TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025133076
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2025029548
出願日
2025-02-26
発明の名称
自動車を作動させる方法、コンピュータプログラム製品、記憶媒体、コンピュータ機構
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
主分類
B60W
30/00 20060101AFI20250903BHJP(車両一般)
要約
【課題】自動車を作動させる方法を提供する。
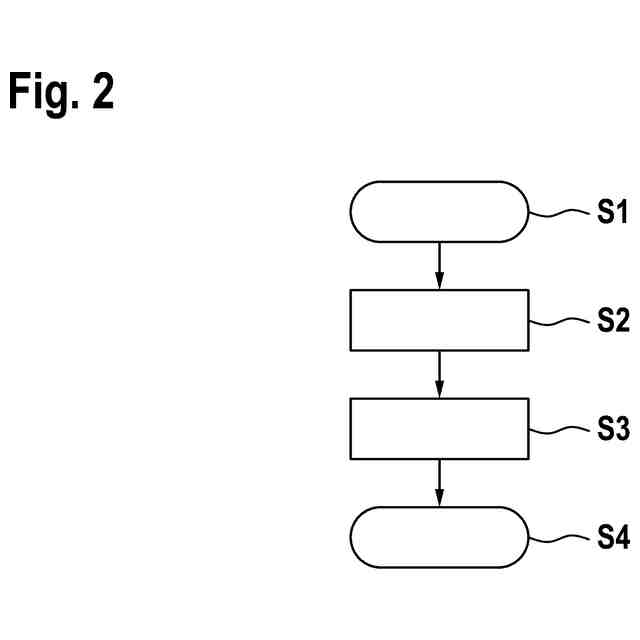
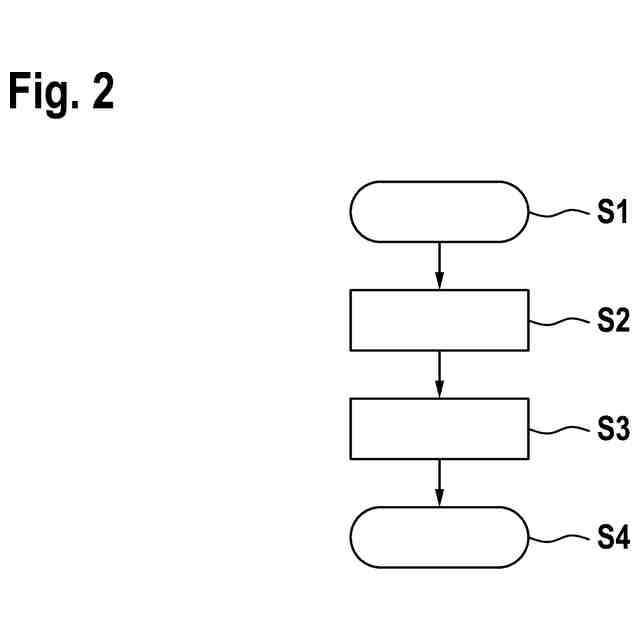
【解決手段】ステップS1で、加速要求または制動要求に応じて、アクチュエータに対するトルク目標値および回転数制限値を、特に中央の制御装置によって設定する。ステップS2で、生成可能なトルクに対し、ゼロトルクとトルク目標値との間に調整範囲を設定し、加速要求または制動要求を満たすように起動する。並行して、回転数実際値を検知し、回転数制限値と比較する。ステップS3で、ゼロトルクを越えてトルク目標値とは異なる符号を持つトルク制限値へ調整範囲内で起動する。好ましくは、回転数実際値が所定の公差以上に回転数制限値からずれている場合だけ、調整範囲を設ける。
【選択図】図2
特許請求の範囲
【請求項1】
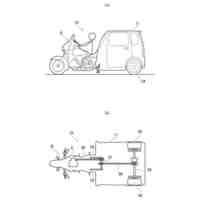
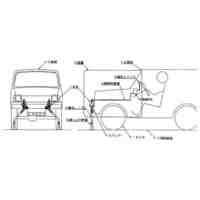
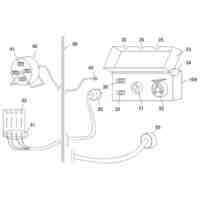
自動車(1)を作動させる方法であって、
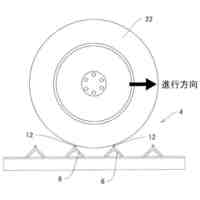
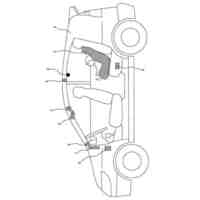
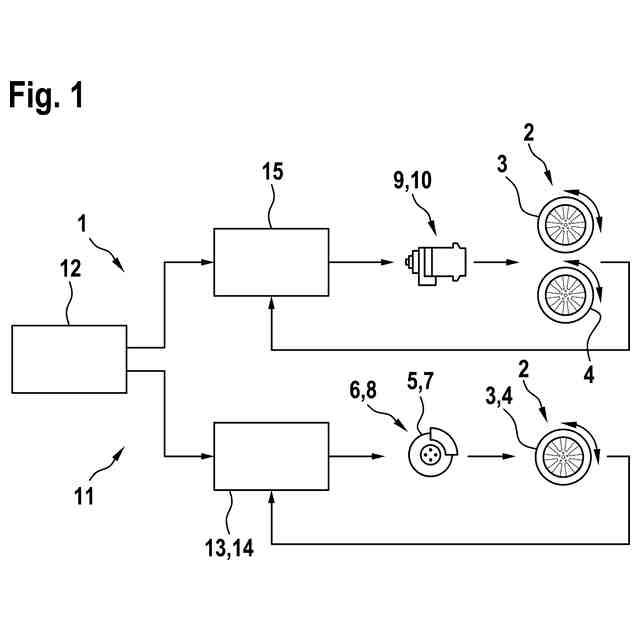
-前記自動車(1)が、少なくとも1つの車軸(2)と、少なくとも1つの車輪(3,4)とを有し、
-前記車輪(3,4)に、起動可能な第1のアクチュエータ(6,8)を備えた車輪ブレーキ装置(5,7)が、特に電気機械が付設され、
-前記車輪(3,4)に、起動可能な第2のアクチュエータ(10)を備えた駆動装置(9)が、特に電気機械が付設されている、
前記方法において、
-加速要求または制動要求に依存して、前記アクチュエータ(6,8,10)に対する少なくとも1つのトルク目標値と、回転数制限値(n
G
)とを設定すること、
-前記第2のアクチュエータ(10)によって生成可能なトルクに対し、ゼロトルクと前記トルク目標値との間に延在する第1の調整範囲を設定すること、
-前記第2のアクチュエータ(10)を、前記第1の調整範囲内で、加速要求または制動要求を満たすように起動させること、
-回転数実際値を検知して、前記回転数制限値(n
G
)と比較すること、
-前記比較によって、加速要求の際に前記回転数制限値(n
G
)を上回っていること、或いは、制動要求の際に前記回転数制限値(n
G
)を下回っていることが認定されれば、前記ゼロトルクを越えて前記トルク目標値とは異なる符号を持つトルク制限値へ延在する第2の調整範囲を提供し、その後前記第2の調整範囲内で前記第2のアクチュエータ(10)を起動させること、
を特徴とする方法。
続きを表示(約 1,100 文字)
【請求項2】
前記回転数実際値として、前記車輪(3,4)の車輪回転数の実際値および/または前記車軸(2)の車軸回転数の実際値を検知することを特徴とする、請求項1に記載の方法。
