TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025137675
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2025121677,2024028024
出願日
2025-07-18,2017-10-17
発明の名称
物品移動装置
出願人
ユニパルス株式会社
代理人
主分類
B25J
13/08 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物品の移動作業を、装置のフットプリントの増大化、大型化を抑制して効率的に行うことができる物品移動装置の提供を課題としている。
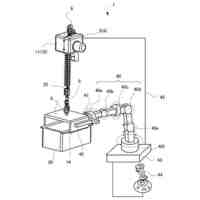
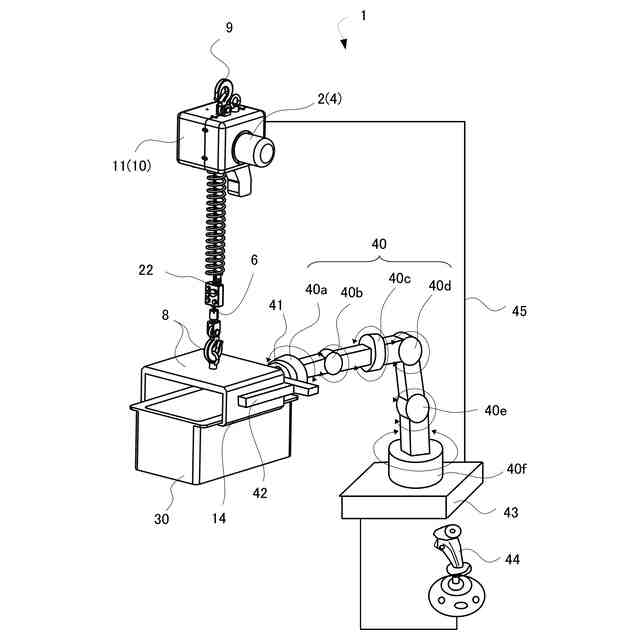
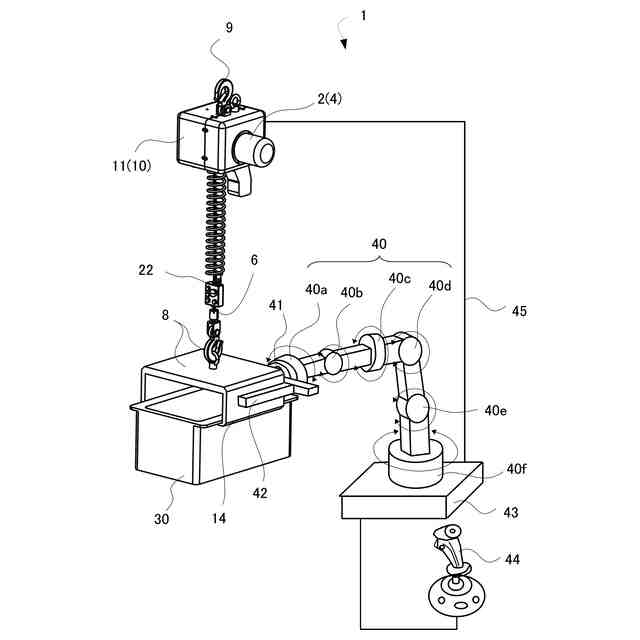
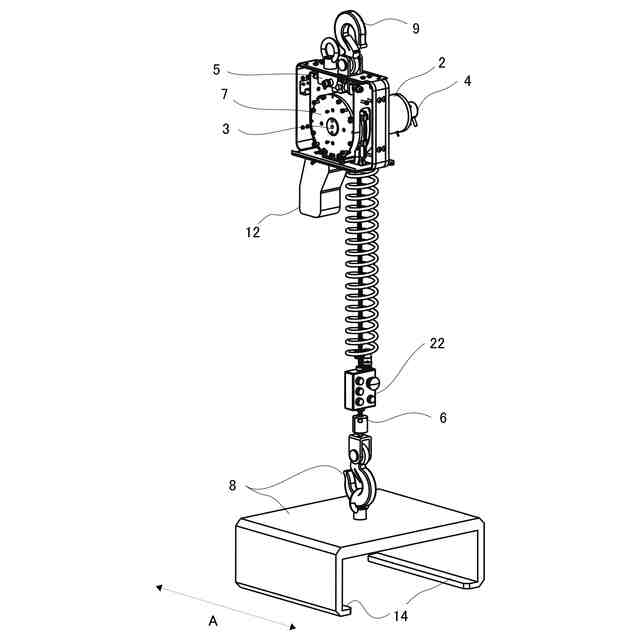
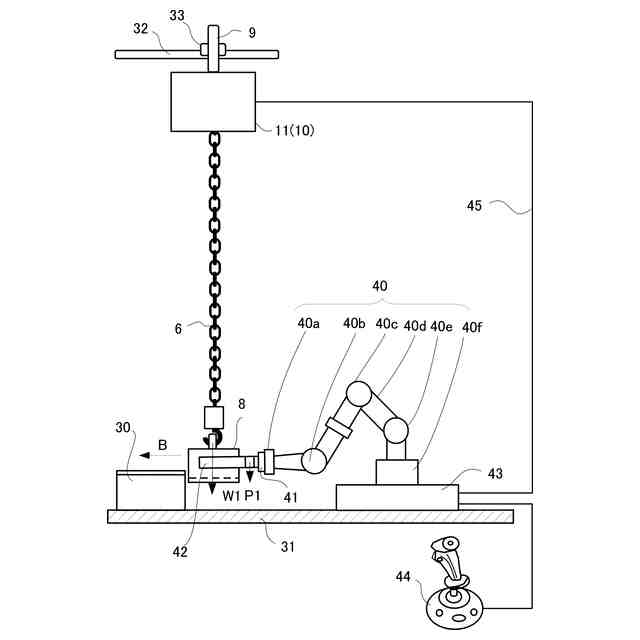
【解決手段】物品30を係止する係止部材8と、係止部材8の昇降を行う昇降作動部及び駆動源のモータ部と、物品30及び係止部材8の少なくとも1つに当接する当接部材42と、当接部材42を移動させるロボット構成の移動部40と、を含む物品移動装置であって、この物品移動装置における制御部10、43は、当接部材42が物品30及び係止部材8に当接している状態で動く時の重量と鉛直方向の成分との検出を基に演算して制御値を生成し、制御値に基づいて物品30をバランスするようにモータ部2を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
モータを駆動源とする昇降作動部を少なくとも有し、該モータへのモータ制御に基づいて、該昇降作動部から吊下げられる係止部材が係止した物品の昇降を可能とする吊下げ本体部と、
鉛直方向を含む所定方向に可動するアームと前記物品を繋がるようにするための当接部材と、
前記係止となる前記物品と繋がる前記アームを動かすための印加力が生じる場合に、該印加力を基に検出される鉛直方向の成分と、前記昇降作動部に荷重を生じさせる前記係止部材及び前記物品を基にする検出からの重量に基づいて所定制御を可能にする制御部と、
を備え、
前記吊下げ本体部は、
前記吊下げとなる前記係止部材の上方部位で、水平方向に移動させ得るスライド手段に取付け可能な構成とされ、
前記アームを動かす前記印加力を生じさせる電源供給による出力が可能なロボット構成部の制御に基づいて該アームを動かした場合に、これに伴う水平方向又は鉛直方向へ前記係止部材の移動をできるようにする物品移動装置であって、
前記制御部は、
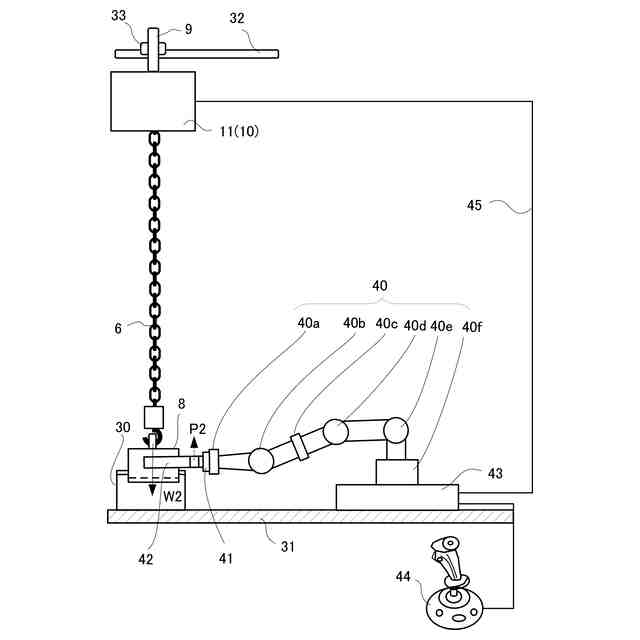
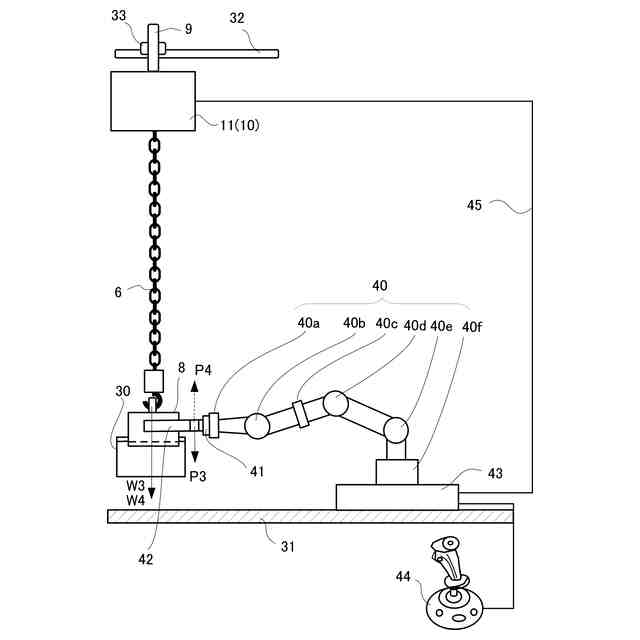
