TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136040
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034205
出願日
2024-03-06
発明の名称
非接触充電制御装置
出願人
トヨタ自動車株式会社
,
新電元工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H02J
50/90 20160101AFI20250911BHJP(電力の発電,変換,配電)
要約
【課題】ファインポジショニングの後に車両の地上高が変動した場合でも、充電直前のアライメントチェックで誤判定するのを抑制できる非接触充電制御装置を提供すること。
【解決手段】本発明の非接触充電制御装置は、駐車中の受電ユニットと送電ユニットとの位置合わせを、受電ユニットと送電ユニットとの位置ずれ量を検知する検知手段の検知結果に基づいて行うファインポジショニングでの判定に用いる第1の判定閾値と、ファインポジショニングよりも後であって充電直前の受電ユニットと送電ユニットとの位置合わせチェックを、検知手段の検知結果に基づいて行うアライメントチェックでの判定に用いる第2の判定閾値と、を有し、第1の判定閾値は、第2の判定閾値-車両の地上高変動での誤差縮まりしろ、に設定し、第2の判定閾値は、車両の地上高変動なしでの検知手段の検知誤差を考慮した値に設定する。
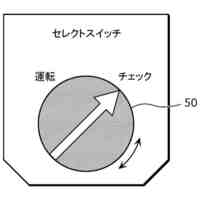
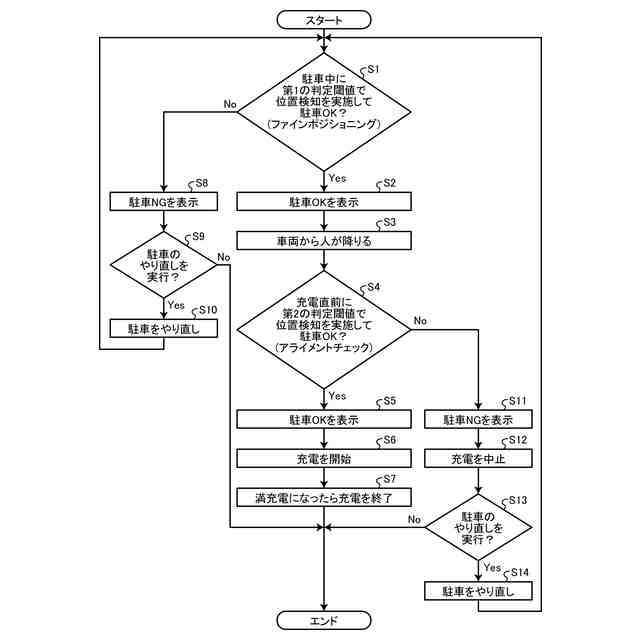
【選択図】図5
特許請求の範囲
【請求項1】
車両外部に設けられる給電設備の送電ユニットから送出される電力を受電ユニットにより非接触で受電して蓄電装置に蓄電可能な車両が備える非接触充電制御装置であって、
駐車中の前記受電ユニットと前記送電ユニットとの位置合わせを、前記受電ユニットと前記送電ユニットとの位置ずれ量を検知する検知手段の検知結果に基づいて行うファインポジショニングでの判定に用いる第1の判定閾値と、
前記ファインポジショニングよりも後であって充電直前の前記受電ユニットと前記送電ユニットとの位置合わせチェックを、前記検知手段の検知結果に基づいて行うアライメントチェックでの判定に用いる第2の判定閾値と、
を有し、
前記第1の判定閾値は、前記第2の判定閾値-前記車両の地上高変動での誤差縮まりしろ、に設定し、
前記第2の判定閾値は、前記車両の地上高変動なしでの前記検知手段の検知誤差を考慮した値に設定する、
