TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136413
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034973
出願日
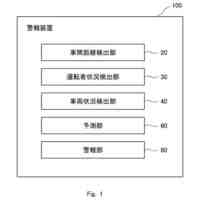
2024-03-07
発明の名称
運転支援装置
出願人
株式会社SUBARU
代理人
弁理士法人太田特許事務所
主分類
G08G
1/16 20060101AFI20250911BHJP(信号)
要約
【課題】ドライバが認識しているリスク対象及び認識するはずのリスク対象を報知対象から除外し、ドライバに与える煩わしさを軽減する。
【解決手段】運転支援装置は、車両の周囲環境の情報に基づいてリスク対象を検出するリスク検出処理と、検出したリスク対象の存在を報知する報知処理とを実行し、報知処理では、車両が所定の交通シーンにおかれたときに、所定の交通シーンでのドライバの視線の時系列の移動パターンであって視線滞留領域と視線遷移領域とを含む視線移動パターンを学習した視線移動パターン情報に基づいて、視線滞留領域にドライバが視線を向けるタイミングで視線滞留領域に存在する視認リスクを特定し、視認リスクを報知対象から除外する。
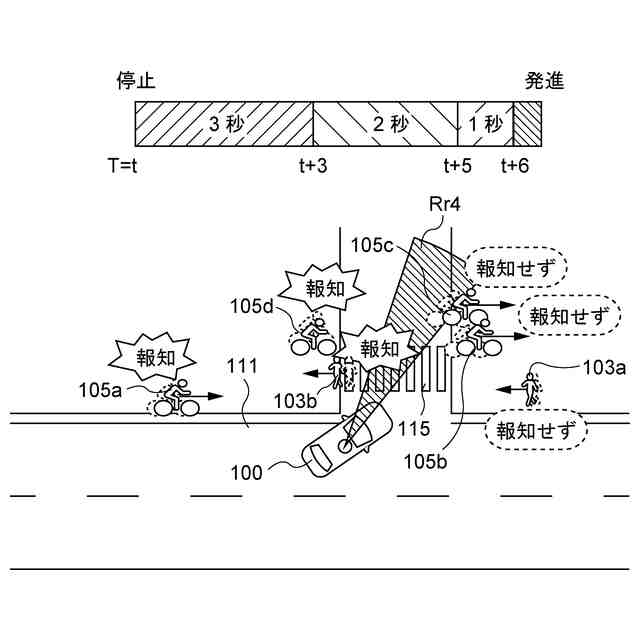
【選択図】図11
特許請求の範囲
【請求項1】
車両の周囲の移動体の存在をドライバに報知する運転支援装置において、
一つ又は複数のプロセッサと、前記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、
前記一つ又は複数のプロセッサは、
前記車両の周囲環境の情報に基づいてリスク対象を検出するリスク検出処理と、
検出した前記リスク対象の存在を報知する報知処理と、を実行し、
前記報知処理では、
前記車両が所定の交通シーンにおかれたときに、前記所定の交通シーンでの前記ドライバの視線の時系列の移動パターンであって、視線を向けた時間が所定時間以上である視線滞留領域と、視線を向けた時間が前記所定時間未満である視線遷移領域と、を含む視線移動パターンを学習した視線移動パターン情報に基づいて、前記視線滞留領域に前記ドライバが視線を向けるタイミングで前記視線滞留領域に存在する視認リスクを特定し、前記視認リスクを報知対象から除外する、運転支援装置。
続きを表示(約 750 文字)
【請求項2】
前記一つ又は複数のプロセッサは、
前記報知処理において、さらに、前記視線移動パターン情報に基づいて、前記視線遷移領域を前記ドライバの視線が通過するタイミングで前記視線遷移領域に存在する前記リスク対象であって、所定の状態変化量が所定の基準よりも大きい視認可能リスクを特定し、前記視認可能リスクを前記報知対象から除外する、請求項1に記載の運転支援装置。
【請求項3】
前記一つ又は複数のプロセッサは、
前記報知処理において、さらに、前記視線滞留領域に前記ドライバが視線を向けたタイミングで前記視線滞留領域内に存在しない前記リスク対象であって、前記リスク対象の存在を示唆する情報が前記視線滞留領域内に存在する示唆リスクを特定し、前記示唆リスクを前記報知対象から除外する、請求項1に記載の運転支援装置。
【請求項4】
前記一つ又は複数のプロセッサは、