【請求項3】
前記回転数実際値が所定の公差を越えて前記回転数制限値(n
G
)からずれている場合だけ、前記第2の調整範囲を提供することを特徴とする、請求項1から2までのいずれか1項に記載の方法。
【請求項4】
前記第2の調整範囲を所定の時間だけ提供することを特徴とする、請求項1から3までのいずれか1項に記載の方法。
【請求項5】
前記時間内で所定の許可信号が認定されれば、前記第2の調整範囲の提供を前記所定の時間を越えて維持することを特徴とする、請求項4に記載の方法。
【請求項6】
前記許可信号を、前記第1のアクチュエータ(6,8)に付設されている制御機構(13,14)および/または中央の制御装置(12)によって生成させ、前記第2のアクチュエータ(10)の制御機構(15)へ送信し、および/または、前記第2のアクチュエータ(10)の制御機構(15)によって受信することを特徴とする、請求項5に記載の方法。
【請求項7】
前記回転数実際値が前記回転数制限値(n
G
)に少なくとも再び到達すれば、特に制動要求の際に前記回転数制限値(n
G
)を上回れば、或いは、加速要求の際に前記回転数制限値(n
G
)を下回れば、前記第2の調整範囲の提供を終了することを特徴とする、請求項1から6までのいずれか1項に記載の方法。
【請求項8】
前記トルク目標値および/または前記回転数制限値(n
G
)を中央の制御装置(12)によって設定することを特徴とする、請求項1から7までのいずれか1項に記載の方法。
【請求項9】
前記アクチュエータ(6,8,10)のそれぞれに、特に中央の制御装置(12)と通信技術的にそれぞれ結合されている固有の制御機構(13,14,15)が付設され、前記アクチュエータ(6,8,10)のそれぞれを、それにそれぞれ付設されている前記制御機構(13,14,15)によって起動させることを特徴とする、請求項1から8までのいずれか1項に記載の方法。
【請求項10】
コンピュータ機構で実行するためのコンピュータプログラム製品において、前記コンピュータプログラム製品が、規定どおりの使用で、請求項1から9までのいずれか1項に記載の方法を実施することを特徴とするコンピュータプログラム製品。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動車を作動させる方法であって、前記自動車が、少なくとも1つの車軸と、少なくとも1つの車輪とを有し、前記車輪に、起動可能な第1のアクチュエータを備えた車輪ブレーキ装置が、特に電気機械が付設され、前記車輪に、起動可能な第2のアクチュエータを備えた駆動装置が、特に電気機械が付設されている前記方法に関するものである。
続きを表示(約 4,700 文字)
【0002】
さらに、本発明はコンピュータプログラム製品に関し、すなわち当該コンピュータプログラム製品がコンピュータ機構で実行されるときに上記方法を実施する前記コンピュータプログラム製品に関する。さらに本発明は、この種のコンピュータプログラム製品を備えた機械読み取り可能な記憶媒体、および、前記コンピュータプログラム製品を実行するために、または、上記方法を実施するために特別に整備されているコンピュータ機構に関する。
【背景技術】
【0003】
従来技術から、電気駆動式自動車において、自動車を減速させるために、既存の電気駆動装置を利用すること、或いは、電気駆動装置を車輪ブレーキ装置と共に使用すること、または、車輪ブレーキ装置の代わりに使用することが知られている。その際、通常は、完全減速または最大減速に至るまでに、すなわち主に適当な路盤を通じて予め設定されている物理学的制限を完全に利用し尽くすような最大可能減速に至るまでに、駆動装置の介入が特に小さな摩擦値で行われる。
