TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141118
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040890
出願日
2024-03-15
発明の名称
マンコンベヤ
出願人
フジテック株式会社
代理人
弁理士法人ユニアス国際特許事務所
主分類
B66B
25/00 20060101AFI20250919BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】 ステップの走行速度を適切にすることができるマンコンベヤを提供する。
【解決手段】 マンコンベヤは、人を搬送するために走行するステップと、ステップが搬送する負荷を検出する負荷検出部と、ステップの走行速度を制御する処理装置と、を備え、処理装置は、第1運転制御と第2運転制御とを切り替え、第1運転制御は、負荷検出部で検出された負荷が第1設定値以上である場合に、ステップの最大走行速度を第1運転速度とし、負荷検出部で検出された負荷が第1設定値未満である場合に、ステップの最大走行速度を、第1運転速度よりも遅い第2運転速度とし、第2運転制御は、負荷検出部で検出された負荷に拘わらず、ステップの最大走行速度を、第2運転速度以下である第3運転速度とする。
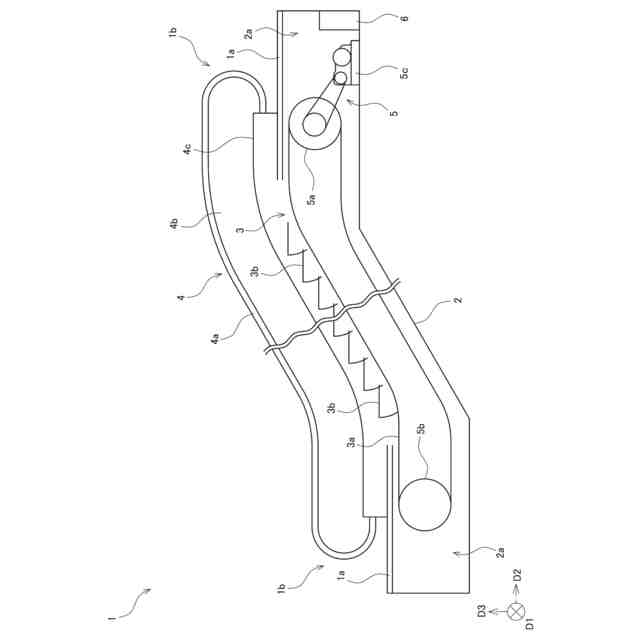
【選択図】 図3
特許請求の範囲
【請求項1】
人を搬送するために走行するステップと、
前記ステップが搬送する負荷を検出する負荷検出部と、
前記ステップの走行速度を制御する処理装置と、を備え、
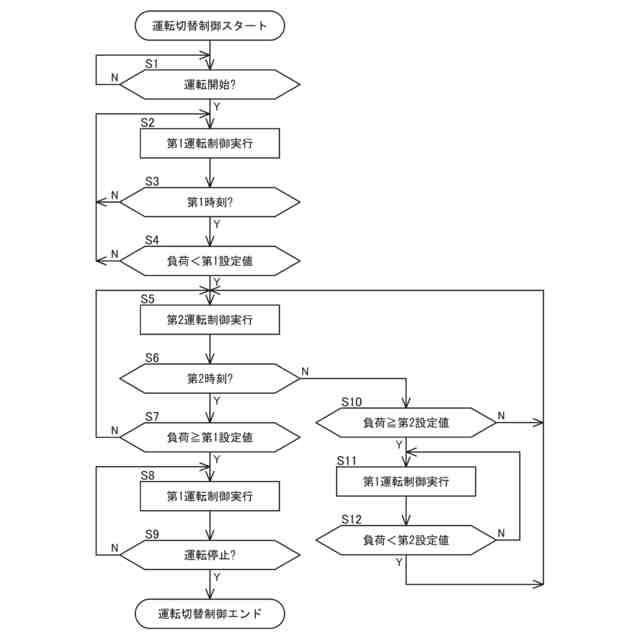
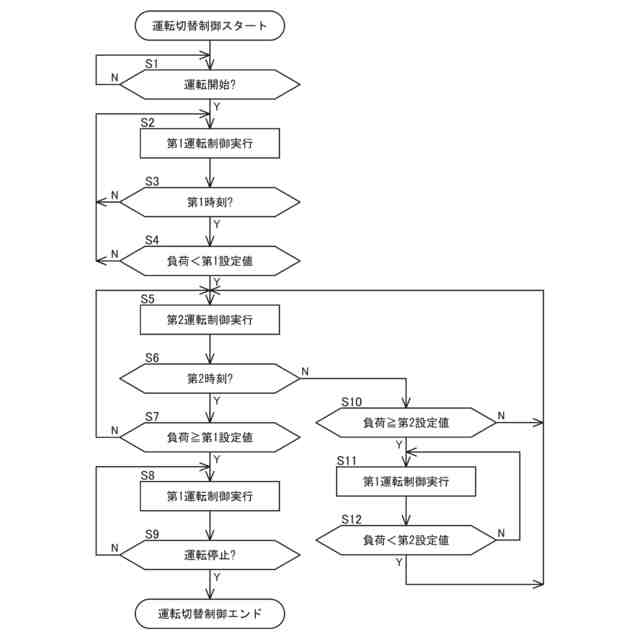
前記処理装置は、第1運転制御と第2運転制御とを切り替え、
前記第1運転制御は、前記負荷検出部で検出された負荷が第1設定値以上である場合に、前記ステップの最大走行速度を第1運転速度とし、前記負荷検出部で検出された負荷が前記第1設定値未満である場合に、前記ステップの最大走行速度を、前記第1運転速度よりも遅い第2運転速度とし、
前記第2運転制御は、前記負荷検出部で検出された負荷に拘わらず、前記ステップの最大走行速度を、前記第2運転速度以下である第3運転速度とする、マンコンベヤ。
続きを表示(約 430 文字)
【請求項2】
前記処理装置は、既定の時刻によって、前記第1運転制御と前記第2運転制御とを切り替える、請求項1に記載のマンコンベヤ。
【請求項3】
前記処理装置は、既定の第1時刻になった後に前記負荷検出部で検出された負荷が前記第1設定値未満である場合に、前記第1運転制御から前記第2運転制御へ切り替える、請求項2に記載のマンコンベヤ。
【請求項4】
前記処理装置は、既定の第2時刻になった後に前記負荷検出部で検出された負荷が前記第1設定値以上である場合に、前記第2運転制御から前記第1運転制御へ切り替える、請求項2又は3に記載のマンコンベヤ。
【請求項5】
前記処理装置は、前記第2運転制御を実行しているときに、前記負荷検出部で検出された負荷が前記第1設定値よりも大きい第2設定値以上になった場合に、前記第2運転制御から前記第1運転制御へ切り替える、請求項1~3の何れか1項に記載のマンコンベヤ。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、マンコンベヤに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、例えば、マンコンベヤは、人を搬送するために走行するステップと、ステップが搬送する負荷を検出する負荷検出部と、ステップの走行速度を制御する処理装置とを備えている(例えば、特許文献1)。特許文献1に係るマンコンベヤにおいては、負荷検出部で検出された負荷に応じて、ステップの走行速度は、変更されている。
