TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136186
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034440
出願日
2024-03-06
発明の名称
腹腔鏡手術訓練装置
出願人
学校法人関西医科大学
代理人
個人
主分類
G09B
9/00 20060101AFI20250911BHJP(教育;暗号方法;表示;広告;シール)
要約
【課題】腹腔鏡手術における外科手技のトレーニングにおいて、外科医師の訓練生がドライボックス内において特定の手技を完遂するまでの時間を削減する。
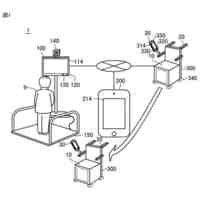
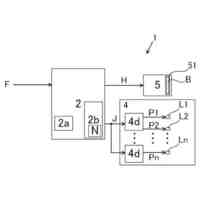
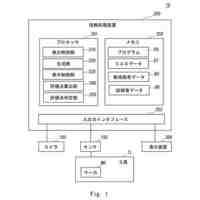
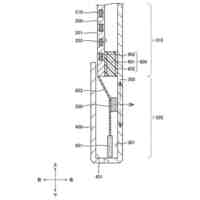
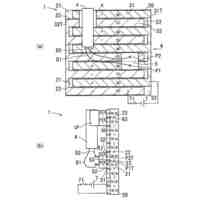
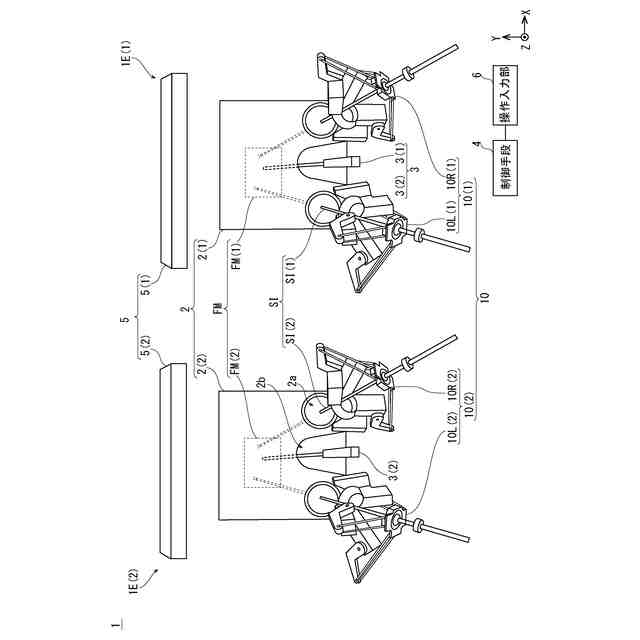
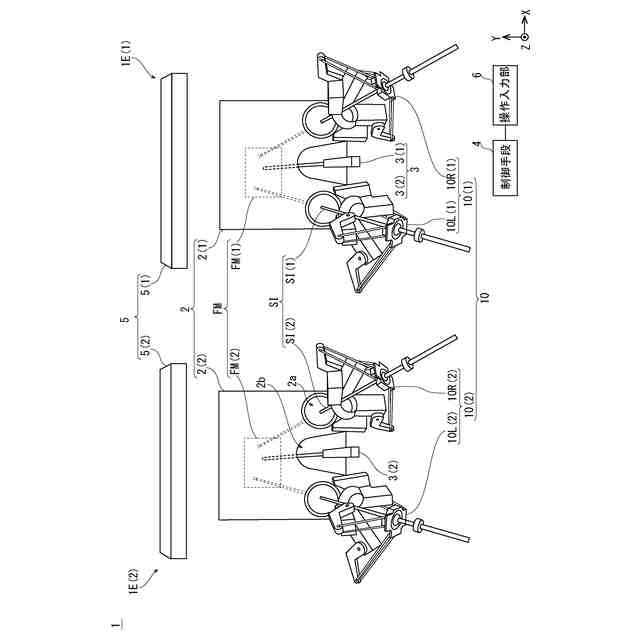
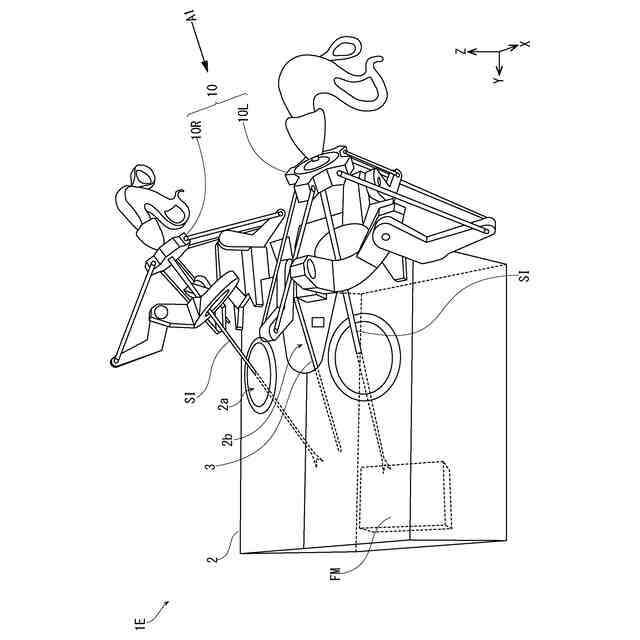
【解決手段】腹腔鏡手術訓練装置は、第1の生体モデルを内装可能な第1の筐体部と、第1の筐体部に配され、第1の生体モデルに対する操作が可能な左右一対の第1のパラレルリンクユニットと、第2の生体モデルを内装可能な第2の筐体部と、第2の筐体部に配され、第2の生体モデルに対する操作が可能な左右一対の第2のパラレルリンクユニットと、左右一対の第2のパラレルリンクユニットの動作が対応する左右一対の第1のパラレルリンクユニットの動作とそれぞれ等価となるよう制御する制御部とを備えた。
【選択図】図1
特許請求の範囲
【請求項1】
腹腔鏡手術訓練装置であって、
第1の生体モデルを内装可能な第1の筐体部と、
前記第1の筐体部に配され、前記第1の生体モデルに対する操作が可能な左右一対の第1のパラレルリンクユニットと、
第2の生体モデルを内装可能な第2の筐体部と、
前記第2の筐体部に配され、前記第2の生体モデルに対する操作が可能な左右一対の第2のパラレルリンクユニットと、
左右一対の前記第2のパラレルリンクユニットの動作が対応する左右一対の前記第1のパラレルリンクユニットの動作とそれぞれ等価となるよう制御する制御部とを備えた、
