TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138582
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2025028402
出願日
2025-02-25
発明の名称
パワー半導体のばらつき補正
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
H03K
17/14 20060101AFI20250917BHJP(基本電子回路)
要約
【課題】アクティブゲートドライバ(AGD)によって駆動されるパワー半導体のばらつきを補正する方法を提供する。
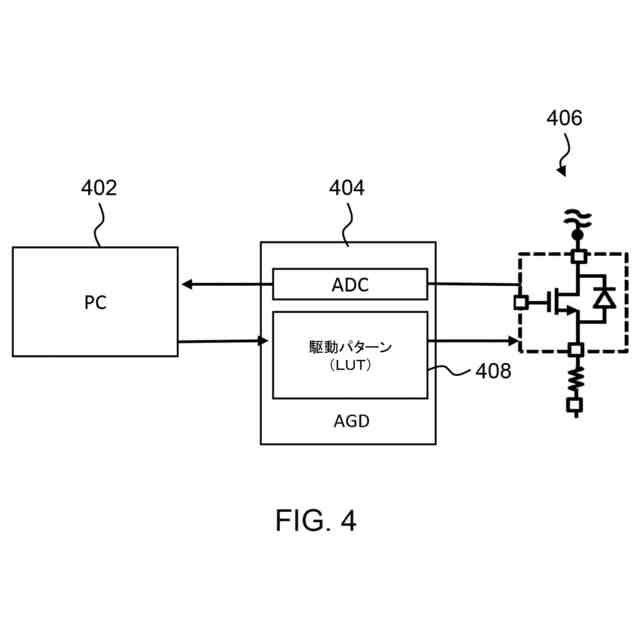
【解決手段】AGD404の複数の駆動パターンを生成し、かつ、AGDを用いて、複数の動作条件でパワー半導体406を制御することを備える方法であって、コンピュータ(PC)402は、各動作条件について、パワー半導体の1つまたは複数の電気信号を取得し、パワー半導体の1つまたは複数のキーパラメータでのばらつきを1つまたは複数の電気信号から検出し、1つまたは複数のキーパラメータでのばらつきに対応する駆動パターンを、1つまたは複数のキーパラメータでのばらつきと駆動パターンの1つまたは複数の駆動パラメータとの間の予め決定された関係に基づいて生成し、各動作条件についての生成された駆動パターンと、1つまたは複数のキーパラメータでの対応するばらつきとをメモリに記憶する。
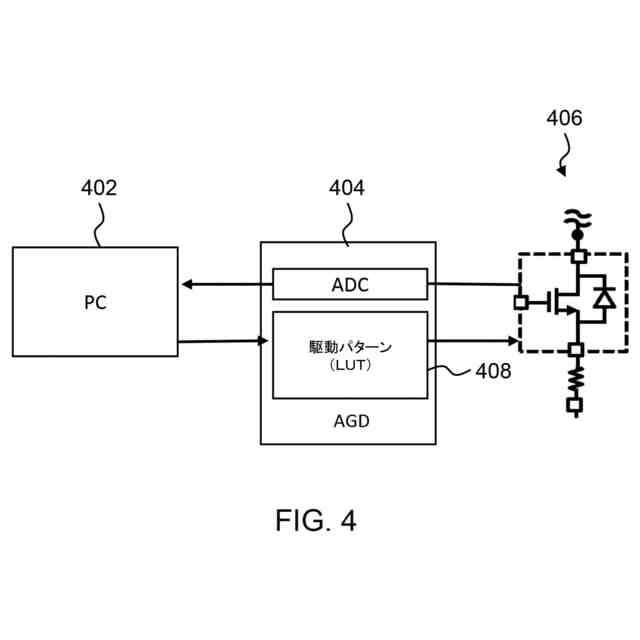
【選択図】図4
特許請求の範囲
【請求項1】
アクティブゲートドライバ(AGD)の複数の駆動パターンを生成する方法であって、
前記AGDを用いて、複数の動作条件でパワー半導体を制御することと、
各動作条件について、
前記パワー半導体の1つまたは複数の電気信号を取得すること、
前記1つまたは複数の電気信号から前記パワー半導体の1つまたは複数のキーパラメータでのばらつきを検出すること、および
前記1つまたは複数のキーパラメータでの前記ばらつきに対応する駆動パターンを、前記1つまたは複数のキーパラメータでの前記ばらつきと前記駆動パターンの1つまたは複数の駆動パラメータとの間の予め決定された関係に基づいて生成することと、
各動作条件についての生成された複数の駆動パターンと、前記1つまたは複数のキーパラメータでの対応する前記ばらつきとをメモリに記憶することと