【発明の概要】
【0004】
請求項1の構成要件を備えた本発明による方法は、加速要求または制動要求に依存して、アクチュエータに対する少なくとも1つのトルク目標値と、回転数制限値とを設定すること、第2のアクチュエータによって生成可能なトルクに対し、ゼロトルクと前記トルク目標値との間に延在する第1の調整範囲を設定すること、前記第2のアクチュエータを、前記第1の調整範囲内で、加速要求または制動要求を満たすように起動させること、回転数実際値を検知して、前記回転数制限値と比較すること、前記比較によって、加速要求の際に前記回転数制限値を上回っていること、或いは、制動要求の際に前記回転数制限値を下回っていることが認定されれば、前記ゼロトルクを越えて前記トルク目標値とは異なる符号を持つトルク制限値へ延在する第2の調整範囲を提供し、その後前記第2の調整範囲内で前記第2のアクチュエータを起動させることを特徴としている。すなわち、本発明によれば、まず回転数制限値と関連してトルク目標値を設定することによって電気駆動装置を制御課題(加速または制動)に介入させる。制動要求の際に発生する回転数実際値(実際回転数)が回転数制限値(このとき回転数制限値は最小回転数を決定する)よりも上にある間、或いは、加速要求の際に回転数制限値(このとき回転数制限値は最大回転数を決定する)よりも下にある間、駆動装置の対応する第2のアクチュエータは所定のトルクにだけ追従する。特に、制動要求に対する第1の回転数制限値と、加速要求に対する第2の回転数制限値とを設定する。たとえば、制動要求の際にトルク目標値を発動させることによって回転数制限値に到達すれば、或いは、回転数制限値を下回れば、ただちに発生させるトルクを低減させ、この場合低減は特に制御回路によって行う。第1の調整範囲が設定されている間は、アクチュエータはゼロトルクの方向でのみトルク目標値と異なっていてよい。したがって、これに関連して、制動要求の際のトルク目標値を負のトルクとして定義すれば、アクチュエータは制動トルクのみを低減させることができるが、車輪または車軸の実際回転数を再び回転数制限値まで上げるために正の加速駆動トルクを作用させることはできない。制動要求に対する回転数制限値は、通常、ロック傾向が排除されているように選定されており、その結果下回れば、対応的にそれぞれの車輪がロックする危険がある。その際トルク目標値は、特に、自動車のドライバーによる、および/または、車両アシストシステムの設定による操作装置の操作に依存して、たとえばブレーキペダルの操作に依存して、たとえば緊急ブレーキの範囲内で生じる。加速要求の場合に対しては同じような制限が適用される。たとえば、加速要求の際にトルク目標値を発動させることによって回転数制限値に到達すれば、または、これを上回れば、ただちに発生させるトルクを低減させる。第1の調整範囲が設定されている間は、アクチュエータはゼロトルクの方向でのみトルク目標値と異なっていてよい。したがって、これに関連して、加速要求の際のトルク目標値を正の駆動トルクとして定義すれば、アクチュエータは駆動トルクのみを低減させることはできるが、車輪または車軸の実際回転数を再び回転数制限値以下に低下させるために負の制動トルクを作用させることはできない。このとき、車輪ブレーキ装置の第1のアクチュエータを補助的に起動させることが考えられるが、しかしこの場合、制動制御の走査時間は駆動制御に比較して通常はより長いことに留意すべきであり、車輪ブレーキ装置が実際に制動トルクを提供するまでに時間遅延がある(トングパワーを構築しているときの遅延と、ブレーキライニングがブレーキディスクに当接するまでの遅延)。場合によっては車輪ブレーキ装置の補助のもとに前述の第1の調整範囲を使用することは、一般的な走行作動においては、所定の回転数制限値を下回ることまたは上回ることが許容時間内で再び修正されることを保証するには十分である。