【0003】
ところで、例えば、高齢者や子供がステップに乗るときに、ステップの走行速度が速い場合には、高齢者や子供がステップに乗り難いことがある。そこで、ステップが搬送する負荷だけでなく、例えば、高齢者や子供がマンコンベヤを利用することを考慮して、ステップの走行速度を適切にしたいという要望がある。
【先行技術文献】
【特許文献】
【0004】
特開2017-214180号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、課題は、ステップの走行速度を適切にすることができるマンコンベヤを提供することである。
【課題を解決するための手段】
【0006】
マンコンベヤは、
人を搬送するために走行するステップと、
前記ステップが搬送する負荷を検出する負荷検出部と、
前記ステップの走行速度を制御する処理装置と、を備え、
前記処理装置は、第1運転制御と第2運転制御とを切り替え、
前記第1運転制御は、前記負荷検出部で検出された負荷が第1設定値以上である場合に、前記ステップの最大走行速度を第1運転速度とし、前記負荷検出部で検出された負荷が前記第1設定値未満である場合に、前記ステップの最大走行速度を、前記第1運転速度よりも遅い第2運転速度とし、
前記第2運転制御は、前記負荷検出部で検出された負荷に拘わらず、前記ステップの最大走行速度を、前記第2運転速度以下である第3運転速度とする。
【図面の簡単な説明】
【0007】
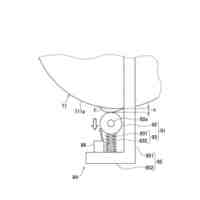
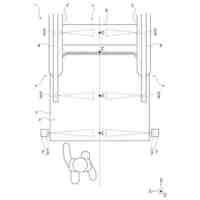
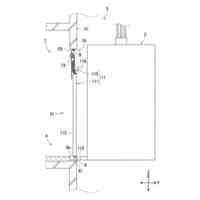
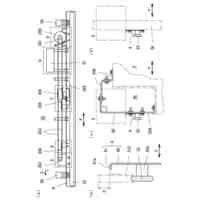
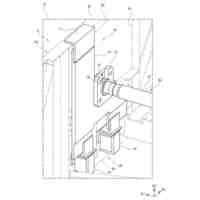
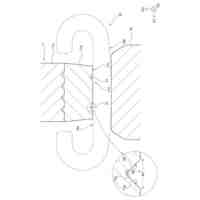
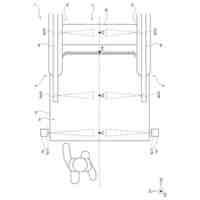
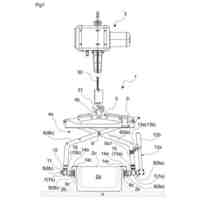
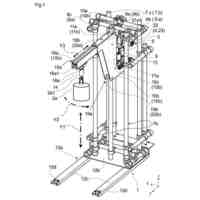
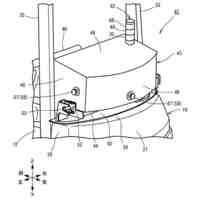
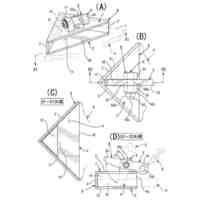
一実施形態に係るマンコンベヤの概要図
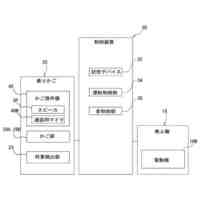
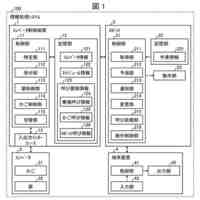
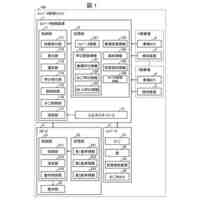
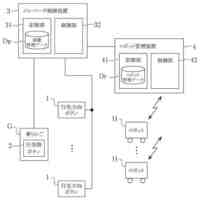
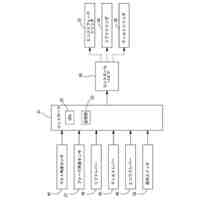
同実施形態に係るマンコンベヤの制御ブロック図
同実施形態に係るマンコンベヤの運転切替制御フロー図
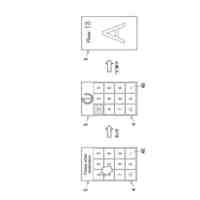
