TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139997
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039119
出願日
2024-03-13
発明の名称
鞍乗り型電動車両
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B60L
7/08 20060101AFI20250919BHJP(車両一般)
要約
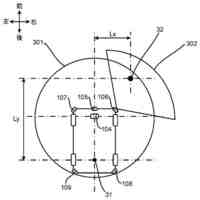
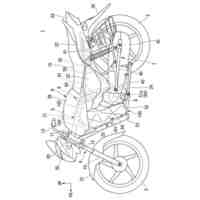
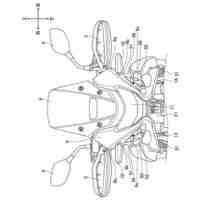
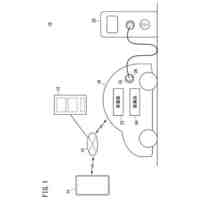
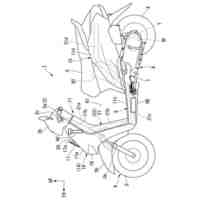
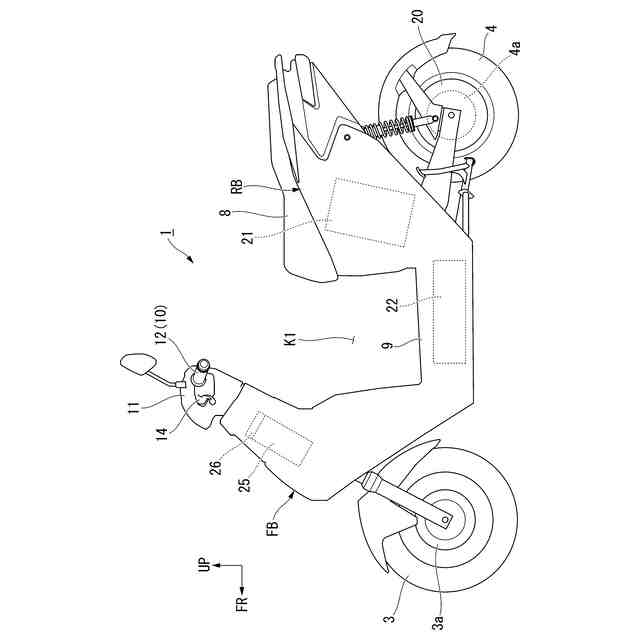
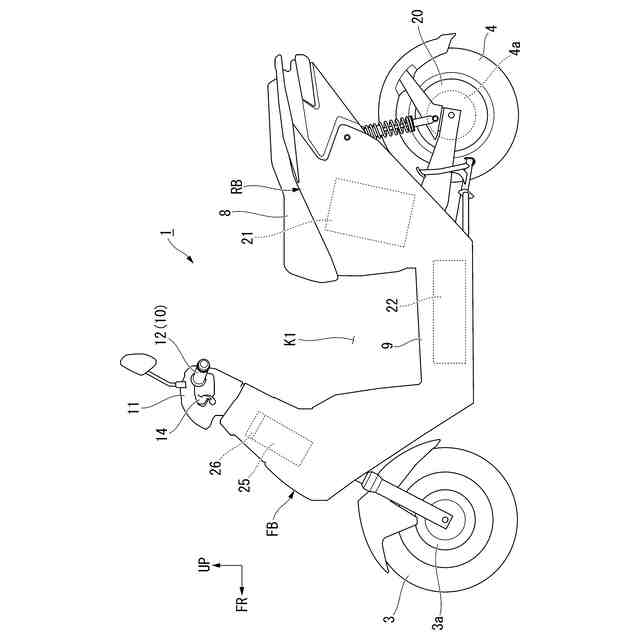
【課題】乗員の意図に沿った電動二輪車1の制御を実現する。
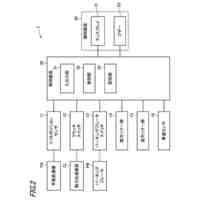
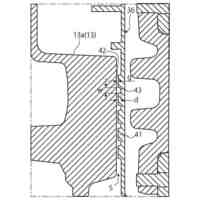
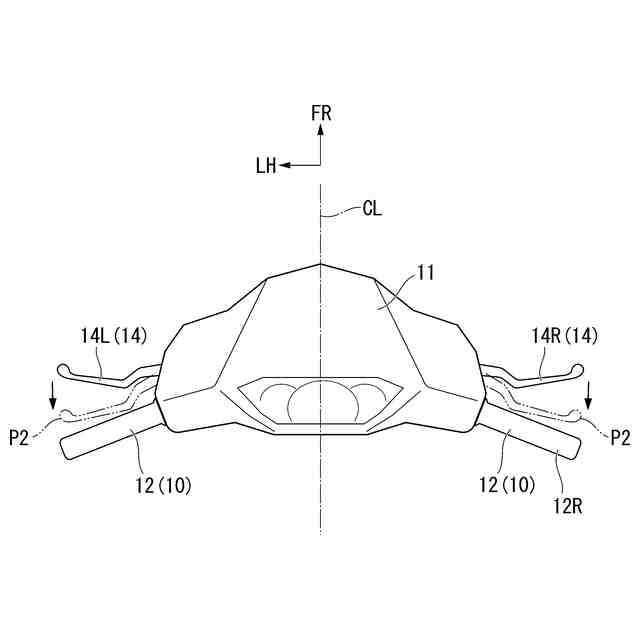
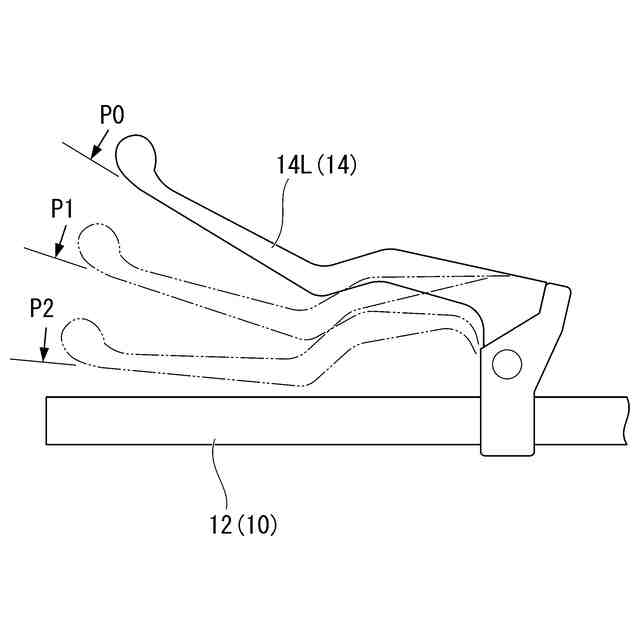
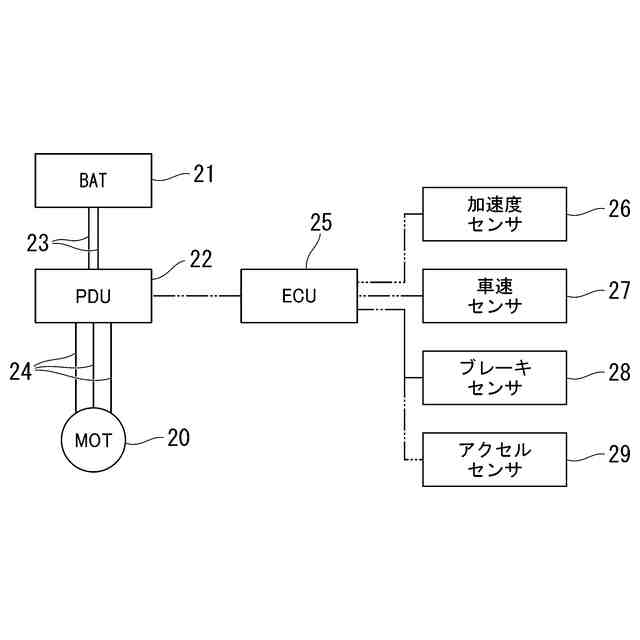
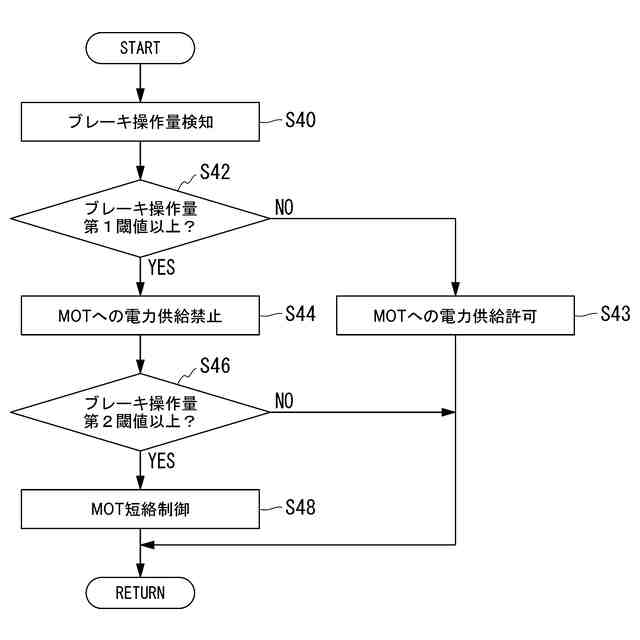
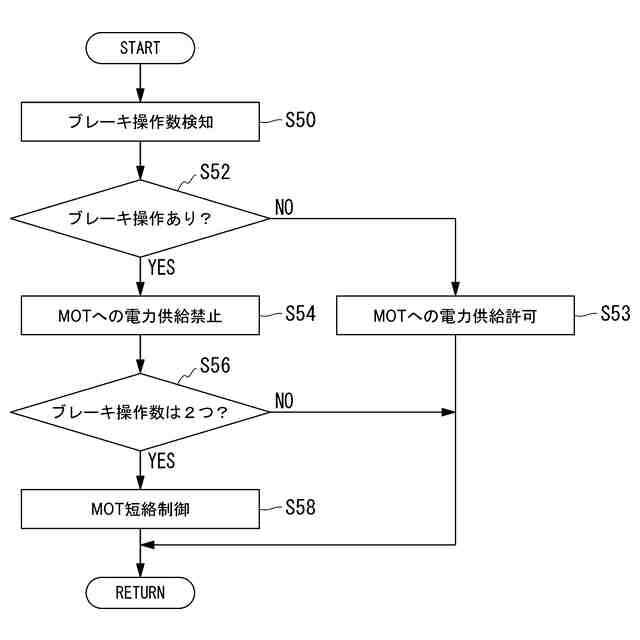
【解決手段】電動二輪車1は、電気モーター20と、ECU25と、ブレーキ操作子14と、を有する。電気モーター20は、電動二輪車1を走行させる。ECU25は、電気モーター20への電力供給を制御する。ブレーキ操作子14は、乗員に操作されてブレーキ装置3a,4aを作動させる。ECU25は、ブレーキ操作子14の操作量が第1閾値以上の場合に、ブレーキ操作子14の操作量に応じて、第1モードと第2モードとを切り替える。第1モードは、電気モーター20への電力供給を禁止するモードである。第2モードは、電気モーター20を短絡させるモードである。