腹腔鏡手術訓練装置。
続きを表示(約 1,300 文字)
【請求項2】
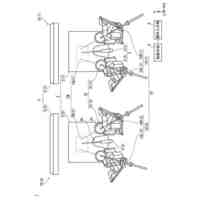
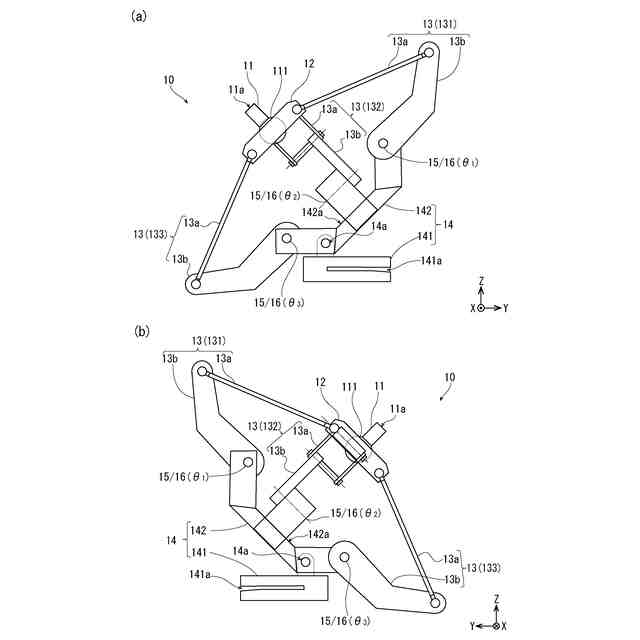
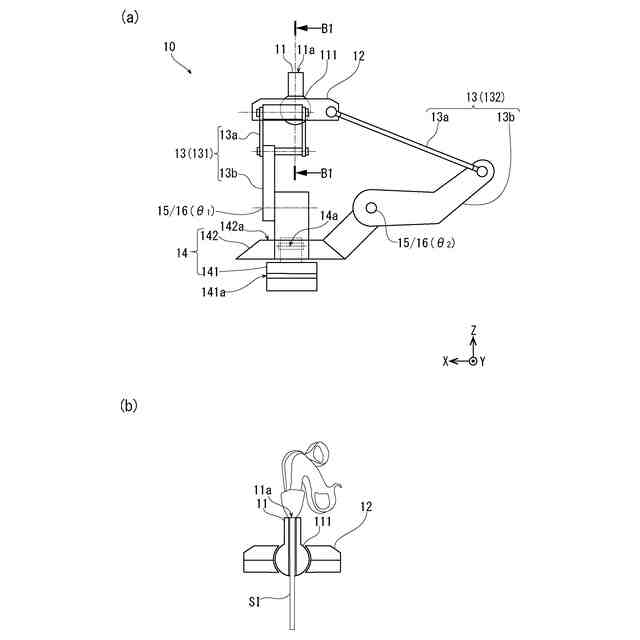
左右一対の前記第1のパラレルリンクユニットは、それぞれ、前記第1の生体モデルに対する操作が可能な第1の術具を保持可能な左右一対の第1のロボットハンドと、左右一対の前記第1のロボットハンドの3次元空間における位置及び角度をそれぞれ検出する左右一対の検出手段とを有し、
左右一対の前記第2のパラレルリンクユニットは、それぞれ、前記第2の生体モデルに対する操作が可能な第2の術具を保持可能な左右一対の第2のロボットハンドと、左右一対の前記第2のロボットハンドの3次元空間における位置及び角度をそれぞれ制御する左右一対の駆動手段とを有し、
前記制御部は、前記第2のロボットハンドの位置及び角度が前記第1のロボットハンドの位置及び角度とそれぞれ等価となるよう、左右一対の前記検出手段それぞれからの出力に基づき、対応する左右一対の前記駆動手段をそれぞれ制御する
請求項1に記載の腹腔鏡手術訓練装置。
【請求項3】
さらに、情報を記憶可能なデータ記憶部を有し、
前記制御部は、前記データ記憶部に保存された情報に基づき前記駆動手段を制御する
請求項2に記載の腹腔鏡手術訓練装置。
【請求項4】
前記制御部は、前記検出手段からの出力された前記第1のロボットハンドの位置及び角度を示す情報を前記データ記憶部に保存し、
当該情報に基づき前記駆動手段を制御する
請求項3に記載の腹腔鏡手術訓練装置。
【請求項5】
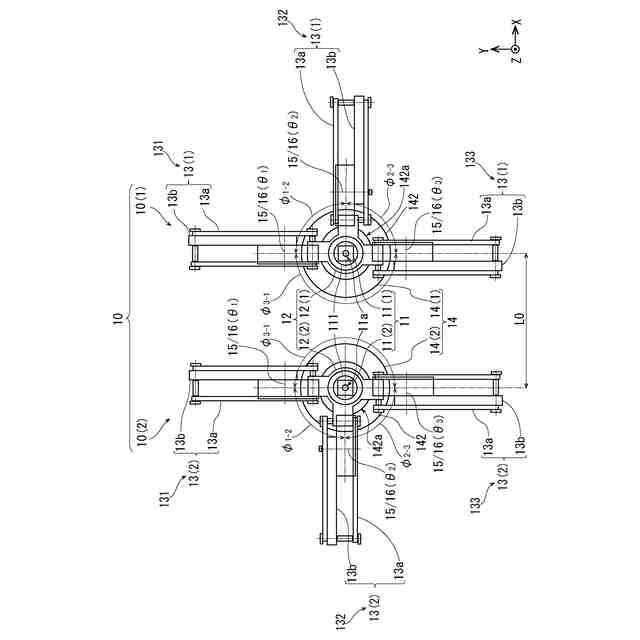
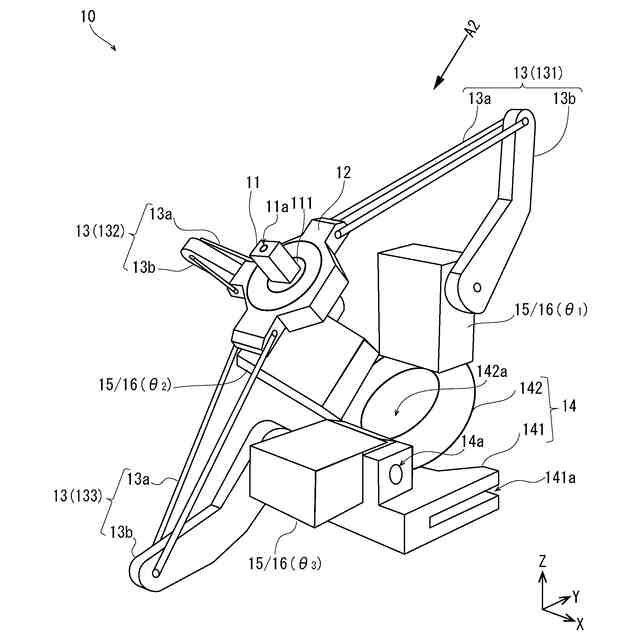
左右一対の前記第1のパラレルリンクユニットは、それぞれ、前記第1の筐体部と連結され、所定の距離だけ離れた左右一対の第1の基部にそれぞれ配され、左右一対の前記第1のロボットハンドをそれぞれ支持する、それぞれ3本以上の左右一対の第1のロボットアームを有し、
左右一対の前記第2のパラレルリンクユニットは、それぞれ、前記第2の筐体部と連結され、所定の距離だけ離れた左右一対の第2の基部にそれぞれ配され、左右一対の前記第2のロボットハンドをそれぞれ支持する、それぞれ3本以上の左右一対の第2のロボットアームを有し、