前記アームが鉛直方向に可動する共に、前記係止部材が係止した前記物品が昇降する移動状態時であって、該移動状態時における所定の前記検出により求められる所定の重量となるときに、前記所定制御に基づいて、前記係止部材及び前記物品を基にする正味の重量をキャンセルさせるようなバランス状態にする処理を可能にし、
前記バランス状態にする処理は、
前記所定の重量を基に、前記正味の重量についてのキャンセルとしつつ、前記ロボット構成部で扱い得る出力に応じた許容範囲内の前記印加力にて動かせるような前記モータ制御とするための演算を可能とし、
前記アームを動かすことに伴う鉛直上方向の移動となるとき、又は、鉛直下方向の移動となるときの前記所定の前記検出に応じた加減となるよう、互いに処理を異ならせる前記演算にして、
前記演算から上下の各前記移動に対応する制御値を求めて、該制御値に基づいて前記許容範囲内の前記印加力で動かせる昇降のアシストが可能な前記モータ制御を行うようにする、
ことを特徴とする物品移動装置。
続きを表示(約 940 文字)
【請求項2】
モータを駆動源とする昇降作動部を少なくとも有し、該モータへのモータ制御に基づいて、該昇降作動部から吊下げられる係止部材が係止した物品の昇降を可能とする吊下げ本体部と、
鉛直方向を含む所定方向に可動するアームと前記物品を繋がるようにするための当接部材と、
前記係止となる前記物品と繋がる前記アームを動かすための印加力が生じる場合に、該印加力を基に検出される鉛直方向の成分と、前記昇降作動部に荷重を生じさせる前記係止部材及び前記物品を基にする検出からの重量に基づいて所定制御を可能にする制御部と、
を備え、
前記吊下げ本体部は、
前記吊下げとなる前記係止部材の上方部位で、水平方向に移動させ得るスライド手段に取付け可能な構成とされ、
前記アームを動かす前記印加力を生じさせる電源供給による出力が可能なロボット構成部の制御に基づいて該アームを動かした場合に、これに伴う水平方向又は鉛直方向へ前記係止部材の移動をできるようにする物品移動装置システムであって、
前記制御部は、
前記アームが鉛直方向に可動する共に、前記係止部材が係止した前記物品が昇降する移動状態時であって、該移動状態時における所定の前記検出により求められる所定の重量となるときに、前記所定制御に基づいて、前記係止部材及び前記物品を基にする正味の重量をキャンセルさせるようなバランス状態にする処理を可能にし、
前記バランス状態にする処理は、
前記所定の重量を基に、前記正味の重量についてのキャンセルとしつつ、前記ロボット構成部で扱い得る出力に応じた許容範囲内の前記印加力にて動かせるような前記モータ制御とするための演算を可能とし、
前記アームを動かすことに伴う鉛直上方向の移動となるとき、又は、鉛直下方向の移動となるときの前記所定の前記検出に応じた加減となるよう、互いに処理を異ならせる前記演算にして、
前記演算から上下の各前記移動に対応する制御値を求めて、該制御値に基づいて前記許容範囲内の前記印加力で動かせる昇降のアシストが可能な前記モータ制御を行うようにする、