【選択図】図1
特許請求の範囲
【請求項1】
車両を走行させる電動機(20)と、前記電動機(20)への電力供給を制御する制御装置(25)と、乗員(R)に操作されてブレーキ装置(3a,4a)を作動させるブレーキ操作子(14)と、を備える鞍乗り型電動車両(1)において、
前記制御装置(25)は、前記ブレーキ操作子(14)の操作量が閾値以上の場合に、前記ブレーキ操作子(14)の操作量に応じて、前記電動機(20)への電力供給を禁止する第1モードと、前記電動機(20)を短絡させる第2モードとを切り替える、鞍乗り型電動車両。
続きを表示(約 370 文字)
【請求項2】
車両を走行させる電動機(20)と、前記電動機(20)への電力供給を制御する制御装置(25)と、乗員(R)に操作されてブレーキ装置(3a,4a)を作動させる複数のブレーキ操作子(14)と、を備える鞍乗り型電動車両(1)において、
前記制御装置(25)は、前記複数のブレーキ操作子(14)のうち、前記ブレーキ操作子(14)の操作量が閾値以上である前記ブレーキ操作子(14)の数に応じて、前記電動機(20)への電力供給を禁止する第1モードと、前記電動機(20)を短絡させる第2モードとを切り替える、鞍乗り型電動車両。
【請求項3】
前記制御装置(25)は、前記ブレーキ操作子(14)の操作量が前記閾値未満の場合に、前記電動機(20)への電力供給を許可する、
請求項1または2に記載の鞍乗り型電動車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、鞍乗り型電動車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
原動機が電気モーターであるスクータ型の鞍乗り型電動車両において、誤発進防止装置として、ブレーキが操作されていないとアクセルを操作しても発進不可能とされる構成が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平6-328970号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年では、電気モーターの制御の一つとして、ブレーキ操作がなされているときは、アクセルが開かれても電気モーターを駆動させない(電気モーターへの電力供給を遮断する)という制御が行われるものがある。
