TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135226
公報種別
公開特許公報(A)
公開日
2025-09-18
出願番号
2024032940
出願日
2024-03-05
発明の名称
情報処理装置、情報処理方法、及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/246 20240101AFI20250910BHJP(制御;調整)
要約
【課題】
作業の種別に応じた起動位置姿勢を算出可能な情報処理装置を提供することを目的とする。
【解決手段】
情報処理装置において、移動体による作業の種別と、作業領域に関する情報と、事前に作成した自己位置推定用の地図情報を取得する作業設定情報取得手段と、前記作業の種別と、前記作業領域と、前記地図情報に基づいて、前記作業を開始する際の起動位置姿勢を算出する起動位置姿勢算出手段と、を有することを特徴とする。
【選択図】 図3
特許請求の範囲
【請求項1】
移動体による作業の種別と、作業領域に関する情報と、事前に作成した自己位置推定用の地図情報を取得する作業設定情報取得手段と、
前記作業の種別と、前記作業領域と、前記地図情報に基づいて、前記作業を開始する際の起動位置姿勢を算出する起動位置姿勢算出手段と、
を有することを特徴とする情報処理装置。
続きを表示(約 760 文字)
【請求項2】
前記起動位置姿勢算出手段は、複数の起動位置姿勢候補の夫々に対応するキーフレームに含まれる特徴点の数と分布に基づいて起動位置姿勢候補の評価を行うことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記起動位置姿勢算出手段により算出された、前記作業を開始する際の前記起動位置姿勢を所定の端末に通知することを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記起動位置姿勢算出手段は、複数の起動位置姿勢候補の夫々について優先度を設定することを特徴とする請求項1に記載の情報処理装置。
【請求項5】
前記起動位置姿勢算出手段は、少なくとも前記優先度に基づいて前記起動位置姿勢を決定することを特徴とする請求項4に記載の情報処理装置。
【請求項6】
前記起動位置姿勢算出手段は、前記作業の種別に基づいて前記優先度を設定することを特徴とする請求項4に記載の情報処理装置。
【請求項7】
前記起動位置姿勢算出手段は、前記作業領域の形状又は配置又は移動パターンに基づいて前記優先度を設定することを特徴とする請求項4に記載の情報処理装置。
【請求項8】
前記起動位置姿勢算出手段は、前記移動体の前記起動位置姿勢に基づいて前記優先度を設定することを特徴とする請求項4に記載の情報処理装置。
【請求項9】
前記地図情報は、SLAMを用いて作成したものであることを特徴とする請求項1に記載の情報処理装置。
【請求項10】
前記地図情報は、測距センサから取得した点群データに基づく点群特徴情報を含むことを特徴とする請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法、及びコンピュータプログラム等に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