ことを特徴する非接触充電制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、非接触充電制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、地上高検出センサの出力に応じて予め定められた、受電ユニットと送電ユニットとの間の距離と受電状況との関係を用いて、送電ユニットと受電ユニットとの位置合わせを行う、車両の駐車支援装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第4868093号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
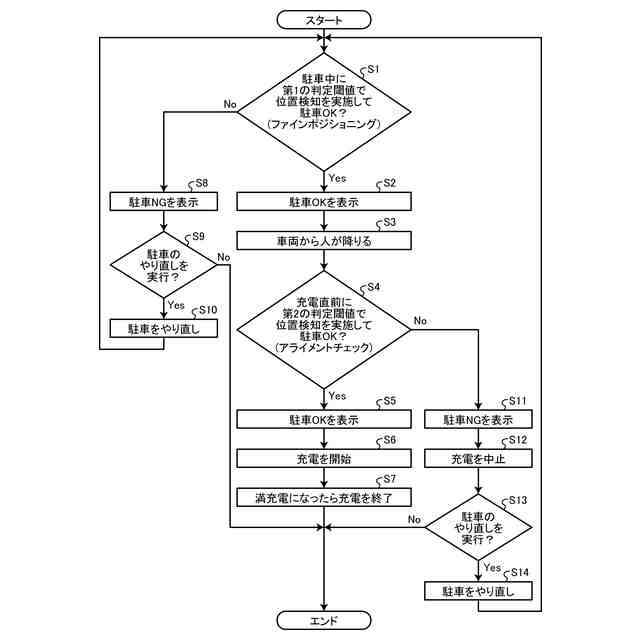
しかしながら、特許文献1に開示された車両の駐車支援装置では、駐車中の送電ユニットと受電ユニットとの位置合わせ確認であるファインポジショニングの後に、人の乗り降りや荷物の積み降ろしなどによって車両の地上高が変動した場合、充電直前の前記位置合わせ確認であるアライメントチェックで誤判定する虞がある。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、ファインポジショニングの後に車両の地上高が変動した場合でも、充電直前のアライメントチェックで誤判定するのを抑制できる非接触充電制御装置を提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る非接触充電制御装置は、車両外部に設けられる給電設備の送電ユニットから送出される電力を受電ユニットにより非接触で受電して蓄電装置に蓄電可能な車両が備える非接触充電制御装置であって、駐車中の前記受電ユニットと前記送電ユニットとの位置合わせを、前記受電ユニットと前記送電ユニットとの位置ずれ量を検知する検知手段の検知結果に基づいて行うファインポジショニングでの判定に用いる第1の判定閾値と、前記ファインポジショニングよりも後であって充電直前の前記受電ユニットと前記送電ユニットとの位置合わせチェックを、前記検知手段の検知結果に基づいて行うアライメントチェックでの判定に用いる第2の判定閾値と、を有し、前記第1の判定閾値は、前記第2の判定閾値-前記車両の地上高変動での誤差縮まりしろ、に設定し、前記第2の判定閾値は、前記車両の地上高変動なしでの前記検知手段の検知誤差を考慮した値に設定する、ことを特徴するものである。
【発明の効果】
【0007】
本発明に係る非接触充電制御装置は、ファインポジショニングの後に車両の地上高が変動した場合でも、充電直前のアライメントチェックで誤判定するのを抑制できるという効果を奏する。
【図面の簡単な説明】
【0008】