【0005】
この構成では、例えば、車両が上り勾配のある路面でブレーキ操作をして停車した場合には、電気モーターへの電力供給がオフとなる。そのため、ブレーキ制動力が弱い車両の場合には、乗員の意図に反して車両が後退してしまう(ずり下がってしまう)可能性がある。そこで、電気モーターへの電力供給がオフとなる場合でも、乗員の意図に沿って車両の後退を抑制することが求められる。
【0006】
一方、勾配を利用して意図的に車両を後進させたいという乗員の意図を反映することで、使い勝手の良い車両を提供することも求められる。
【0007】
そこで本発明は、鞍乗り型電動車両において、乗員の意図に沿った車両の制御を実現することを目的とする。
【課題を解決するための手段】
【0008】
上記課題の解決手段として、本発明の態様1の鞍乗り型電動車両(1)は、車両を走行させる電動機(20)と、前記電動機(20)への電力供給を制御する制御装置(25)と、乗員(R)に操作されてブレーキ装置(3a,4a)を作動させるブレーキ操作子(14)と、を備える鞍乗り型電動車両(1)において、前記制御装置(25)は、前記ブレーキ操作子(14)の操作量が閾値以上の場合に、前記ブレーキ操作子(14)の操作量に応じて、前記電動機(20)への電力供給を禁止する第1モードと、前記電動機(20)を短絡させる第2モードとを切り替える。
【0009】
ブレーキ操作子の操作量に応じて、車両の制動に関する乗員の意図が異なる。第1モードでは、電動機への電力供給を禁止するに留まるので、車両に作用する制動力が小さい。第2モードでは、電動機を短絡させるので、車両に作用する制動力が大きい。制御装置は、ブレーキ操作子の操作量に応じて、第1モードと第2モードとを切り替える。これにより、乗員の意図に沿った車両の制御を実現することができる。
【0010】