工場や倉庫で使用される無人搬送車や商業施設で使用される自律移動床清掃ロボットのように、各種センサから取得したデータに基づいて自己位置姿勢を推定し自律走行して所定の作業を実現する自律移動体が一般に用いられている。
【0003】
自律移動体が清掃や搬送といった作業を実施する際、作業領域の他に侵入禁止領域が指定される場合がある。この様な場合において、作業領域と自律移動体の走行禁止領域の関係から作業を開始する地点を決定する手法が提案されている。
【先行技術文献】
【特許文献】
【0004】
特表2023-501831号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の手法では自己位置推定開始時に、現在の位置姿勢が地図上のどの位置姿勢であるかを推定するための自己位置推定に失敗し、作業を開始できないという課題が発生する場合がある。
【0006】
本発明は、作業の種別に応じた起動位置姿勢を算出可能な情報処理装置を提供することを目的の1つとする。
【課題を解決するための手段】
【0007】
本発明の1側面の情報処理装置は、
移動体による作業の種別と、作業領域に関する情報と、事前に作成した自己位置推定用の地図情報を取得する作業設定情報取得手段と、
前記作業の種別と、前記作業領域と、前記地図情報に基づいて、前記作業を開始する際の起動位置姿勢を算出する起動位置姿勢算出手段と、
を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、作業の種別に応じた起動位置姿勢を算出可能な情報処理装置を実現できる。
【図面の簡単な説明】
【0009】
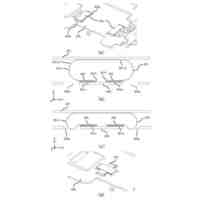
本発明の実施形態1に係る情報処理装置を搭載する移動体200の利用シーンイメージ図である。
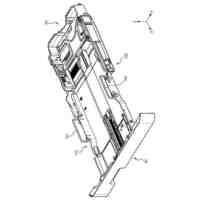
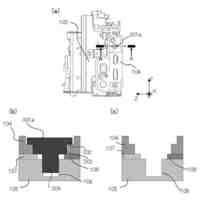
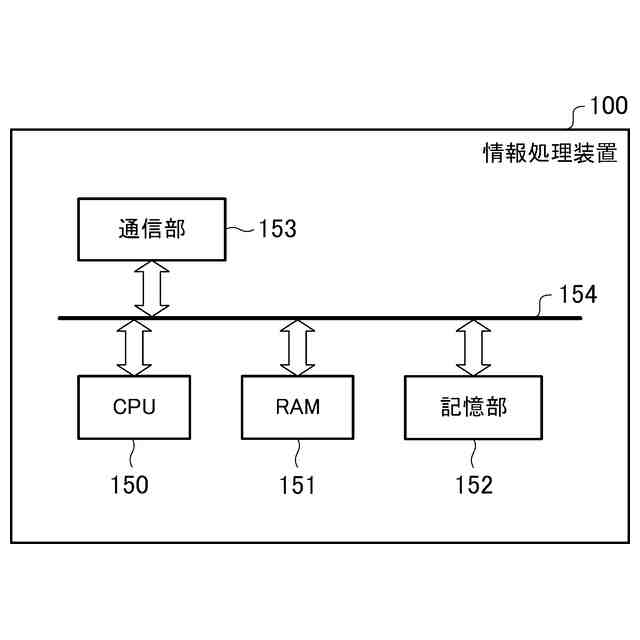
実施形態1に係る情報処理装置100のハードウェア構成例を示す図である。
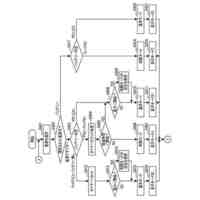
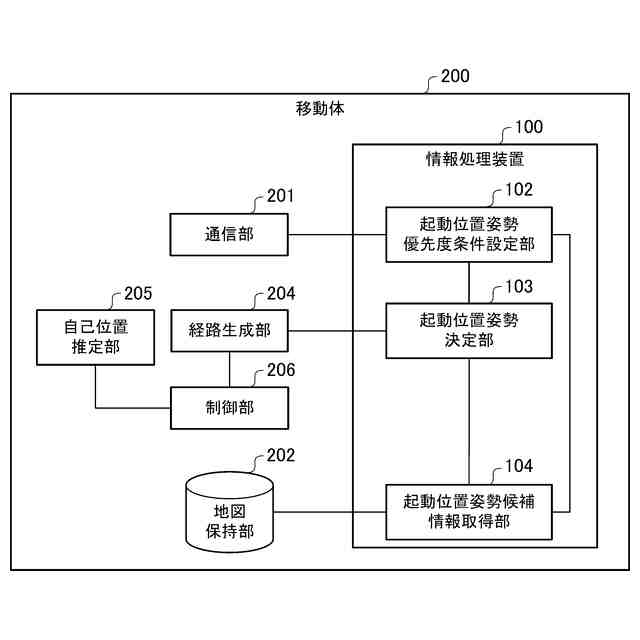
実施形態1に係る情報処理装置100と、情報処理装置100を搭載した移動体200の論理的な構成例を示す機能ブロック図である。
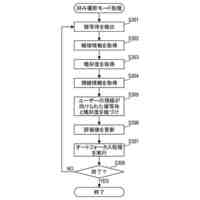
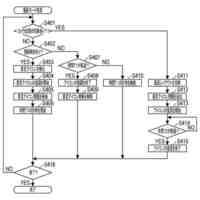
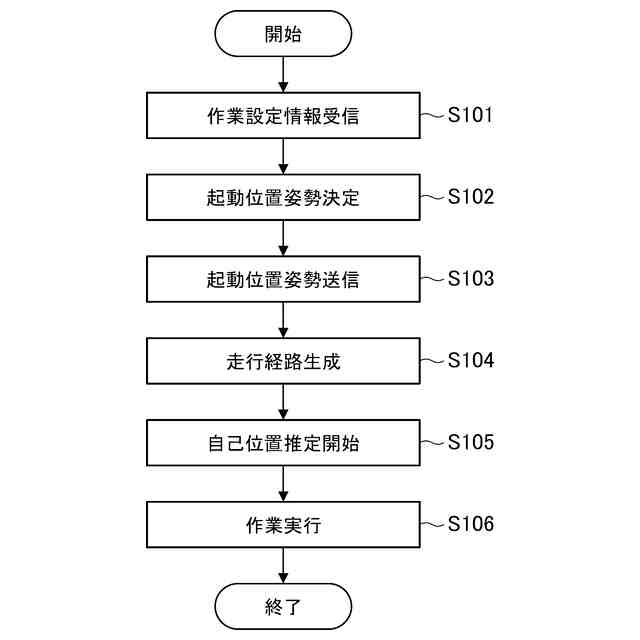
実施形態1に係る情報処理装置を用いた情報処理方法の処理例を示すフローチャートである。