左右一対の前記検出手段は、それぞれ、左右一対の前記第1のロボットアームの前記第1の基部に対する角度を検出し、
左右一対の前記駆動手段は、左右一対の前記第1のロボットアームの角度を示す情報に基づき、それぞれ、左右一対の対応する前記第2のロボットアームの前記第2の基部に対する角度を制御し、
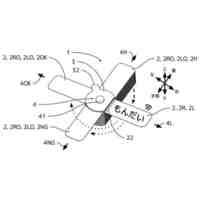
左右一対の前記第1の基部を平面視したとき、左右一対の複数の前記第1のロボットアームは、隣り合った前記第1のロボットアームの間の複数の中心角のうち、左右一対の反対側の前記第1のロボットアームの何れかと相対する側の中心角が、相対しない側の中心角よりも大きくなるように、前記第1の基部から延出され、
左右一対の前記第2の基部を平面視したとき、左右一対の複数の前記第2のロボットアームは、隣り合った前記第2のロボットアームの間の中心角のうち、左右一対の反対側の前記第2のロボットアームの何れかと相対する側の中心角が、相対しない側の中心角よりも大きくなるように、前記第2の基部から延出されている
請求項2に記載の腹腔鏡手術訓練装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、腹腔鏡手術における術者の外科手技のトレーニングに用いる腹腔鏡手術訓練装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
医療分野において腹腔鏡手術の件数が増加している。腹腔鏡手術は、患者の腹壁に設けた細いアクセスポートを経由して、内視鏡の視野の下で腹腔内に鉗子を挿入し、両手の鉗子の挿入・牽引及び回転運動の合成により縫合や切開等の外科手技を行う操作である。近年の腹腔鏡手術の件数の増加により、外科医師の訓練生による外科手技の取得やトレーニングを効果的に行う手法の必要性が増している。
【0003】
従来、腹腔鏡手術における外科手技のトレーニングは、医療用生体モデルを内装したドライボックスと呼ばれる腹腔鏡シミュレータを用いて、訓練生が鉗子により生体モデルに対し外科手技のシミュレーションを行なう手法によって行われてきた(例えば、特許文献1、非特許文献1)。従来の方法では、訓練生が新たな外科手技を修得する場合には、熟練医師によるビデオ等を用いて視覚から模範となる手技の動画像の情報を取得し、ドライボックスを用いてシミュレーションを繰り返すという方法が採られていた。
【先行技術文献】
【非特許文献】
【0004】