ことを特徴とする物品移動装置システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、製造分野の製造組立てや搬送などに用いる、物品を移動させる際にモータによるアシストで重量バランスさせ僅かな操作力で移動させる
物品移動装置
に関するものである。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
従来から工業製品の組立てや移送を行う工場などでは、製品、半完成品などの物品を移動させる産業用のロボットが使用されている。このような工場では生産ラインにおいて、例えば多関節のアームで構成されそのアーム先端にエンドエフェクタを有するロボットが用いられている。ロボットの関節機構は、ACサーボモータやDCブラシレスサーボモータ等のサーボモータと、高出力のトルクを得るためにサーボモータの出力側には減速機とを有し、アームやリンク等の可動部材に接続されて構成されている。
【0003】
このようなロボットを用いて、サイズや重量が異なる物品を扱う多品種少量生産を行うことが要望されている。
【先行技術文献】
【特許文献】
【0004】
特開平06-231867号公報
特開2003-266252号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこでサイズや重量が異なる物品を扱うために、対象とする物品に適合したロボットを複数台設置する発明が公知である(特許文献1及び特許文献2)。このようにロボットを複数台設置するとフットプリントが大きくなるという課題がある。そこでフットプリントを低減するために、ロボット台数を減らし汎用性を高めると、対象とする物品の中で最大外形、最大重量の物品に合わせたロボットを用いる必要性があり、ロボットの大型化という課題がある。
【0006】
また生産ラインにおいて、既に設置されているロボットが扱える大きさ、重量を超える物品を扱う必要性が生じた場合は、より大きなロボットへの交換を行う必要があり、フットプリントの増大に加えて生産ラインのレイアウトも変更することになり、この設置及びレイアウト変更に要する時間が多大となるという課題もあった。
【0007】
このような問題に鑑みて、本発明は様々な重量の物品の移動作業を、装置のフットプリントの増大化、大型化を抑制して効率的に行うことができる、
物品移動装置又は
物品移動装置システムの提供を目的としている。
【課題を解決するための手段】
【0008】
本発明
は、上記の目的を達成するために、
昇降させる物品を係止する係止部材と、
係止部材の昇降を行う昇降作動部と、
昇降作動部と繋がっている駆動源のモータ部と、
昇降作動部に加わる重量を検出して重量値を出力する重量検出部と、
物品及び係止部材の少なくとも1つに当接するように設けられた当接部材と、
当接部材を動力にて移動させる移動部と、
当接部材と移動部との間に配置されて当接部材に加わる印加力を検出して印加力値を出力する力検出部と、
を含んで物品の移動を行う物品移動装置システムであって、
物品移動装置システムの制御を行う制御部は、
当接部材が物品及び係止部材の少なくとも一つに当接している状態の時に、重量値及び印加力値を基に演算して制御値を生成し、