を備える、方法。
続きを表示(約 2,000 文字)
【請求項2】
各動作条件について、
基準駆動パターンの対応する複数の駆動パラメータとは異なる前記生成された駆動パターンの駆動パラメータの数を決定することと、
前記基準駆動パターンの前記対応する複数の駆動パラメータとは異なる駆動パラメータの前記数が閾値数よりも大きいかどうかを決定することと
をさらに備え、
ここにおいて、前記生成された複数の駆動パターンのうちの駆動パターンは、前記基準駆動パターンの前記対応する複数の駆動パラメータとは異なる前記駆動パターンの駆動パラメータの前記数が前記閾値数よりも大きい場合に記憶される、請求項1に記載の方法。
【請求項3】
前記1つまたは複数のキーパラメータのうちの1つは、ターンオン遅延時間を含み、ここにおいて、前記駆動パターンを生成することは、前記駆動パターンを生成するために基準駆動パターンの1つまたは複数のステップタイミングを適合させることを備える、請求項1に記載の方法。
【請求項4】
前記1つまたは複数の電気信号は、ゲート電圧波形とドレイン電流波形とを備え、ここにおいて、前記ターンオン遅延時間は、前記AGDが電圧を出力し始めるときとドレイン電流が流れ始めるときとの間の時間である、請求項3に記載の方法。
【請求項5】
前記複数の動作条件は、複数の動作電圧または複数の動作温度の少なくともいずれかを備える、請求項1に記載の方法。
【請求項6】
アクティブゲートドライバ(AGD)の複数の駆動パターンを生成する方法であって、
前記AGDを用いて、同じモデルの複数のパワー半導体を制御することと、
各パワー半導体について、
前記パワー半導体の1つまたは複数の電気信号を取得すること、
前記1つまたは複数の電気信号から前記パワー半導体の1つまたは複数のキーパラメータでのばらつきを検出すること、および
前記1つまたは複数のキーパラメータでの前記ばらつきに対応する駆動パターンを、前記1つまたは複数のキーパラメータでの前記ばらつきと前記駆動パターンの1つまたは複数の駆動パラメータとの間の予め決定された関係に基づいて生成することと、
各パワー半導体についての生成された複数の駆動パターンと、前記1つまたは複数のキーパラメータでの対応する前記ばらつきとをメモリに記憶することと
を備える、方法。
【請求項7】
各パワー半導体について、
基準駆動パターンの対応する複数の駆動パラメータとは異なる前記生成された駆動パターンの駆動パラメータの数を決定することと、