前記報知処理において、さらに、前記視線移動パターン情報に基づいて、前記視線滞留領域及び前記視線遷移領域内に存在しない前記リスク対象であって、前記リスク対象の存在及び前記リスク対象の所定の状態変化量が所定の基準よりも大きいことを示唆する情報が前記視線遷移領域内に存在する示唆リスクを特定し、前記示唆リスクを前記報知対象から除外する、請求項1に記載の運転支援装置。
【請求項5】
前記一つ又は複数のプロセッサは、
前記報知処理において、前記報知対象から除外した前記リスク対象のうち、前記ドライバが視線を向けていないタイミングで所定の行動変化を行った行動変化リスクが検出された場合、前記行動変化リスクを前記報知対象に復帰させる、請求項1に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運転支援装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
車両の周囲に存在する物体をセンサにより検出し、車両のドライバに報知する技術が知られている。ただし、ドライバが物体を認識しているにもかかわらず報知が行われると、ドライバは煩わしさを感じると考えられる。このため、所定の条件を満たす物体を報知の対象から除外する技術が提案されている。
【0003】
例えば特許文献1には、車両の周辺に存在している物体を検出し、検出した物体の存在をドライバに報知する報知装置を備え、制御部が、車両のドライバの視線を逐次検出し、検出した視線に基づいて定まる認識方向範囲を、周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、周辺物体検出装置が検出した物体が報知範囲内に存在していることに基づいて、物体が存在することを報知装置に報知させる報知制御装置が開示されている。
【0004】
また、特許文献2には、視線検知装置の検知結果を参照し、移動体のドライバの視点から視線方向に延出し、視点から遠くなるにつれて所定角度で広がる範囲を視野範囲として認識し、移動体に配置された視覚センサにより移動体の周囲が撮像された画像データに基づいて、画像データ内に写された移動体の周囲の環境に存在する物標を認識し、認識した物標の領域を所定形状で設定し、物標の領域において複数の判定点を設定し、複数の判定点と視野範囲との重複度合いに基づいて、ドライバが物標を認識しているか否かを判定し、ドライバが認識をしていないと判定した物標の存在を第1の態様で報知装置に報知させ、ドライバによる認識が部分的に認識している状態であると判定した物標の存在を第2の態様で報知装置に報知させ、存在を報知した物標に対するドライバによる認識が認識している状態となった場合に、報知装置に当該前記物標に関する報知を終了させる認識装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2019-117668号公報
特開2020-20167号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1及び2に記載された技術は、要するに視線を向けた範囲(認識方向範囲又は視野範囲)にいた物体を報知対象から除外する技術である。このため、ある時刻でドライバが視線を向けた範囲に物体が存在しない場合、その後のドライバの行動によりドライバが物体を認識する場合であっても報知してしまい、煩わしさにつながる。また、ドライバは、直接視線を向けていない場合であっても、視線遷移の中で視野に入った物体の存在を認知する可能性があり、当該物体を報知する場合には煩わしさにつながる。さらに、ドライバは、直接視線を向けていない場合であっても、ヘッドライトの照明など物体の存在を示唆する情報が視野に入った場合には物体の存在を認知する可能性があり、当該物体を報知する場合には煩わしさにつながる。
