、前記物体の各々について、作業空間グリッドセルの占有率を規定する1D指標に変換することと、
前記1D指標を、前記物体の各々についてのセットとして保存することと、
前記物体の1つの前記1D指標のセットと前記物体の他の1つの前記1D指標のセットとの交差を、前記演算装置上で計算することにより、干渉チェックを行うことと、
を含む、方法。
続きを表示(約 1,000 文字)
【請求項2】
干渉条件が存在していることを非ヌル交差が示す、請求項1に記載の方法。
【請求項3】
前記干渉条件が存在しているときは干渉の体積を計算することをさらに含み、前記計算は、交差のセットの1D指標を3D指標に変換することと、前記3D指標を前記交差のセットの3D点に変換することとを含む、請求項2に記載の方法。
【請求項4】
前記物体の各々によって占有された区間を画定する前記3D点は、外表面上の点及び内部体積の点を含む点群である、請求項1に記載の方法。
【請求項5】
前記3D点を1D指標に変換することは、前記物体の各々の前記3D点を3D指標に変換し、前記物体の各々の前記3D指標を1D指標に変換することを含む、請求項1に記載の方法。
【請求項6】
前記3D点を3D指標に変換することは、グリッド空間の各次元について定義されたサイズを有する複数のセルを含む3D作業空間グリッド空間を規定することと、前記セルの各々に3D指標を割り当てることと、セル内の1つ以上の3D点の位置に基づいて、作業空間グリッドセルの占有率を定めることと、を含む、請求項5に記載の方法。
【請求項7】
前記セルの各々に3D指標を割り当てることは、グリッド空間の各次元でのセルの連続位置に基づいて、前記3D指標の各値を割り当てることを含む、請求項6に記載の方法。
【請求項8】
前記3D点を1D指標に変換することは、1D指標を連続する整数として割り当てることと、第2及び第3のグリッド空間次元を一定に保ちつつ第1のグリッド空間次元のカウントを完了することと、全ての3D指標が1D指標に割り当てられるまで、前記第2及び第3のグリッド空間次元を再帰的にインクリメントすることと、含む、請求項5に記載の方法。
【請求項9】
前記物体の前記3D点を1D指標に変換する前に、前記物体の少なくとも1つが新たな位置に移動する動作ステップに基づいて、前記3D点の座標を更新することをさらに含む、請求項1に記載の方法。
【請求項10】
前記3D点の前記座標を更新し、1つ以上の追加の動作ステップについて干渉チェックを実行することをさらに含む、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
(関連出願の相互参照)
本願は、2021年12月6日に提出され、タイトルを「POINT SET INTERFERENCE CHECK」とする米国仮出願第17/457777号(現在は米国特許第11878424号)の継続出願である、2023年12月14日に提出され、タイトルを「POINT SET INTERFERENCE CHECK METHOD AND SYSTEM」とする米国出願第18/540175号の一部継続出願である。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
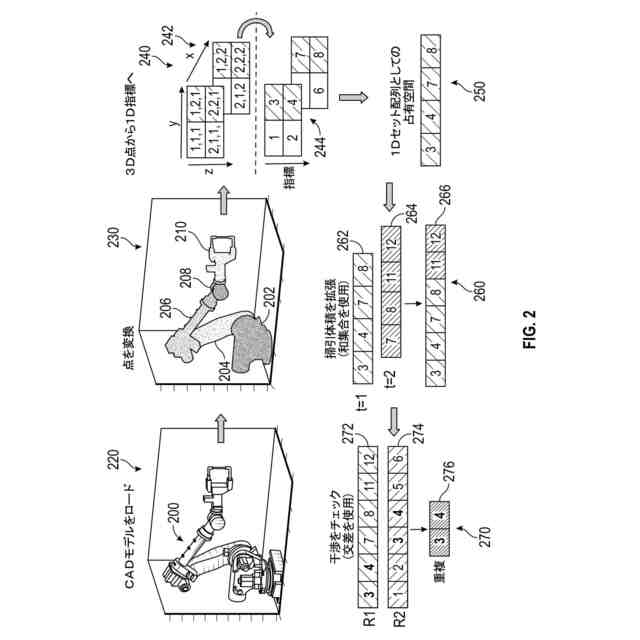