しかしながら、特に摩擦値の変化が急激であったり、急に高トルクに対する要求があったりするような走行状況においては、回転数設定が比較的長い時間維持されないことが起こり得る。これは、電気駆動装置の制御回路が当初は前述の第1の調整範囲に限定されており、回転数差を阻止するようなトルクが作用できないことによって説明がつく。車輪ブレーキ装置は常に車輪の運動方向とは逆方向のトルクしか発生させることができないので、車輪回転数が正の場合、常に負の制動トルクが生じ、すなわち車輪ブレーキ装置は車輪加速という課題に対しては使用できず、車輪減速のためだけに使用できる。第1の調整範囲に限定すれば、車輪加速に対してはタイヤの長手方向の力だけが有効であるが、タイヤの長手方向の力は路盤に依存しており、特に低摩擦値の路盤に対しては非常に小さい。これにより可能な車輪加速も小さく、また制限されており、したがって所定の回転数を下回る時間が大きくなることがある。車輪減速が必要である事例に対しては、すでに述べたように、基本的にはブレーキを利用できるが、しかしそれによって、ブレーキの投入を時間的に正確に整合させないと、場合によってはパワートレインに機械的な緊張を発生させる。というのは、そうしないと駆動と制動とが互いに逆方向のトルクを提供するからである。これにより、予め設定されている回転数制限値を下回る時間(制動の場合)または上回る時間(駆動の場合)は車両の走行動的状態に直接影響するので、特に操舵性および横方向安定性が短時間失われることがある。このような状況は本発明によって解消され、回転数が回転数デフォルト値に従う時間が劇的に短くなるので有利である。これによって、前述の状況における操舵性も横方向安定性も著しく改善される。前述の利点は、本発明によれば、その都度の回転数制限値に対する回転数実際値の前述のずれが認定されれば、その都度有効なトルク目標値とは異なる符号を持つトルクの提供を許容する第2の調整範囲を設けることによって達成され、その結果駆動装置により、制動要求時には正の駆動トルクをも提供でき、加速要求時には負の制動トルクも提供できる。これは、対応的に、第2の調整範囲内で第2のアクチュエータを起動することによって発生する。第2の調整範囲は、特に、第1の調整範囲を直接拡大したものであり、および/または、少なくとも所定時間これを補う。たとえば、第1の調整範囲から第2の調整範囲へ交替させ、このとき第2の調整範囲はトルク目標値からトルク制限値まで延在し、すなわち符号の変化を含む範囲まで延在している。このとき、回転数実際値が回転数制限値を再び上回るまで(制動要求)、或いは、下回るまで(加速要求)、回転数実際値を回転数制限値に再び接近させる目的で前記起動を行う。
【0005】
本発明の有利な更なる構成によれば、回転数実際値として、車輪の車輪回転数の実際値および/または車軸の車軸回転数の実際値を検知することが企図されている。これによって、駆動装置が制御課題に最適に結び付けられていることが確保されているので有利である。好ましくは、車軸駆動の場合には車軸回転数の実際値を検知し、単独車輪駆動の場合にはそれぞれの車輪回転数の実際値を検知する。
【0006】
特に有利には、回転数実際値が所定の公差を越えて回転数制限値からずれている場合だけ、第2の調整範囲を設けることが企図されている。これによって、本発明による方法の効率が有利に向上しているという利点が生じる。というのは、どんなわずかなずれがあっても、すなわち下回っている、または、上回っていることがあっても、第2の調整範囲が提供されて対応的に起動が適用されるわけではないからである。
【0007】