【0007】
本開示は、上記問題に鑑みてなされたものであり、本開示の目的とするところは、車両のドライバの視線移動パターン情報に基づいて、ドライバが認識しているリスク対象及び認識するはずのリスク対象を報知対象から除外し、ドライバに与える煩わしさを軽減可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本開示のある観点によれば、車両の周囲の移動体の存在をドライバに報知する運転支援装置において、一つ又は複数のプロセッサと、上記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、上記一つ又は複数のプロセッサは、上記車両の周囲環境の情報に基づいてリスク対象を検出するリスク検出処理と、検出した上記リスク対象の存在を報知する報知処理と、を実行し、上記報知処理では、上記車両が所定の交通シーンにおかれたときに、上記所定の交通シーンでの上記ドライバの視線の時系列の移動パターンであって、視線を向けた時間が所定時間以上である視線滞留領域と、視線を向けた時間が上記所定時間未満である視線遷移領域と、を含む視線移動パターンを学習した視線移動パターン情報に基づいて、上記視線滞留領域に上記ドライバが視線を向けるタイミングで上記視線滞留領域に存在する視認リスクを特定し、上記視認リスクを報知対象から除外する、運転支援装置が提供される。
【発明の効果】
【0009】
以上説明したように本開示によれば、車両のドライバの視線移動パターン情報に基づいて、ドライバが認識しているリスク対象及び認識するはずのリスク対象を報知対象から除外し、ドライバに与える煩わしさを軽減することができる。
【図面の簡単な説明】
【0010】
ドライバが認識したリスク対象を報知対象から除外する参考例を示す説明図である。
ドライバが認識したリスク対象を報知対象から除外する参考例を示す説明図である。
ドライバが認識したリスク対象を報知対象から除外する参考例を示す説明図である。
ドライバが認識したリスク対象を報知対象から除外する参考例を示す説明図である。
ドライバが認識したリスク対象を報知対象から除外する参考例を示す説明図である。
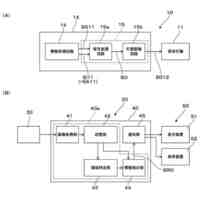
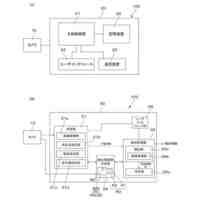
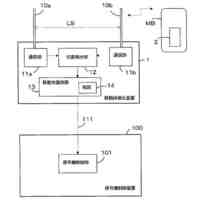
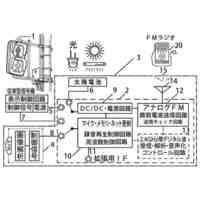
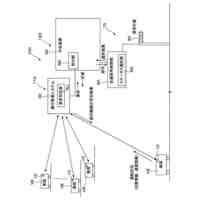
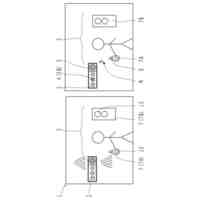
本開示の一実施形態に係る運転支援装置を備えた車両の構成例を示す模式図である。
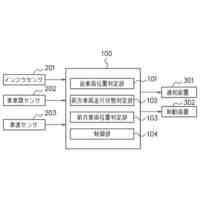
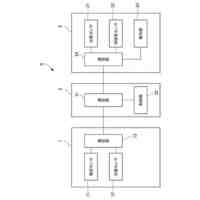
