TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140756
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040322
出願日
2024-03-14
発明の名称
運転制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
B60W
50/08 20200101AFI20250919BHJP(車両一般)
要約
【課題】アクセルペダル操作を含め、運転者の操作速度に応じて操作対象の遅延制御を行うことで、操作性の向上を図ることができる運転制御装置を提供する。
【解決手段】運転者が操作することで操作部材20から出力される操作量信号を検出する操作量信号検出手段31と、運転者が操作部材20を操作する際の操作速度の範囲を示す操作周波数帯における位相遅延を補償するための進角補償を算出する進角補償部32と、操作量信号の遅延の位相を一定に維持するための位相遅延特性を算出する位相遅延制御部33と、を備え、操作量信号に進角補償と位相遅延特性を付与し、操作対象10を制御する制御量信号として発信する。
【選択図】図1
特許請求の範囲
【請求項1】
運転者が操作することで操作部材から出力される操作量信号を検出する操作量信号検出手段と、
該運転者が該操作部材を操作する際の操作速度の範囲を示す操作周波数帯における位相遅延を補償するための進角補償を算出する進角補償部と、
該操作量信号の位相遅延を一定に維持するための位相遅延特性を算出する位相遅延制御部と、
を備え、
該操作量信号に進角補償と位相遅延特性を付与し、操作対象を制御する制御量信号として発信する
ことを特徴とする運転制御装置。
続きを表示(約 420 文字)
【請求項2】
運転者が操作することで操作部材から出力される操作量信号を検出する操作量信号検出手段と、
該運転者が該操作部材を操作する際の操作速度の範囲を示す操作周波数帯における位相遅延を補償するための進角補償を算出する進角補償部と、
該操作周波数帯の低周波側と高周波側との間で、操作量信号の遅延の位相が線形に増減するように制御するための位相遅延特性を算出する位相遅延制御部と、
を備え、
該操作量信号に進角補償と位相遅延特性を付与し、操作対象を制御する制御量信号として発信する