本開示は、広くは、産業用機械の動作制御の分野に関し、特には、対象物の干渉をチェックする技術に関する。この技術は、複数の対象物を点の集合(ポイントセット)として定義し、対象物の動作に基づいて3次元(3D)の点の集合を更新し、3Dの点を占有空間を示す3D指標に変換し、3D指標を1次元(1D)指標に変換し、1D指標を対象物毎及び動作ステップ毎のセットとして保存し、所与のステップのセットの交差によって干渉チェック計算を実行し、複数のステップにわたる組の和集合によって掃引体積計算(swept volume computation)を実行する。
【0003】
産業用ロボットを使用して、製造、組み立て、及び材料移動の操作を幅広く実行することはよく知られている。多くのロボットの作業空間環境には、障害物が存在しており、ロボットの動作の経路にある場合がある。障害物は、機械や固定具等の永続的な構造物、又は一時的若しくは可動のものであり得る。ロボットが作業している大型のワークは、ロボットが溶接等の操作を実行している間に該ワークの内部又は周りを移動する必要があるため、ワーク自体が障害物になり得る。複数のロボットの作業空間環境では、各ロボットは潜在的に他のロボットの障害物である。ロボットの任意の部分といかなる障害物との衝突も、絶対に避けなければならない。
【0004】
リアルタイムの動作計画中を含め、動作計画ルーチンに干渉チェックアルゴリズムを含めることが知られている。干渉チェックのための従来技術の一つは、ロボットの各アームの周り及び各障害物の周りに、球や円柱等の基本形状を定義することを含む。基本形状は、干渉チェック計算の複雑さを扱いやすいレベルに引き下げて、干渉チェック計算をリアルタイムの動作計画に十分な速さで実行できるようにするために使用される。しかし、各障害物及び各ロボットアームの周りに基本形状を定義することは、面倒で時間のかかるプロセスである。さらに、ロボットによって溶接又は塗装されている車体等のいくつかの物体は、基本形状を使用した近似に適していない。ロボットアーム自体でさえ、基本形状を使用して適切に近似されていないことが多く、伝統的な基本形状は、干渉状態の誤判定につながる可能性がある。
【0005】
干渉チェックのための別の従来技術は、ロボットアーム及び障害物のCADモデルを使用する。干渉チェック計算においてCADモデルを使用すれば、基本形状の不正確性の問題を回避できる。しかしこの方法では、1つのCADモデル(例えばロボットのエンドエフェクタ)上の全ての位置と、作業空間内の他の全ての潜在的な障害物(他の全てのロボットアーム部品、機械、固定具、ワーク等を含む)のCADモデル上の全ての位置との間の距離の計算及び干渉の検出が必要である。この計算は、計算機の負荷が大きく、最も単純なロボット作業空間環境を除く全ての環境で時間を要する。ロボットの動作中にリアルタイムで動作計画の計算を実行する必要がある環境では、殆どの場合、衝突回避の計算に時間がかかりすぎて実用的ではない。
【0006】
工作機械等の他の種類の移動対象物のための類似のチェック技術も、上記ロボットについて概説したものと同じ欠点及び制限を包含する。
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の状況に照らして、セットアップが容易でかつ、作業空間内の対象物及び障害物の数や種類に関係なく、対象物の干渉の可能性を迅速かつ正確に計算する、改善された対象物干渉チェック技術が望まれる。
【課題を解決するための手段】
【0008】