本発明の態様2の鞍乗り型電動車両(1)は、車両を走行させる電動機(20)と、前記電動機(20)への電力供給を制御する制御装置(25)と、乗員(R)に操作されてブレーキ装置(3a,4a)を作動させる複数のブレーキ操作子(14)と、を備える鞍乗り型電動車両(1)において、前記制御装置(25)は、前記複数のブレーキ操作子(14)のうち、前記ブレーキ操作子(14)の操作量が閾値以上である前記ブレーキ操作子(14)の数に応じて、前記電動機(20)への電力供給を禁止する第1モードと、前記電動機(20)を短絡させる第2モードとを切り替える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
28日前
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
装置
3日前
本田技研工業株式会社
モータ
今日
本田技研工業株式会社
回転機械
27日前
本田技研工業株式会社
電解装置
11日前
本田技研工業株式会社
車両構造
今日
本田技研工業株式会社
内燃機関
3日前
本田技研工業株式会社
内燃機関
3日前
本田技研工業株式会社
車両構造
今日
本田技研工業株式会社
通知装置
3日前
本田技研工業株式会社
ロボット
26日前
本田技研工業株式会社
リアクトル
3日前
本田技研工業株式会社
鞍乗型車両
10日前
本田技研工業株式会社
触媒インク
28日前
本田技研工業株式会社
触媒インク
28日前
本田技研工業株式会社
潤滑システム
10日前
本田技研工業株式会社
車両制御装置
10日前
本田技研工業株式会社
固体二次電池
10日前
本田技研工業株式会社
鞍乗り型車両
18日前
本田技研工業株式会社
クラッチ装置
19日前
本田技研工業株式会社
鞍乗り型車両
20日前
本田技研工業株式会社
分離システム
今日
本田技研工業株式会社
動力伝達装置
25日前
本田技研工業株式会社
車両制御装置
12日前
本田技研工業株式会社
運転制御装置
今日
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
管理システム
1か月前
本田技研工業株式会社
電力変換装置
1か月前
本田技研工業株式会社
導体接合方法
1か月前
本田技研工業株式会社
位置推定装置
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
鞍乗り型車両
27日前
本田技研工業株式会社
車両制御装置
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