前記基準駆動パターンの前記対応する複数の駆動パラメータとは異なる駆動パラメータの前記数が閾値数よりも大きいかどうかを決定することと
をさらに備え、
ここにおいて、前記生成された複数の駆動パターンのうちの駆動パターンは、前記基準駆動パターンの前記対応する複数の駆動パラメータとは異なる前記駆動パターンの駆動パラメータの前記数が前記閾値数よりも大きい場合に記憶される、請求項6に記載の方法。
【請求項8】
前記1つまたは複数のキーパラメータのうちの1つは、ターンオン遅延時間を含み、ここにおいて、前記駆動パターンを生成することは、前記駆動パターンを生成するために基準駆動パターンの1つまたは複数のステップタイミングを適合させることを備える、請求項6に記載の方法。
【請求項9】
前記1つまたは複数の電気信号は、ゲート電圧波形とドレイン電流波形とを備え、ここにおいて、前記ターンオン遅延時間は、前記AGDが電圧を出力し始めるときとドレイン電流が流れ始めるときとの間の時間である、請求項8に記載の方法。
【請求項10】
アクティブゲートドライバ(AGD)を制御するための方法であって、
複数の予め決定された駆動パターンから第1の駆動パターンを使用して前記AGDを用いてパワー半導体を制御することと、ここにおいて、各予め決定された駆動パターンは、前記パワー半導体の1つまたは複数のキーパラメータでのばらつきに対応し、
前記パワー半導体の1つまたは複数の電気信号を取得することと、
前記1つまたは複数の電気信号に基づいて前記パワー半導体の1つまたは複数のキーパラメータでのばらつきを検出することと、
前記複数の予め決定された駆動パターンから、前記1つまたは複数のキーパラメータでの前記ばらつきに対応する第2の駆動パターンを選択することと、
前記第2の駆動パターンを使用して前記AGDを用いて前記パワー半導体を制御することと
を備える、方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクティブゲートドライブ(AGD)およびパワー半導体の分野に関する。特に、本発明は、アクティブゲートドライバによって駆動されるパワー半導体のばらつきを補正することができるアクティブゲートドライブから駆動パターンを生成するための方法およびシステムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
