TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135996
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034133
出願日
2024-03-06
発明の名称
車両制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
G08G
1/16 20060101AFI20250911BHJP(信号)
要約
【課題】シフトポジションとしてニュートラルポジションをとり得る手動変速機を備える車両において、車両の周辺に障害物がある旨の報知を適切に行うことを可能とする車両制御装置を提供する。
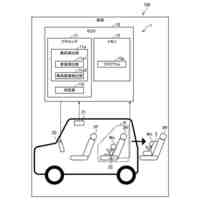
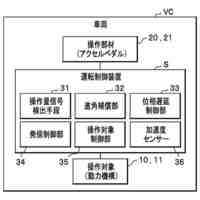
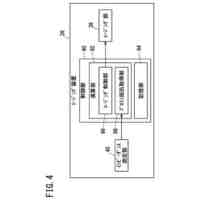
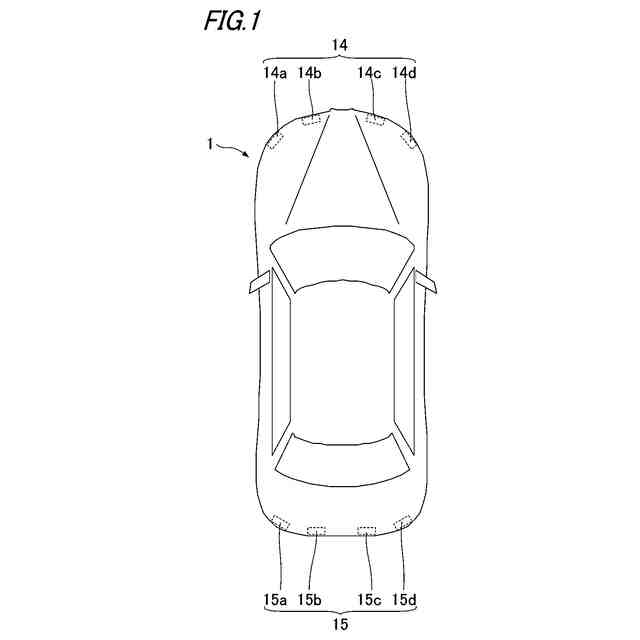
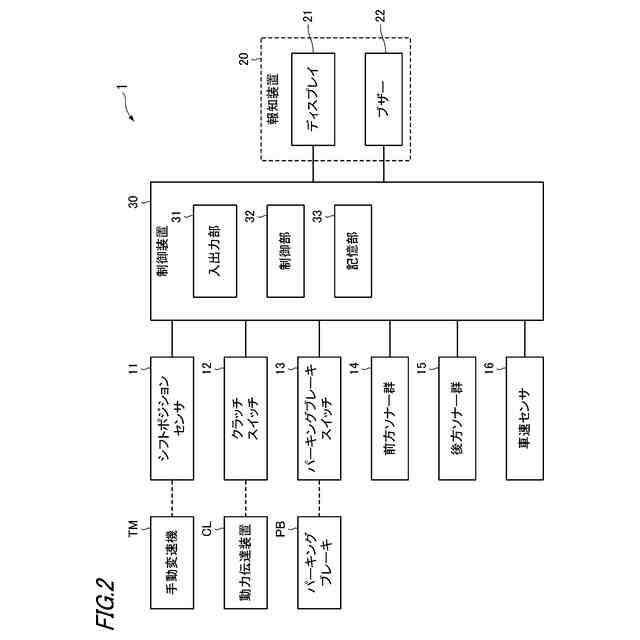
【解決手段】制御装置30は、車両1が備える前方ソナー群14および後方ソナー群15による障害物の検出結果と、車両1の走行速度Vと、手動変速機のシフトポジションとに基づいて、障害物がある旨の報知を行うか否かを判断し、報知を行うと判断したことに基づいて、報知装置20を介して報知を行う制御部32を備える。制御部32は、障害物が検出された場合に、走行速度Vが所定値以下であり、且つシフトポジションがニュートラルポジションであると、報知を行わないと判断する。
【選択図】図2
特許請求の範囲
【請求項1】
車両が備える外界センサによって前記車両の周辺に障害物が検出された場合に、前記車両が備える報知装置によって障害物がある旨の報知を行うことが可能に構成された前記車両を制御する車両制御装置であって、
前記車両は、シフトポジションとしてニュートラルポジションをとり得る手動変速機をさらに備え、
前記車両制御装置は、
前記障害物の検出結果と、前記車両の走行速度と、前記手動変速機のシフトポジションとに基づいて、前記報知を行うか否かを判断し、
前記報知を行うと判断したことに基づいて、前記報知装置を介して前記報知を行う、
処理を実行する制御部を備え、
前記制御部は、
前記障害物が検出された場合に、前記走行速度が所定値以下であり、且つ前記シフトポジションが前記ニュートラルポジションであると、前記報知を行わないと判断する、
車両制御装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記車両は、前記車両の駆動源により得られた動力を車輪へ伝達可能な動力伝達装置をさらに備え、
前記動力伝達装置は、前記車両を運転する運転者の操作に応じて、前記動力を伝達する伝達状態と、前記動力を伝達しない非伝達状態との間で切替可能に構成され、
前記制御部は、
さらに、前記動力伝達装置の状態に基づいて、前記報知を行うか否かを判断し、