ことを特徴とする運転制御装置。
【請求項3】
請求項1、または請求項2に記載の運転制御装置において、
前記進角補償部は、
位相0°を境に対称となる位相量を算出し、前記操作量信号から前記制御量信号までの位相遅延がなくなるように進角補償する
ことを特徴とする運転制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転者が運転する車両などの移動体の運転制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から内燃機関のようなアクセル操作から車両が加速するまでに比較的時間が掛かる装置に対して、レスポンスを向上するための技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-002330号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、内燃機関などに比べ、電動モーターは、レスポンスが早く、運転者のイメージよりも車両の加速が早く始まるため、運転者が操作を修正するケースが生じてしまう。
そして、修正操作が繰り返された場合には、操作性、および運転フィーリングが悪化してしまうという問題がある。
【0005】
本発明は、前述の点に鑑みてなされたものであり、アクセルペダル操作を含め、運転者の操作速度に応じて操作対象の遅延制御を行うことで、操作性の向上を図ることができる運転制御装置を提供することを目的とする。
そして、延いては交通の安全性をより一層改善して持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
前記の目的を達成するために、本発明に係る運転制御装置は、運転者が操作することで操作部材から出力される操作量信号を検出する操作量信号検出手段と、該運転者が該操作部材を操作する際の操作速度の範囲を示す操作周波数帯における位相遅延を補償するための進角補償を算出する進角補償部と、該操作量信号の位相遅延を一定に維持するための位相遅延特性を算出する位相遅延制御部と、を備え、該操作量信号に進角補償と位相遅延特性を付与し、操作対象を制御する制御量信号として発信することを特徴とする。
【発明の効果】
【0007】
本発明によれば、運転者による操作部材の操作速度に応じて操作対象の遅延制御を行うことで、操作性の向上を図ることができる運転制御装置を提供することができる。