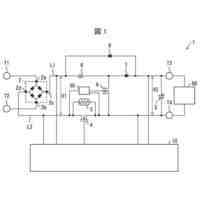
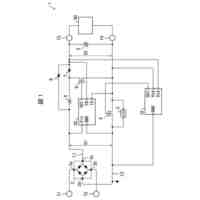
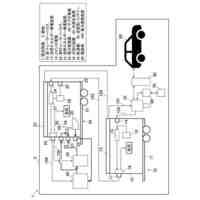
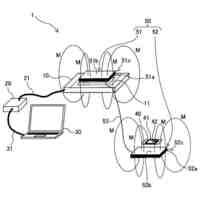
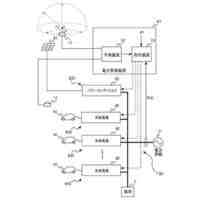
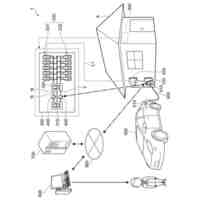
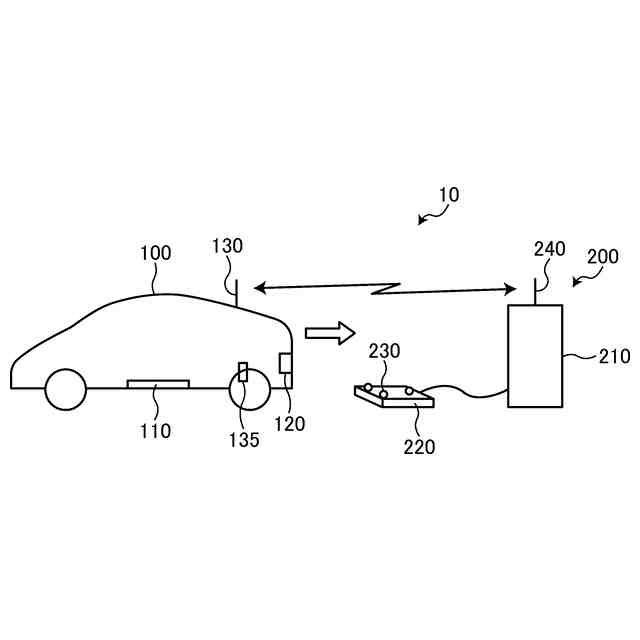
図1は、実施形態に係る非接触充電制御装置が適用される車両給電システムの全体構成図である。
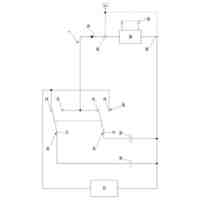
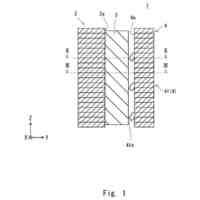
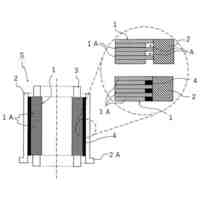
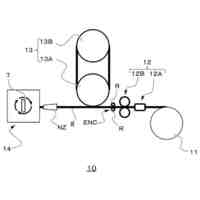
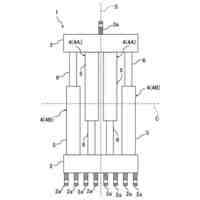
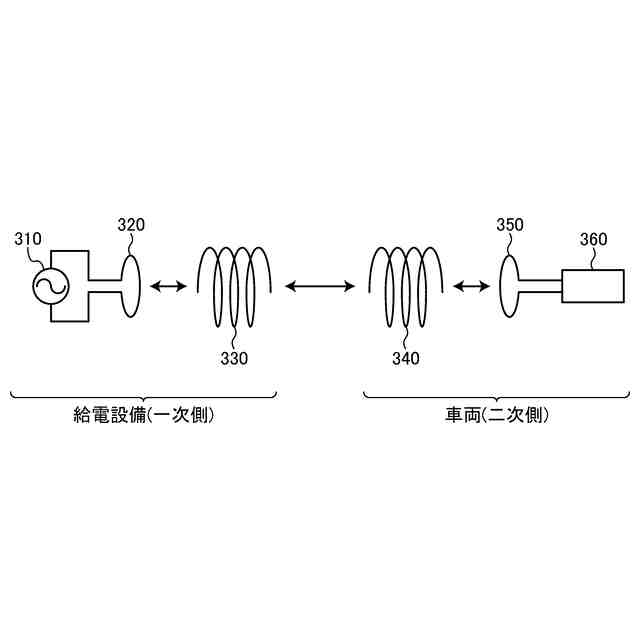
図2は、共鳴法による送電の原理を説明するための図である。
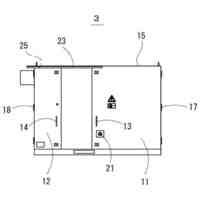
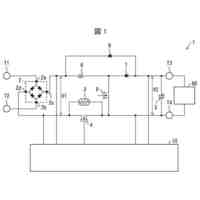
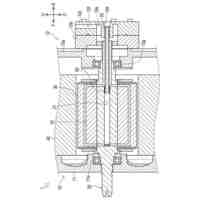
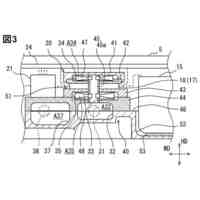
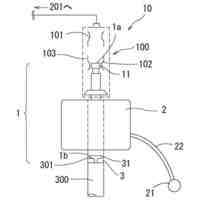
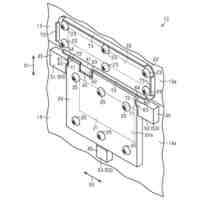
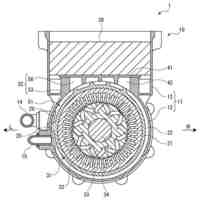
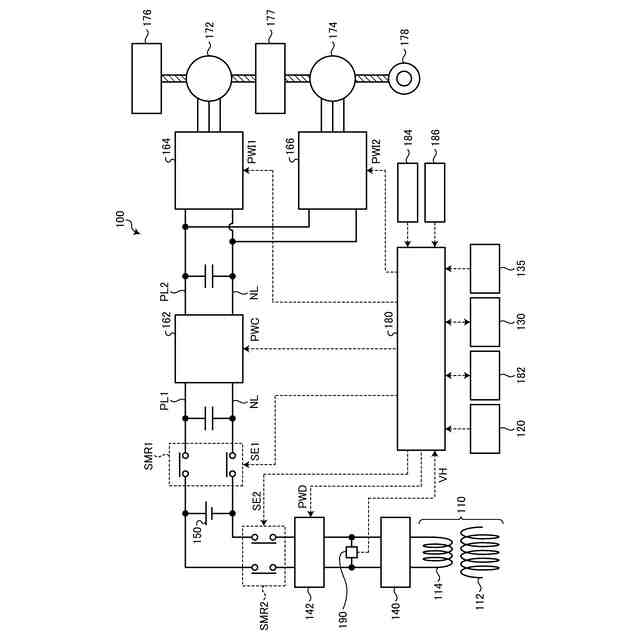
図3は、車両の詳細構成図である。
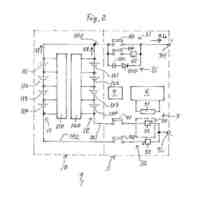
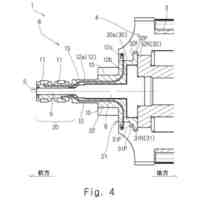
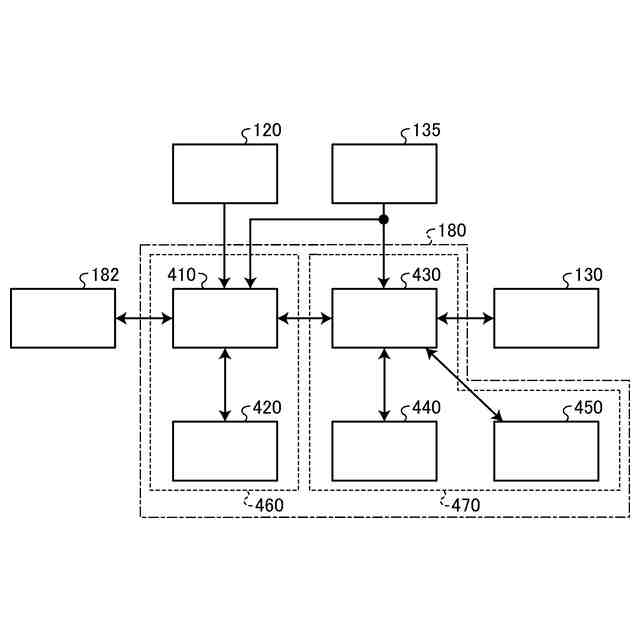
図4は、制御装置の機能ブロック図である。
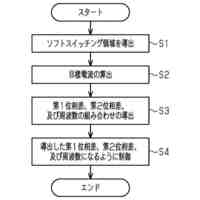