Limbs and Things、“Deliberate Practice with the Surgical Female Pelvic Trainer for gaining and maintaining competence in OB/GYN Laparoscopic Surgery”、[online]、[2024年2月16日検索]、インターネット〈URL: https://limbsandthings.com/us/news/37763/deliberate-practice-with-the-surgical-female-pelvic-trainer-for-gaining-and-maintaining-competence-in-obgyn-laparoscopic-surgery〉
【特許文献】
【0005】
特開2021―43443号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、ドライボックスを用いた手術手技のシミュレーションでは、ディスプレイに表示される内視鏡の2次元画面を見ながら鉗子の先端を空間内の目的通りの位置に移動させる操作が必要となり、外科医師の訓練生には、空間における鉗子の複雑な運動を立体視できない2次元の画面上で操る技量が求められる。
【0007】
さらに、近年、実行可能な腹腔鏡手術の術式が拡大したことに伴い、ドライボックスを用いたトレーニングにおける手技の質向上が求められており、その習得には見本となるビデオを見様見真似で再現するしか実行可能な方法が提供されていない。また、熟練医師によるビデオ等の視覚から得た2次元動画像に基づいて、新たな手技の複雑な動きを空間内で再現することは本来難しく、そのため、訓練生が新たな手技を適切に再現できるようになるまでには、相当の時間をトレーニングに費やすことが必要になっていた。
【0008】
本開示は、上記課題に鑑みてなされたものであり、腹腔鏡手術における外科手技のトレーニングにおいて、外科医師の訓練生がドライボックス内において特定の手技を完遂するまでの時間の削減に資する腹腔鏡手術訓練装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため本開示の一態様に係る腹腔鏡手術訓練装置は、第1の生体モデルを内装可能な第1の筐体部と、前記第1の筐体部に配され、前記第1の生体モデルに対する操作が可能な左右一対の第1のパラレルリンクユニットと、第2の生体モデルを内装可能な第2の筐体部と、前記第2の筐体部に配され、前記第2の生体モデルに対する操作が可能な左右一対の第2のパラレルリンクユニットと、左右一対の前記第2のパラレルリンクユニットの動作が対応する左右一対の前記第1のパラレルリンクユニットの動作とそれぞれ等価となるよう制御する制御部とを備えたことを特徴とする。