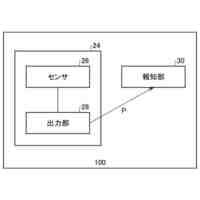
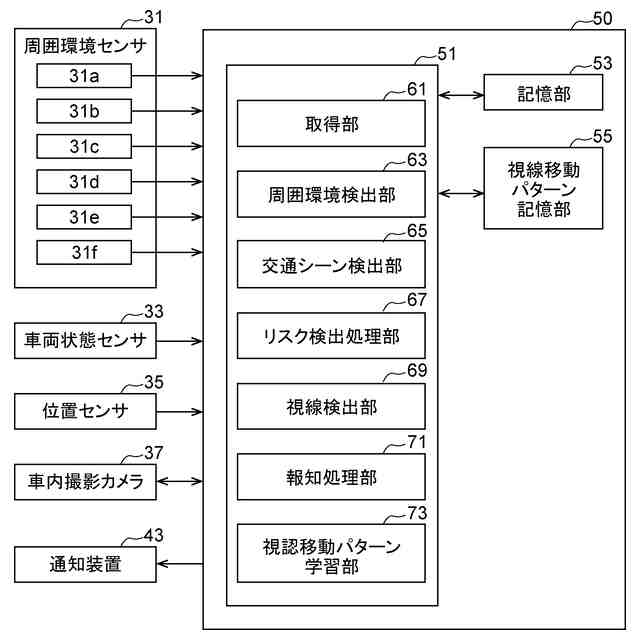
同実施形態に係る運転支援装置の構成例を示すブロック図である。
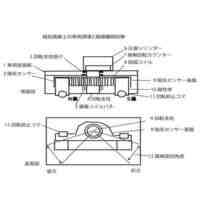
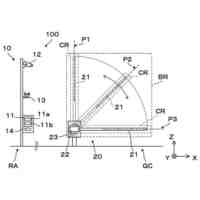
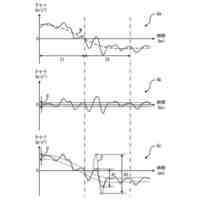
ドライバの視線の向きの時間変化の情報(視線移動パターン情報)の例を示す説明図である。
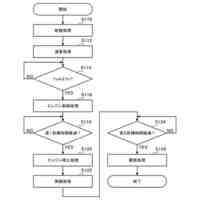
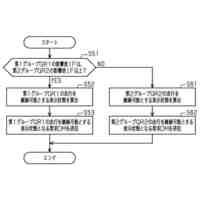
同実施形態に係る運転支援装置による運転支援処理のルーチンを示すフローチャートである。
同実施形態に係る運転支援装置による運転支援処理のルーチンを示すフローチャートである。
同実施形態に係る運転支援装置による報知処理を適用した例を示す説明図である。
同実施形態に係る運転支援装置による報知処理を適用した別の例を示す説明図である。
同実施形態に係る運転支援装置による報知処理を適用した別の例を示す説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
1日前
株式会社SUBARU
硫黄除去方法
1日前
株式会社SUBARU
ゴム組成物および防振ゴム
1日前
日本精機株式会社
警報システム
29日前
個人
自動電動車椅子
12日前
スズキ株式会社
運転支援装置
28日前
エムケー精工株式会社
車両誘導装置
1か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
検知器
22日前
株式会社国際電気
防災システム
1か月前
ニッタン株式会社
検知器
20日前
個人
磁気路上での車両の路線離脱防御
1日前
ニッタン株式会社
検知器
20日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
TOA株式会社
拡声放送システム
2か月前
トヨタ自動車株式会社
車両
1か月前
日本信号株式会社
信号情報システム
2か月前
株式会社JVCケンウッド
警報装置
2か月前
日本信号株式会社
情報提供システム
2か月前
トヨタ自動車株式会社
サーバ
5日前
日本信号株式会社
異常走行検出装置
5日前
株式会社小糸製作所
移動体検出装置
22日前
個人
乗り物の移動を支援する方法及び装置
2か月前
日本精機株式会社
報知装置及び報知システム
11日前
株式会社小糸製作所
車両検出システム
22日前
トヨタ自動車株式会社
回避動作判別装置
2か月前
個人
現示内容に関する情報放送機能付き信号機
2か月前
日本信号株式会社
交通信号制御システム
2か月前
能美防災株式会社
火災感知器
25日前
能美防災株式会社
非常伝達装置
28日前
ヨシモトポール株式会社
接近報知システム
25日前
本田技研工業株式会社
運転評価装置
2か月前
ホーチキ株式会社
火災検出システム
2か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
情報提供装置
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