パワー半導体は、再生可能エネルギーシステムや電気自動車などの多くの産業用途で広く使用されている電子デバイスである。パワー半導体を実際に使用するために、ゲートドライバが、迅速、効率的、および安全にパワー半導体のオン/オフを切り替えるために必要な電圧および電流レベルを提供するために使用される。
【0003】
しかしながら、パワー半導体は、スイッチング性能に影響するキーパラメータでのばらつきの影響を受けやすく、応用システムで信頼性の問題をもたらしている。これらのパワー半導体のばらつきは、閾値電圧、相互コンダクタンス、寄生容量、ゲート抵抗などを含むが、これらに限定されない。
【0004】
これらのばらつきの原因は、製造および加工による物理的性質の変化、ならびに動作電圧および温度の変化を含む。このようなばらつきを補正し、パワー半導体の信頼性を保証することは、パワー半導体システムの商用化および産業上の利用のために重要である。
【0005】
したがって、そのようなばらつきが発生した場合のパワー半導体のスイッチング性能を改善する必要がある。
【0006】
単に例として添付の図面を参照されたい。
【図面の簡単な説明】
【0007】
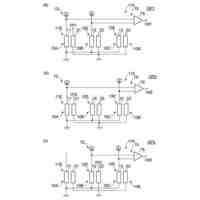
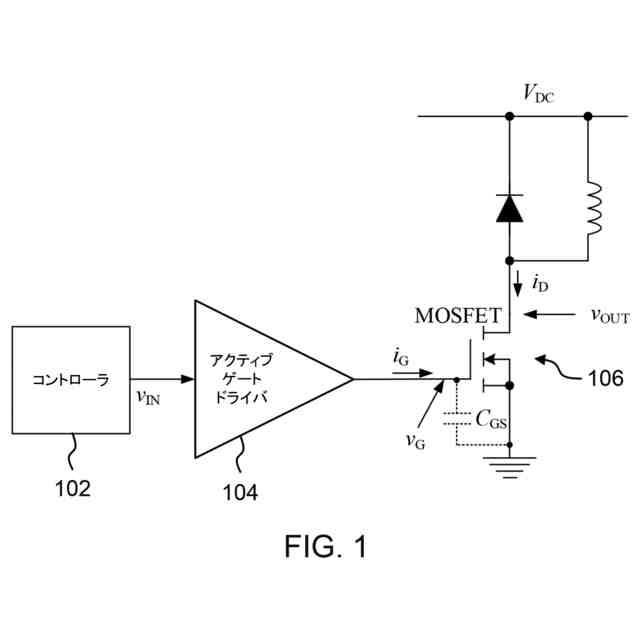
図1は、開ループアクティブゲートドライバの基本構造を示す。
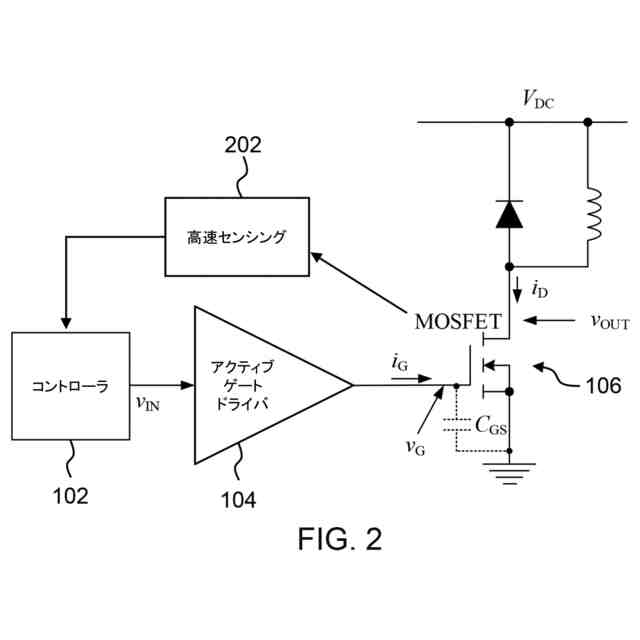
図2は、高速センシングを使用した閉ループアクティブゲートドライバを示す。
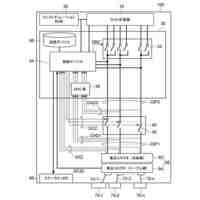
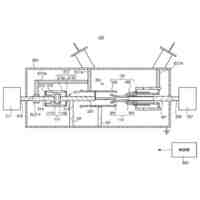
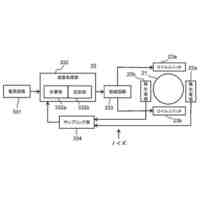
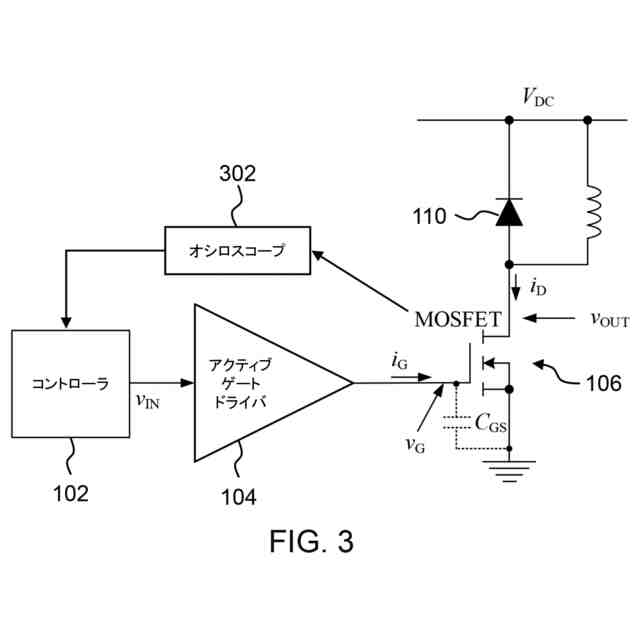
図3は、オシロスコープを使用した閉ループアクティブゲートドライバを示す。
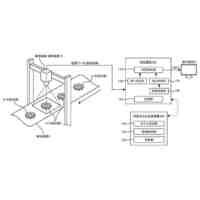
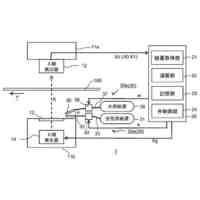
図4は、アクティブゲートドライバを用いるパワー半導体のための駆動パターンを開発するための提案された方法を示す。
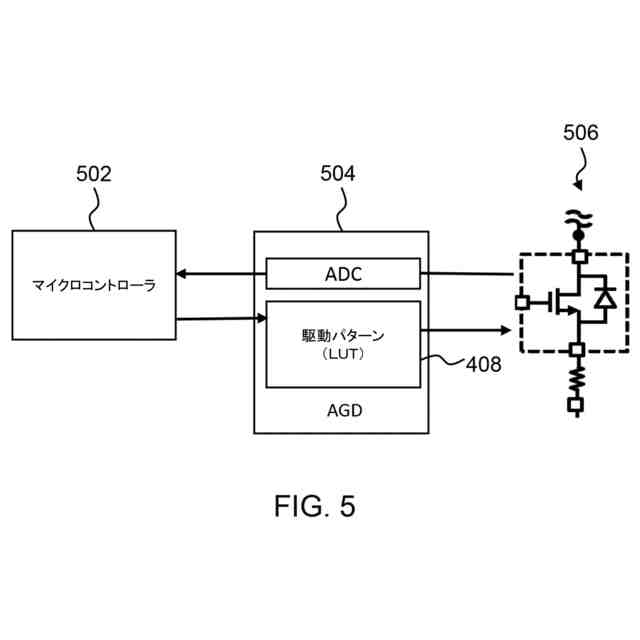
図5は、アクティブゲートドライバを用いるパワー半導体のための駆動パターンを選択するための提案された方法を示す。