本開示の教示に従って、点の集合を使用した対象物干渉チェック技術が開示される。この技術では、複数の対象物のCADモデルを使用し、CADモデルを3次元(3D)の点に変換する。3D点の位置は、任意の対象物及び障害物の動作に基づいて更新される。3D点は次に、任意の対象物上の任意の点が占める空間を画定する3Dグリッド空間指標に変換される。次に3Dグリッド空間指標は、1次元(1D)の指標(インデックス)に変換され、1D指標は物体毎及び動作ステップ毎のセットとして保存される。複数の動作ステップにわたる1D指標のセットの和集合を計算することにより、対象物の掃引体積が生成される。所与の動作ステップ又は位置の1D指標の組の交差を計算することにより、複数の対象物間の干渉チェックが実行される。1D指標は3D座標に変換され、掃引体積の3D形状及び干渉の3D位置が定義される。
【0009】
開示された装置及び方法の追加の特徴は、添付の図面と併せて、以下の説明及び特許請求の範囲から明らかになるであろう。
【図面の簡単な説明】
【0010】
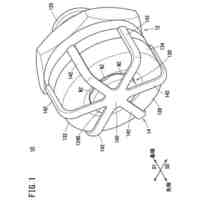
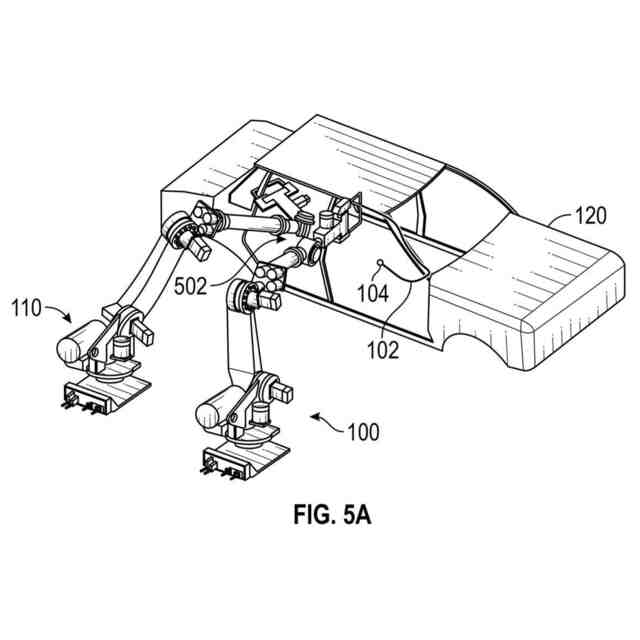
障害物である車体ワークの近くで作業する2つの産業用ロボットの図である。
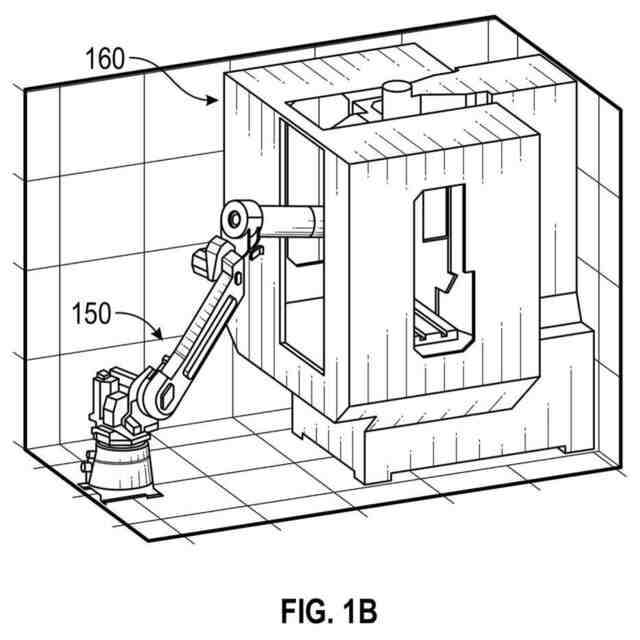
機械が障害物であるマシンテンディングアプリケーションにおける産業用ロボットの図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ファナック株式会社
対象物の干渉チェック方法
6日前
個人
固定補助具
23日前
個人
折りたたみ工具
6日前
株式会社ジャノメ
ロボット
2か月前
株式会社三協システム
製函機
4日前
CKD株式会社
把持装置
5日前
株式会社三協システム
移載装置
3日前
株式会社不二越
ロボット操作装置
11日前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
17日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
住友重機械工業株式会社
教示装置
2か月前
太陽パーツ株式会社
アシストスーツ
6日前
株式会社ミクロブ
把持装置
5日前
川崎重工業株式会社
ロボット
2か月前
日本精工株式会社
締結用工具
20日前
SMC株式会社
着脱装置
4日前
工機ホールディングス株式会社
作業機
2か月前
ARMA株式会社
ジョイントフレーム
18日前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
カプラ接続治具
27日前
株式会社不二越
ロボットシステム
3日前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
ロボットシステム
6日前
住友重機械工業株式会社
支援装置
2か月前
トヨタ自動車株式会社
歩行ロボット
9日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社マキタ
電気機器
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
ダイハツ工業株式会社
移載治具
18日前
大和ハウス工業株式会社
ねじ回転工具
4日前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
協働ロボットシステム
1か月前
SMC株式会社
ベルヌーイグリッパ
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