制御値に基づいて係止部材若しくは物品がバランス状態となるようにモータ部を制御する
ようにしてもよい
。
【0009】
また本発明に記載の物品移動装置
は、上記の目的を達成するために、
モータを駆動源とする昇降作動部を少なくとも有し、該モータへのモータ制御に基づいて、該昇降作動部から吊下げられる係止部材が係止した物品の昇降を可能とする吊下げ本体部と、
鉛直方向を含む所定方向に可動するアームと物品を繋がるようにするための当接部材と、
上記した係止となる物品と繋がるアームを動かすための印加力が生じる場合に、該印加力を基に検出される鉛直方向の成分と、前記昇降作動部に荷重を生じさせる係止部材及び物品を基にする検出からの重量に基づいて所定制御を可能にする制御部と、
を備え、
上記吊下げ本体部は、
上記した吊下げとなる係止部材の上方部位で、水平方向に移動させ得るスライド手段に取付け可能な構成とされ、
上記したアームを動かす印加力を生じさせる電源供給による出力が可能なロボット構成部の制御に基づいて該アームを動かした場合に、これに伴う水平方向又は鉛直方向へ係止部材の移動をできるようにする物品移動装置であって、
上記制御部は、
アームが鉛直方向に可動する共に、係止部材が係止した物品が昇降する移動状態時であって、該移動状態時における所定の検出により求められる所定の重量となるときに、上記した所定制御に基づいて、係止部材及び物品を基にする正味の重量をキャンセルさせるようなバランス状態にする処理を可能にし、
上記バランス状態にする処理は、
上記した所定の重量を基に、正味の重量についてのキャンセルとしつつ、ロボット構成部で扱い得る出力に応じた許容範囲内の印加力にて動かせるようなモータ制御とするための演算を可能とし、
上記したアームを動かすことに伴う鉛直上方向の移動となるとき、又は、鉛直下方向の移動となるときの所定の検出に応じた加減となるよう、互いに処理を異ならせる演算にして、
上記した演算から上下の各移動に対応する制御値を求めて、該制御値に基づいて許容範囲内の印加力で動かせる昇降のアシストが可能なモータ制御を行うようにする構成となるようにしてもよい
。
【0010】
また本発明に記載の物品移動装置システムは
、上記の目的を達成するために、
モータを駆動源とする昇降作動部を少なくとも有し、該モータへのモータ制御に基づいて、該昇降作動部から吊下げられる係止部材が係止した物品の昇降を可能とする吊下げ本体部と、
鉛直方向を含む所定方向に可動するアームと物品を繋がるようにするための当接部材と、
上記した係止となる物品と繋がるアームを動かすための印加力が生じる場合に、該印加力を基に検出される鉛直方向の成分と、前記昇降作動部に荷重を生じさせる係止部材及び物品を基にする検出からの重量に基づいて所定制御を可能にする制御部と、
を備え、
上記吊下げ本体部は、
上記した吊下げとなる係止部材の上方部位で、水平方向に移動させ得るスライド手段に取付け可能な構成とされ、
上記したアームを動かす印加力を生じさせる電源供給による出力が可能なロボット構成部の制御に基づいて該アームを動かした場合に、これに伴う水平方向又は鉛直方向へ係止部材の移動をできるようにする物品移動装置システムであって、