図5は、実施形態に係る制御装置によって実行される非接触充電制御の手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に、本発明に係る非接触充電制御装置の実施形態について説明する。なお、本実施形態により本発明が限定されるものではない。
【0010】
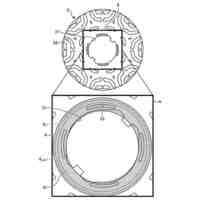
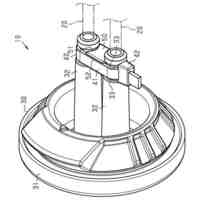
図1は、実施形態に係る非接触充電制御装置が適用される車両給電システム10の全体構成図である。実施形態に係る車両給電システム10は、車両100と車両外部に設けられる給電設備200とを備える。車両100は、受電ユニット110、カメラ120、通信部130、ハイトセンサ135、及び、非接触充電制御装置である制御装置180(図3参照)などを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電源装置
17日前
個人
バッテリ内蔵直流電源
16日前
株式会社FUJI
制御盤
6日前
オムロン株式会社
電源回路
10日前
オムロン株式会社
電源回路
10日前
オムロン株式会社
電源回路
10日前
トヨタ自動車株式会社
回転子
17日前
トヨタ自動車株式会社
回転子
2日前
ニデック株式会社
モータの制御方法
24日前
大豊工業株式会社
モータ
16日前
東京応化工業株式会社
発電装置
10日前
ミサワホーム株式会社
居住設備
6日前
株式会社リコー
拡張アンテナ装置
9日前
ニチコン株式会社
AC入力検出回路
2日前
富士電子工業株式会社
電力変換装置
18日前
トヨタ自動車株式会社
ロータ
4日前
ユタカ電業株式会社
ケーブルダクト
6日前
日産自動車株式会社
ステータ
3日前
株式会社大林組
可搬式充電設備
3日前
NTN株式会社
モータユニット
6日前
株式会社デンソー
電力変換装置
2日前
株式会社ダイヘン
電力管理装置
25日前
株式会社ミツバ
巻線装置
9日前
株式会社正興電機製作所
地絡確認装置
9日前
株式会社アイシン
回転電機
2日前
志幸技研工業株式会社
ケーブル布設工法
16日前
カヤバ株式会社
アクチュエータユニット
16日前
株式会社アイシン
駆動装置
4日前
住友電装株式会社
ワイヤハーネス
26日前
株式会社豊田自動織機
車両用機器
6日前
株式会社デンソー
インバータ装置
18日前
株式会社明電舎
回転機
3日前
株式会社豊田自動織機
電力変換装置
17日前
東京瓦斯株式会社
電動車両充電機器
3日前
スズキ株式会社
モータケース
16日前
矢崎総業株式会社
プロテクタ
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