そして、延いては交通の安全性をより一層改善して持続可能な輸送システムの発展に寄与することができる。
【図面の簡単な説明】
【0008】
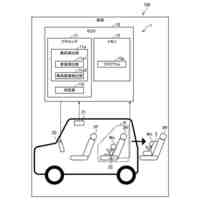
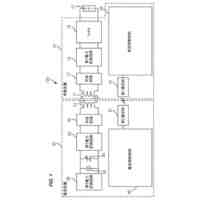
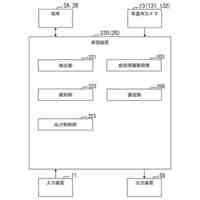
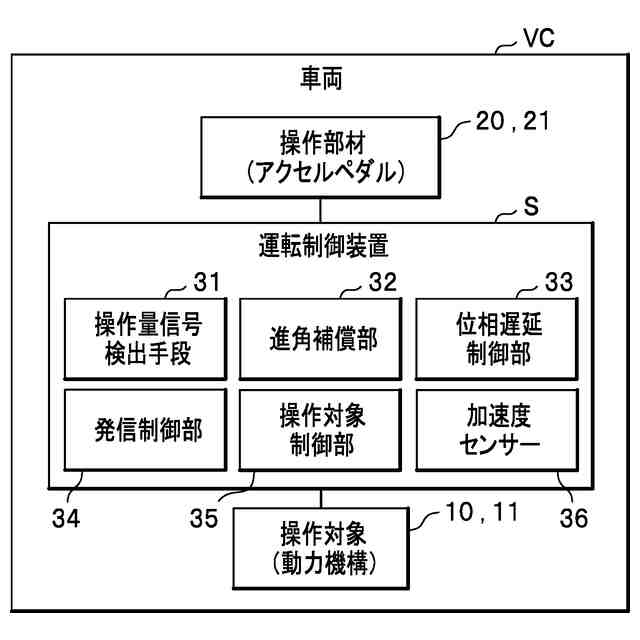
本実施形態の運転制御装置を示すブロック図である。
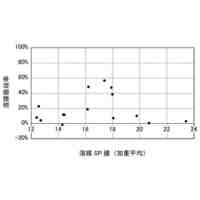
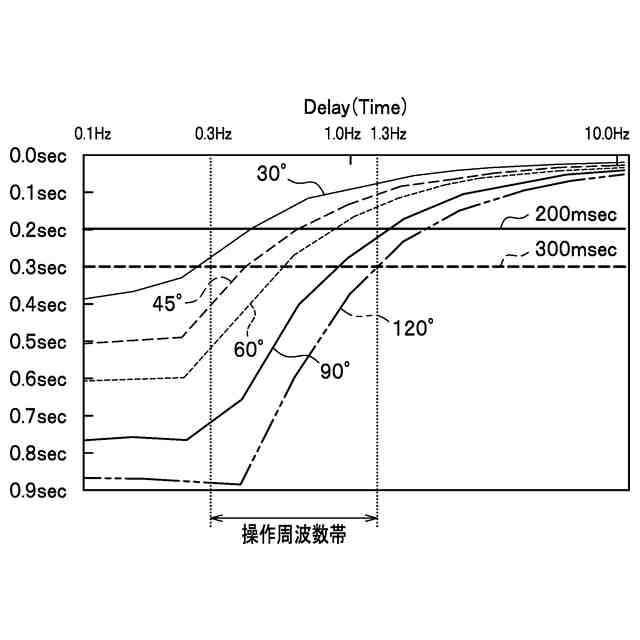
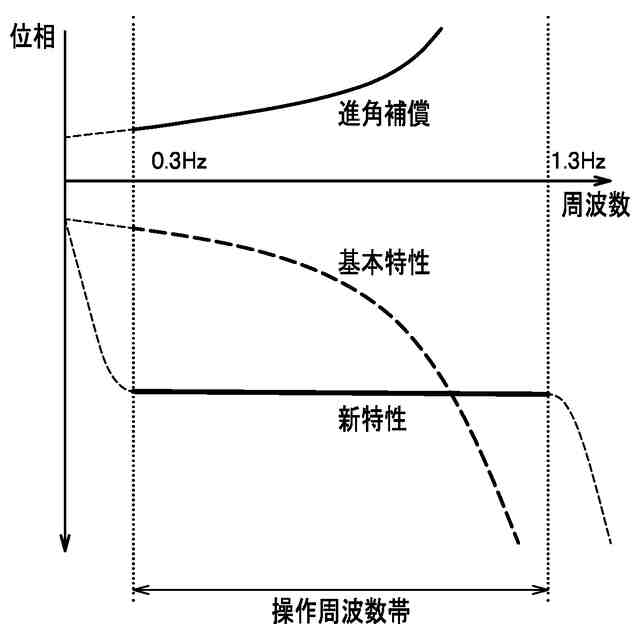
本実施形態の操作周波数帯における位相遅延の特性を示すグラフである。
本実施形態の操作周波数帯における位相遅延(時間)の特性を示すグラフである。
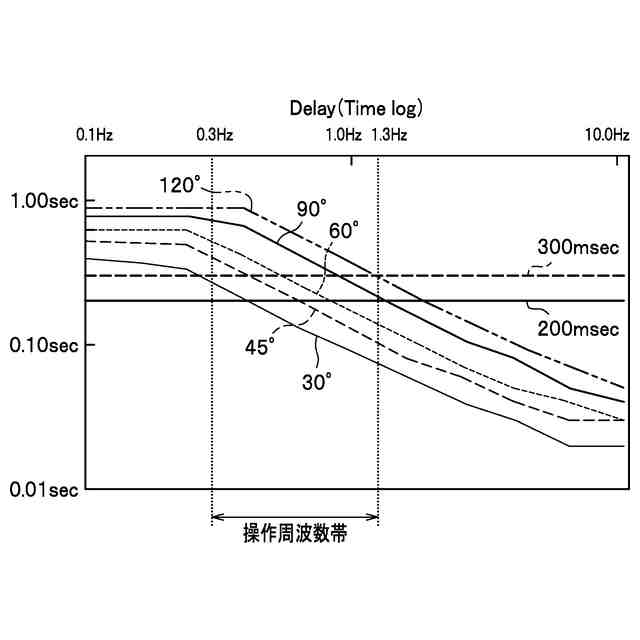
本実施形態の操作周波数帯における位相遅延(時間、対数表示)の特性を示すグラフである。
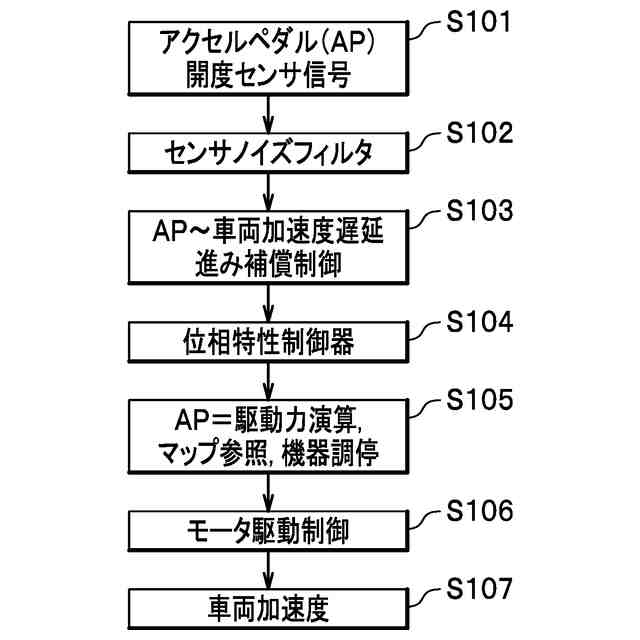
本実施形態の制御の流れを示すフローチャートである。
図5のフローチャート沿った特性グラフである。
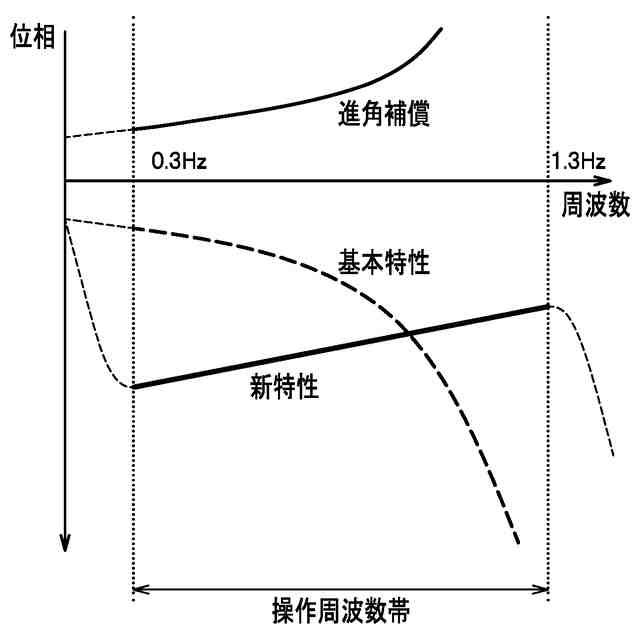
変形例の操作周波数帯における位相遅延の特性を示すグラフである。
【発明を実施するための形態】
【0009】
本発明の一実施形態の運転制御装置Sについて、図1~図6を参照して詳細に説明する。
なお、説明において、同一の要素には同一の符号を付し、重複する説明は省略する。
また、以下の説明においては、「前」「後」、「右」「左」、「上」「下」については、特別に断らない限り、車両前後方向における「前」「後」、車両左右方向における「右」「左」、車両上下方向における「上」「下」を指すものとする。
【0010】
本実施形態の運転制御装置Sは、車両VCなどの移動体を構成し、運転者による操作が、操作対象10に電気信号として伝達され、動作するもの、所謂バイワイヤと呼ばれる構成について、遅延を制御する(図1参照)。