上記制御部は、
アームが鉛直方向に可動する共に、係止部材が係止した物品が昇降する移動状態時であって、該移動状態時における所定の検出により求められる所定の重量となるときに、上記した所定制御に基づいて、係止部材及び物品を基にする正味の重量をキャンセルさせるようなバランス状態にする処理を可能にし、
上記バランス状態にする処理は、
上記した所定の重量を基に、正味の重量についてのキャンセルとしつつ、ロボット構成部で扱い得る出力に応じた許容範囲内の印加力にて動かせるようなモータ制御とするための演算を可能とし、
上記したアームを動かすことに伴う鉛直上方向の移動となるとき、又は、鉛直下方向の移動となるときの所定の検出に応じた加減となるよう、互いに処理を異ならせる演算にして、
上記した演算から上下の各移動に対応する制御値を求めて、該制御値に基づいて許容範囲内の印加力で動かせる昇降のアシストが可能なモータ制御を行うようにする構成となるようにしてもよい
。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ユニパルス株式会社
物品移動装置
10日前
株式会社豊田中央研究所
3軸ロードセル及び荷重検出システム
19日前
個人
固定補助具
1か月前
個人
折りたたみ工具
21日前
株式会社三協システム
製函機
19日前
CKD株式会社
把持装置
20日前
株式会社三協システム
移載装置
18日前
株式会社不二越
ロボット操作装置
26日前
住友重機械工業株式会社
教示装置
2か月前
株式会社不二越
ロボットシステム
1か月前
SMC株式会社
着脱装置
19日前
太陽パーツ株式会社
アシストスーツ
21日前
株式会社ミクロブ
把持装置
20日前
日本精工株式会社
締結用工具
1か月前
ARMA株式会社
ジョイントフレーム
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
エッジ仕上げ装置
10日前
株式会社不二越
ロボットシステム
21日前
株式会社不二越
ロボットシステム
18日前
本田技研工業株式会社
装置
3日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社マキタ
電気機器
2か月前
株式会社不二越
垂直多関節ロボット
11日前
トヨタ自動車株式会社
歩行ロボット
24日前
大和ハウス工業株式会社
ねじ回転工具
19日前
株式会社不二越
協働ロボットシステム
1か月前
ダイハツ工業株式会社
移載治具
1か月前
ライオン株式会社
移載システム
12日前
株式会社不二越
ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
2か月前
コネクテッドロボティクス株式会社
保持システム
1か月前
シヤチハタ株式会社
マーキング装置
24日前
シヤチハタ株式会社
マーキング装置
24日前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