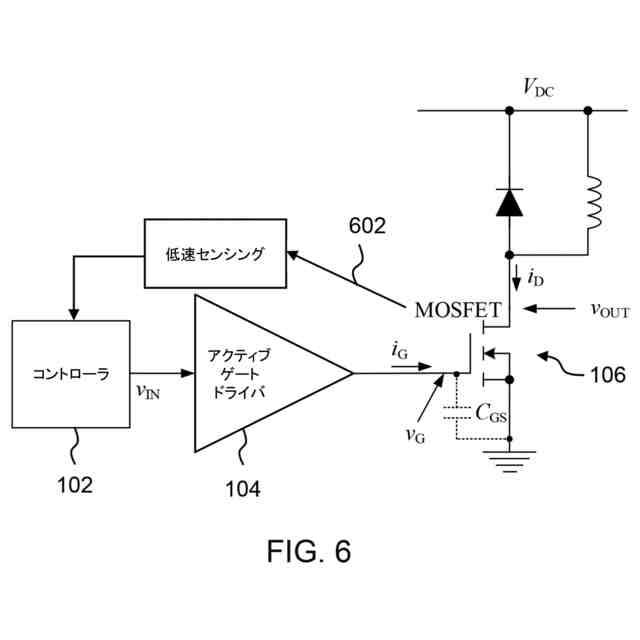
図6は、一実施形態による閉ループアクティブゲートドライバを示す。
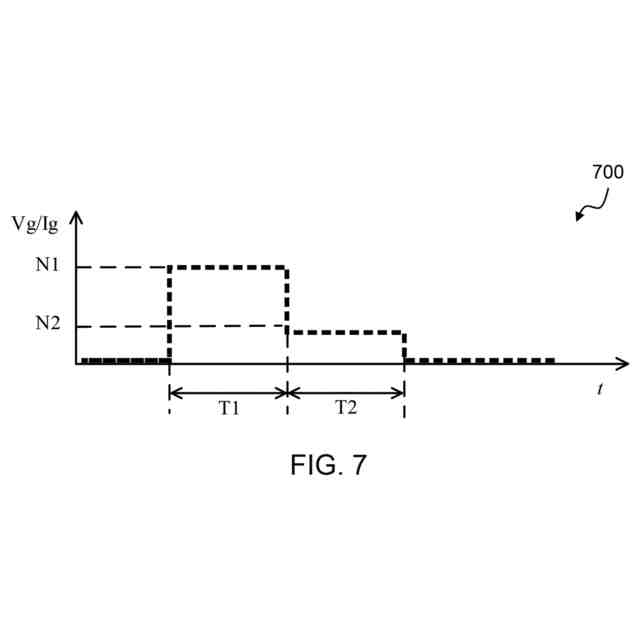
図7は、駆動パターン例を示す。
図8は、駆動パターン例を示す。
図9は、駆動パターン例を示す。
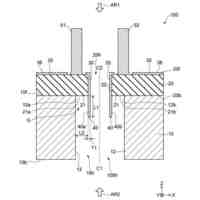
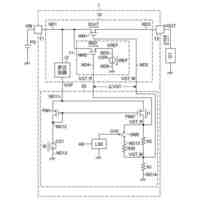
図10は、ダイオードと直列にされたMOSFETの回路図を示す。
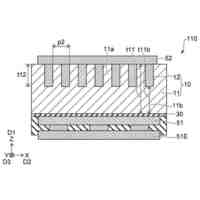
図11は、MOSFETの主要なスイッチング波形を示す。
【発明を実施するための形態】
【0008】
一実施形態によれば、アクティブゲートドライバ(AGD)の複数の駆動パターンを生成する方法が提供され、この方法は、AGDを用いて、複数の動作条件でパワー半導体を制御することを備える。各動作条件について、パワー半導体の1つまたは複数の電気信号が取得され、パワー半導体の1つまたは複数のキーパラメータでのばらつきが1つまたは複数の電気信号から検出され、1つまたは複数のキーパラメータでのばらつきに対応する駆動パターンが、1つまたは複数のキーパラメータでのばらつきと駆動パターンの1つまたは複数の駆動パラメータとの間の予め決定された関係に基づいて生成される。各動作条件についての生成された駆動パターンと、1つまたは複数のキーパラメータでの対応するばらつきとがメモリに記憶される。
【0009】
パワー半導体のキャリア移動度は、異なる動作条件で変化することがある。これにより、パワー半導体が動作する方法が変化する。しかしながら、動作条件の差異によるパワー半導体の変化を測定することは、使用中に実行できないことが多い。これらの変化は、パワー半導体のキーパラメータ(例えば、電気的特性)にばらつきをもたらすことが多い。しかしながら、使用中にパワー半導体のキーパラメータを直接測定することは実現が難しいことも多い。代わりに、パワー半導体のキーパラメータでのばらつきを検出するために、パワー半導体からの電気信号(例えば、電圧、電流など)が使用され得る。したがって、電気信号はキーパラメータでのばらつきについてのばらつき指標として機能する。
【0010】