前記障害物が検出された場合に、前記走行速度が前記所定値以下であり、且つ前記シフトポジションが前記ニュートラルポジションであり、且つ前記動力伝達装置が前記非伝達状態とされると、前記報知を行うと判断する、
車両制御装置。
【請求項3】
請求項2に記載の車両制御装置であって、
前記制御部は、
さらに、前記車両のパーキングブレーキの状態に基づいて、前記報知を行うか否かを判断し、
前記障害物が検出された場合に、前記走行速度が前記所定値以下であり、且つ前記シフトポジションが前記ニュートラルポジションであり、且つ前記動力伝達装置が前記非伝達状態とされており、且つ前記パーキングブレーキが作動状態であると、前記報知を行わないと判断する、
車両制御装置。
【請求項4】
請求項1に記載の車両制御装置であって、
前記車両は、
前記車両の周辺であって且つ前記車両の前方に前記障害物が検出された場合に、前記車両の前方に障害物がある旨の第1報知を行い、
前記車両の周辺であって且つ前記車両の後方に前記障害物が検出された場合に、前記車両の後方に障害物がある旨の第2報知を行うことが可能に構成され、
前記制御部は、
前記車両の前方に前記障害物が検出された場合に、前記走行速度と、前記シフトポジションとに基づいて、前記第1報知を行うか否かを判断し、前記第1報知を行うと判断したことに基づいて前記第1報知を行い、
前記車両の後方に前記障害物が検出された場合に、前記走行速度と、前記シフトポジションとに基づいて、前記第2報知を行うか否かを判断し、前記第2報知を行うと判断したことに基づいて前記第2報知を行う、
車両制御装置。
【請求項5】
請求項4に記載の車両制御装置であって、
前記車両は、前記車両の駆動源により得られた動力を車輪へ伝達可能な動力伝達装置をさらに備え、
前記動力伝達装置は、前記車両を運転する運転者の操作に応じて、前記動力を伝達する伝達状態と、前記動力を伝達しない非伝達状態との間で切替可能に構成され、
前記制御部は、
さらに、前記動力伝達装置の状態に基づいて、前記第1報知および前記第2報知のそれぞれを行うか否かを判断し、
前記車両の前方に前記障害物が検出された場合に、前記走行速度が前記所定値以下であり、且つ前記シフトポジションが前記ニュートラルポジションであり、且つ前記動力伝達装置が前記非伝達状態とされると、前記第1報知を行うと判断し、
前記車両の後方に前記障害物が検出された場合に、前記走行速度が前記所定値以下であり、且つ前記シフトポジションが前記ニュートラルポジションであり、且つ前記動力伝達装置が前記非伝達状態とされると、前記第2報知を行うと判断する、
車両制御装置。
【請求項6】
請求項5に記載の車両制御装置であって、
前記制御部は、
前記車両の前方に前記障害物が検出された場合に、前記シフトポジションが後進ポジションであると、前記第1報知を行わないと判断し、
前記車両の後方に前記障害物が検出された場合に、前記シフトポジションが前進ポジションであると、前記第2報知を行わないと判断する、
車両制御装置。
【請求項7】
請求項4に記載の車両制御装置であって、
前記制御部は、
前記車両の前方に前記障害物が検出された場合に、前記所定値よりも高い走行速度で前記車両が前進すると、前記第1報知を行うと判断し、