同実施形態に係る時刻と運転制御との関係図
他の実施形態に係る時刻と運転制御との関係図
【発明を実施するための形態】
【0008】
各図面において、構成要素の寸法は、例えば、理解を容易にするために、実際の寸法に対して拡大、縮小して示す場合があり、また、各図面の間での寸法比は、一致していない場合がある。なお、各図面において、例えば、理解を容易にするために、構成要素の一部を省略して示す場合がある。
【0009】
第1、第2等の序数を含む用語は、多様な構成要素を説明するために用いられるが、この用語は、一つの構成要素を他の構成要素から区別する目的でのみ用いられ、構成要素は、この用語によって特に限定されるものではない。なお、序数を含む構成要素の個数は、特に限定されず、例えば、一つでもよい場合がある。また、以下の明細書及び図面で用いられる序数は、特許請求の範囲に記載された序数と異なる場合がある。
【0010】
以下、マンコンベヤにおける一実施形態について、図1~図4を参照しながら説明する。なお、以下の実施形態は、マンコンベアの構成等の理解を助けるために例示するものであり、マンコンベヤの構成を限定するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
フジテック株式会社
エレベータ
12日前
フジテック株式会社
エレベータ
2日前
フジテック株式会社
エレベータ
12日前
フジテック株式会社
マンコンベヤ
2日前
フジテック株式会社
マンコンベヤ
2日前
フジテック株式会社
マンコンベヤ
6日前
フジテック株式会社
データ送信システム
23日前
フジテック株式会社
エレベータシステム
2日前
フジテック株式会社
エレベータの乗場構造
14日前
フジテック株式会社
エレベータの行先階登録装置
22日前
フジテック株式会社
情報処理システム、制御方法
2日前
フジテック株式会社
エレベータのかご及びエレベータ
6日前
フジテック株式会社
エレベータ制御システムおよび制御方法
14日前
フジテック株式会社
マンコンベヤ及びマンコンベヤの製造方法
6日前
フジテック株式会社
エレベータのかごドア開閉装置及びエレベータ
5日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
5日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
5日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
5日前
フジテック株式会社
マンコンベヤ手摺ベルト用回転体及びマンコンベヤ
12日前
フジテック株式会社
マンコンベヤ
2日前
個人
自走手摺
2か月前
ユニパルス株式会社
吊具
3か月前
個人
海上コンテナ昇降装置
9か月前
ユニパルス株式会社
吊具装置
10か月前
ユニパルス株式会社
荷役装置
8か月前
ユニパルス株式会社
リフト装置
4か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社豊田自動織機
産業車両
20日前
株式会社豊田自動織機
産業車両
10か月前
水戸工業株式会社
吊り具
5か月前
株式会社いうら
車椅子用昇降機
2か月前
株式会社豊田自動織機
荷役車両
9か月前
ユニパルス株式会社
荷役助力装置
3か月前
愛知製鋼株式会社
受け架台
1か月前
大栄産業株式会社
クランプ
4か月前
個人
垂直自動搬送機
21日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