キーパラメータでのばらつきについての駆動パターンを記憶することにより、それらの駆動パターンは、後で、AGDを備えるデバイスによって、キーパラメータでのばらつきが検出されたときに最も適切な駆動パターンを選択し、または必要に応じて選択された駆動パターンを微調整するために使用され得る。この結果、新しい駆動パターンを最初から導き出さなければならない場合と比較して、計算リソースが大幅に低減される。このように、駆動パターンを記憶することにより、複雑なコントローラ/コンピュータの使用を必要とせずに、最も適切な駆動パターンを生成することによって、デバイスがその動作を改善することを可能にする。これは、異なる動作条件に起因するパワー半導体のばらつきから生じ得るパワー半導体の異なるキーパラメータについて駆動パターンが生成されることを可能にする。したがって、キーパラメータでの対応するばらつきについて適切な駆動パターンが使用され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
モータ
1日前
株式会社東芝
センサ
1か月前
株式会社東芝
固定子
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
6日前
株式会社東芝
センサ
6日前
株式会社東芝
電子機器
3か月前
株式会社東芝
ドア構造
1か月前
株式会社東芝
電子装置
今日
株式会社東芝
回路素子
1か月前
株式会社東芝
金型構造
6日前
株式会社東芝
回転電機
3か月前
株式会社東芝
吸音装置
1日前
株式会社東芝
判定装置
3か月前
株式会社東芝
配線治具
2か月前
株式会社東芝
搬送装置
3か月前
株式会社東芝
燃料電池
2か月前
株式会社東芝
遮断装置
3か月前
株式会社東芝
X線厚み計
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
電磁流量計
2か月前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
ラック装置
1か月前
株式会社東芝
半導体装置
15日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
粒子加速器
今日
株式会社東芝
電動送風機
1か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
主幹制御器
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