前記車両の後方に前記障害物が検出された場合に、前記所定値よりも高い走行速度で前記車両が後進すると、前記第2報知を行うと判断する、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、脆弱な立場にある交通参加者にも配慮した持続可能な輸送システムへのアクセスを提供するための取り組みが活発化している。この取り組みの1つとして、交通の安全性や利便性を改善すべく、移動体(例えば自動車などの車両)における運転支援技術や自動運転技術に関する研究開発が行われている。
【0003】
運転支援技術の1つに、超音波センサを用いて車両周辺の障害物を検出し、このような障害物が検出された場合に、乗員(例えば運転者)に対して警報を行うといったものがある。
【0004】
また、下記特許文献1には、変速装置のシフトポジションがパーキングポジションである場合には超音波センサの選択処理を行わず、シフトポジションが後進ポジションである場合には制御対象とする超音波センサ(言い換えると、車両の周囲における障害物の検出に用いる超音波センサ)としてすべての超音波センサを選択し、車両が前進する場合には制御対象とする超音波センサに車両後部の超音波センサを含まないようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2010-230366号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
手動変速機を備える車両では、シフトポジションがニュートラルポジションとされることもある。従来技術にあっては、このようなニュートラルポジションをとり得る手動変速機を備える車両において、車両の周辺に障害物がある旨の報知を適切に行う観点で改善の余地があった。
【0007】
本発明は、シフトポジションとしてニュートラルポジションをとり得る手動変速機を備える車両において、車両の周辺に障害物がある旨の報知を適切に行うことを可能とする車両制御装置を提供する。そして、延いては、交通の安全性をより一層改善し、持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0008】
本発明の一態様は、
車両が備える外界センサによって前記車両の周辺に障害物が検出された場合に、前記車両が備える報知装置によって障害物がある旨の報知を行うことが可能に構成された前記車両を制御する車両制御装置であって、
前記車両は、シフトポジションとしてニュートラルポジションをとり得る手動変速機をさらに備え、
前記車両制御装置は、
前記障害物の検出結果と、前記車両の走行速度と、前記手動変速機のシフトポジションとに基づいて、前記報知を行うか否かを判断し、
前記報知を行うと判断したことに基づいて、前記報知装置を介して前記報知を行う、
処理を実行する制御部を備え、
前記制御部は、
前記障害物が検出された場合に、前記走行速度が所定値以下であり、且つ前記シフトポジションが前記ニュートラルポジションであると、前記報知を行わないと判断する、
車両制御装置である。
【発明の効果】
【0009】
本発明によれば、シフトポジションとしてニュートラルポジションをとり得る手動変速機を備える車両において、車両の周辺に障害物がある旨の報知を適切に行うことを可能とする車両制御装置を提供できる。