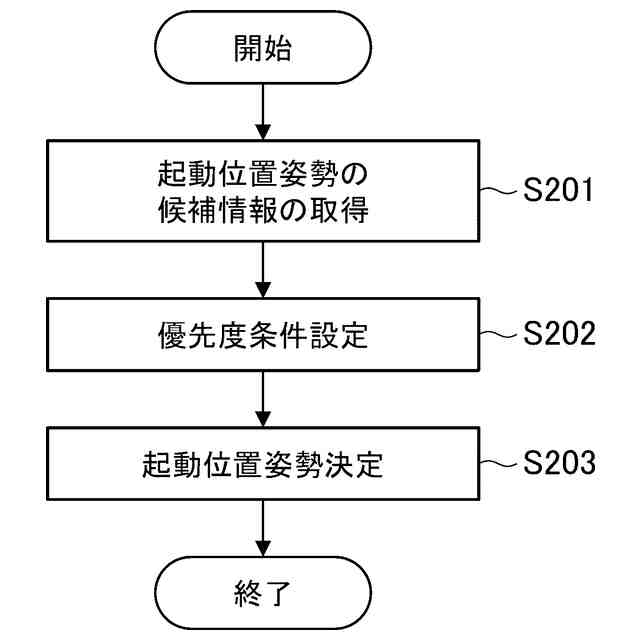
実施形態1に係る情報処理方法における起動位置姿勢を決定する処理例を示すフローチャートである。
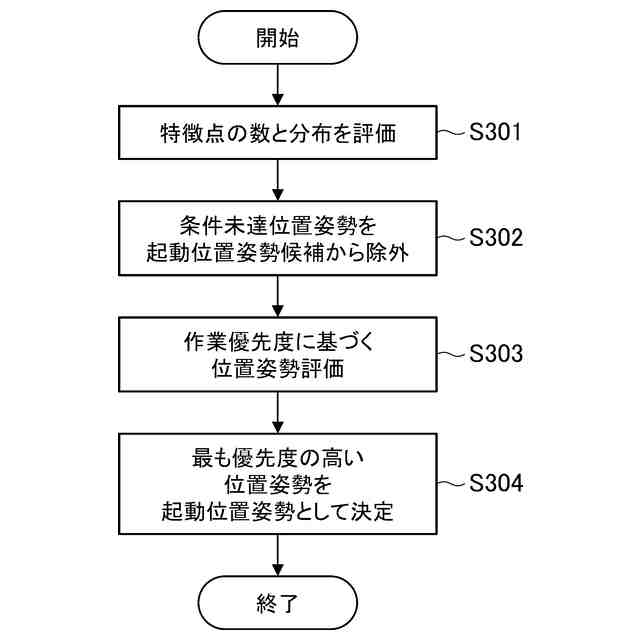
実施形態1における起動位置姿勢を決定するステップS203の詳細な例を示したフローチャートである。
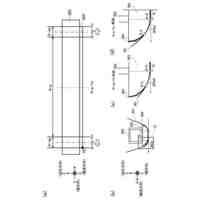
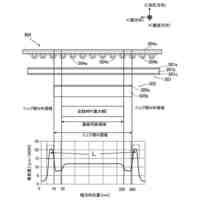
実施形態4においてLiDARによって作成した占有格子地図の例を示す図である。
実施形態4における起動位置姿勢決定(ステップS203)の処理例を詳細に説明したフローチャートである。
実施形態5における操作画面例を示した図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。ただし、本発明は以下の実施形態に限定されるものではない。なお、各図において、同一の部材または要素については同一の参照番号を付し、重複する説明は省略または簡略化する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
トナー
27日前
キヤノン株式会社
発光装置
3日前
キヤノン株式会社
電子機器
27日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
定着装置
10日前
キヤノン株式会社
撮像装置
24日前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
光学装置
24日前
キヤノン株式会社
現像装置
27日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
定着装置
4日前
キヤノン株式会社
収容装置
4日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
表示装置
3日前
キヤノン株式会社
電子機器
19日前
キヤノン株式会社
電子機器
21日前
キヤノン株式会社
発光装置
1か月前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
定着装置
19日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
記録装置
11日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
光学機器
1か月前
キヤノン株式会社
定着装置
19日前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
定着装置
19日前
キヤノン株式会社
記録装置
12日前
キヤノン株式会社
電子機器
12日前
キヤノン株式会社
容器構造体
1か月前
キヤノン株式会社
容器構造体
1か月前
キヤノン株式会社
画像表示装置
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