なお、遅延とは、運転者が操作部材20の操作を始めてから、操作対象10が動作を始めて、加速度が変化するまでに掛かる時間である。
また、操作対象10としては、エンジン、およびモーター等の動力機構11、操舵角を調整する操舵機構(図示せず)等が挙げられる。
そして、動力機構11の操作部材20は、アクセルペダル21であり、操舵機構の操作部材20は、ステアリングハンドル(図示せず)である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
10日前
本田技研工業株式会社
装置
9日前
本田技研工業株式会社
モータ
6日前
本田技研工業株式会社
収納部
1か月前
本田技研工業株式会社
板ばね
1か月前
本田技研工業株式会社
保管装置
4日前
本田技研工業株式会社
通知装置
9日前
本田技研工業株式会社
積層装置
1か月前
本田技研工業株式会社
内燃機関
9日前
本田技研工業株式会社
保持装置
3日前
本田技研工業株式会社
内燃機関
9日前
本田技研工業株式会社
搬送装置
1か月前
本田技研工業株式会社
ロボット
1か月前
本田技研工業株式会社
車両構造
6日前
本田技研工業株式会社
車両構造
6日前
本田技研工業株式会社
受電装置
4日前
本田技研工業株式会社
送電装置
4日前
本田技研工業株式会社
断続装置
4日前
本田技研工業株式会社
固体電池
4日前
本田技研工業株式会社
バッテリ
3日前
本田技研工業株式会社
バッテリ
3日前
本田技研工業株式会社
会話装置
2日前
本田技研工業株式会社
保管装置
4日前
本田技研工業株式会社
回転機械
1か月前
本田技研工業株式会社
切断装置
2日前
本田技研工業株式会社
ステータ
2日前
本田技研工業株式会社
電解装置
17日前
本田技研工業株式会社
ロボット
1か月前
本田技研工業株式会社
鞍乗型車両
16日前
本田技研工業株式会社
触媒インク
1か月前
本田技研工業株式会社
リンク機構
2日前
本田技研工業株式会社
触媒インク
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
リアクトル
9日前
本田技研工業株式会社
導体接合方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