【図面の簡単な説明】
【0010】
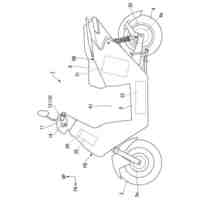
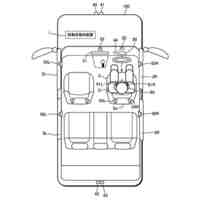
図1は、本実施形態の制御装置30によって制御される車両1の一例を示す上面図である。
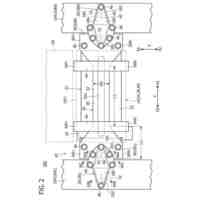
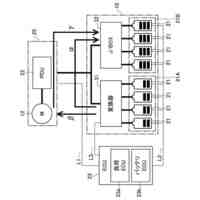
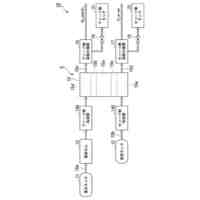
図2は、車両1の概略構成の一例を示すブロック図である。
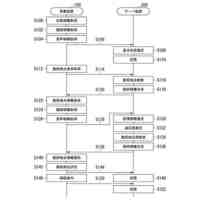
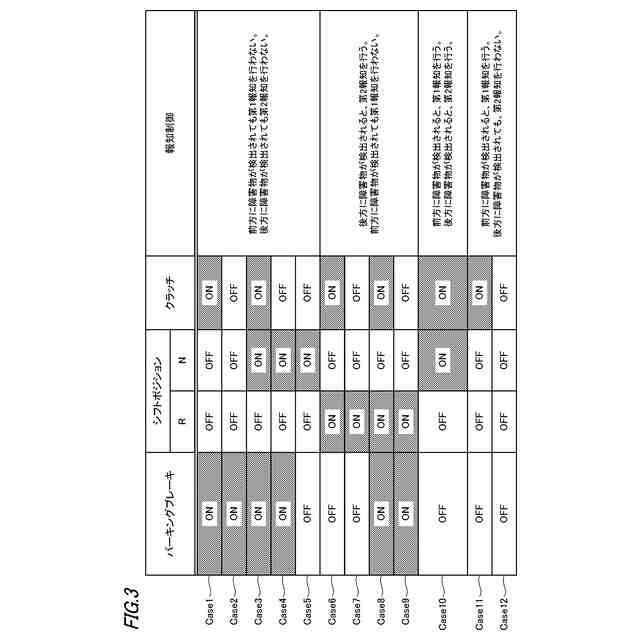
図3は、制御装置30が実行する報知制御の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
装置
4日前
本田技研工業株式会社
モータ
1日前
本田技研工業株式会社
通知装置
4日前
本田技研工業株式会社
車両構造
1日前
本田技研工業株式会社
内燃機関
4日前
本田技研工業株式会社
車両構造
1日前
本田技研工業株式会社
内燃機関
4日前
本田技研工業株式会社
リアクトル
4日前
本田技研工業株式会社
分離システム
1日前
本田技研工業株式会社
運転制御装置
1日前
本田技研工業株式会社
車両制御装置
5日前
本田技研工業株式会社
モータ支持構造
1日前
本田技研工業株式会社
能動型防振装置
1日前
本田技研工業株式会社
鞍乗り型電動車両
1日前
本田技研工業株式会社
鞍乗り型電動車両
1日前
本田技研工業株式会社
バッテリシステム
1日前
本田技研工業株式会社
水上移動体用推進装置
1日前
本田技研工業株式会社
水上移動体用推進装置
1日前
本田技研工業株式会社
水上移動体用推進装置
1日前
本田技研工業株式会社
水上移動体用推進装置
1日前
本田技研工業株式会社
水上移動体用推進装置
1日前
本田技研工業株式会社
EGRバルブ制御装置
1日前
本田技研工業株式会社
コンソールボックス構造
1日前
本田技研工業株式会社
水素同位体分離システム
4日前
本田技研工業株式会社
鞍乗型車両の端子保護構造
1日前
本田技研工業株式会社
鞍乗り型電動車両の車両構造
1日前
本田技研工業株式会社
全固体電池及びその製造方法
1日前
本田技研工業株式会社
制御装置、飛行体及び制御方法
1日前
本田技研工業株式会社
能動型防振装置及びその製造方法
1日前
本田技研工業株式会社
電気機器及び電気機器の制御方法
4日前
本田技研工業株式会社
エージング装置及びエージング方法
1日前
本田技研工業株式会社
表示装置、及び表示装置の制御方法
4日前
本田技研工業株式会社
移動体報知装置、及び移動体報知方法
1日前
本田技研工業株式会社
燃料製造方法、及び燃料製造システム
4日前
本田技研工業株式会社
制御装置、制御方法、およびプログラム
5日前
本田技研工業株式会社
情報提供プログラムおよび情報提供方法
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