【発明の効果】
【0010】
本開示の一態様に係る腹腔鏡手術訓練装置によれば、腹腔鏡手術における外科手技のトレーニングにおいて、外科医師の訓練生がドライボックス内において特定の手技を完遂するまでの時間の削減に資する腹腔鏡手術訓練装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人関西医科大学
システム
3か月前
学校法人関西医科大学
腹腔鏡手術訓練装置
9日前
学校法人関西医科大学
肝実質細胞の精製方法
2か月前
個人
回転式カード学習具
25日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
個人
時刻表示機能つき手帳
1か月前
日本精機株式会社
表示装置
3日前
中国電力株式会社
標示旗
9日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
モデルで薔薇の花嫁様を描く為
20日前
トヨタ自動車株式会社
評価方法
2か月前
シャープ株式会社
表示装置
10日前
シャープ株式会社
表示装置
3か月前
株式会社一弘社
情報表示板
26日前
シャープ株式会社
表示装置
2か月前
シャープ株式会社
表示装置
3か月前
個人
音楽教材
1か月前
パイオニア株式会社
表示装置
2か月前
個人
口唇閉鎖の訓練具
2か月前
株式会社半導体エネルギー研究所
半導体装置
1か月前
ニチレイマグネット株式会社
磁着式電飾装置
9日前
株式会社ノジマ
応対体験システム
2か月前
株式会社リコー
画像投射システム
10日前
シチズンファインデバイス株式会社
液晶表示装置
18日前
シチズンファインデバイス株式会社
液晶表示装置
1か月前
株式会社サンゲツ
見本帳
1か月前
個人
サインポスト
2か月前
BEST株式会社
吊り下げ表示部材
1か月前
学校法人関西医科大学
腹腔鏡手術訓練装置
9日前
株式会社バンダイ
情報処理装置およびプログラム
2か月前
中国電力株式会社
危険予知訓練装置
3か月前
シャープ株式会社
表示装置
1か月前
朝日インテック株式会社
心臓モデル装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