本発明の有利な更なる構成によれば、第2の調整範囲を所定の時間だけ提供することが企図されている。これによって、たとえば制御の機能不良のために走行安全性が阻害されないことが確保されているので有利である。というのは、ゼロトルクを対応的に上回ることまたは下回ることは所定の時間だけしか許されないからである。すなわち、それぞれ正の範囲(制動要求)または負の範囲(加速要求)への調整範囲の短時間の拡大のみが行われるが、この短時間の拡大は所定時間の後すぐに対応するゼロトルクへ減少されねばならない。特に、時間は秒範囲または秒の端数の範囲で設けられ、たとえば0.5秒以下、または、1秒以下で設けられている。
【0008】
特に有利には、前記時間内で所定の許可信号が認定されれば、第2の調整範囲の提供を所定の時間を越えて維持することが企図されている。これにより、走行安全性を常に保証するために、第2の調整範囲の提供を外部の許可信号によって有効とするという利点が生じる。許可信号が認定されれば、対応するトルクをゼロトルクへ低減させる必要はなく、第2の調整範囲内で調整すればよい。たとえば、それぞれの車輪における車輪スリップおよび/またはトルクの実際値に依存して、対応する許可信号を生成させる。
【0009】
本発明の有利な更なる構成によれば、許可信号を、第1のアクチュエータに付設されている制御機構および/または中央の制御装置によって生成させ、第2のアクチュエータの制御機構へ送信し、および/または、第2のアクチュエータの制御機構によって受信することが企図されている。このような処置態様により、許可信号を独立に外部で生成して処理することが確保されているので有利であり、その結果本発明による方法の保全性がさらに改善されている。
【0010】
特に有利には、回転数実際値が回転数制限値に少なくとも再び到達すれば、特に制動要求の際に回転数制限値を上回れば、或いは、加速要求の際に回転数制限値を下回れば、第2の調整範囲の提供を終了することが企図されている。これにより、第2の調整範囲は走行安定性を確保するためにも必要とされるような期間しか提供されないので、本発明による方法の効率がさらに改善されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
車窓用防虫網戸
4か月前
個人
前輪キャスター
17日前
個人
タイヤ脱落防止構造
14日前
個人
車輪清掃装置
3か月前
個人
ホイルのボルト締結
2か月前
個人
ルーフ付きトライク
1か月前
個人
車両通過構造物
1か月前
井関農機株式会社
作業車両
3か月前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
24日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
3か月前
個人
乗合路線バスの客室装置
1か月前
個人
キャンピングトレーラー
2か月前
個人
車両用スリップ防止装置
2か月前
個人
アクセルのソフトウェア
2か月前
個人
ワイパーゴム性能保持具
3か月前
個人
車載小物入れ兼雨傘収納具
2か月前
株式会社ニフコ
照明装置
22日前
個人
円湾曲ホイール及び球体輪
1か月前
株式会社ニフコ
収納装置
2日前
井関農機株式会社
収穫作業車両
4か月前
日本精機株式会社
車載表示装置
2か月前
個人
音声ガイド、音声サービス
1か月前
株式会社ニフコ
保持装置
2か月前
株式会社クラベ
ヒータユニット
3か月前
株式会社豊田自動織機
産業車両
1か月前
日本精機株式会社
車室演出装置
14日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用投影装置
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