TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141664
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041692
出願日
2024-03-15
発明の名称
情報処理システム、制御方法
出願人
フジテック株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G06Q
10/109 20230101AFI20250919BHJP(計算;計数)
要約
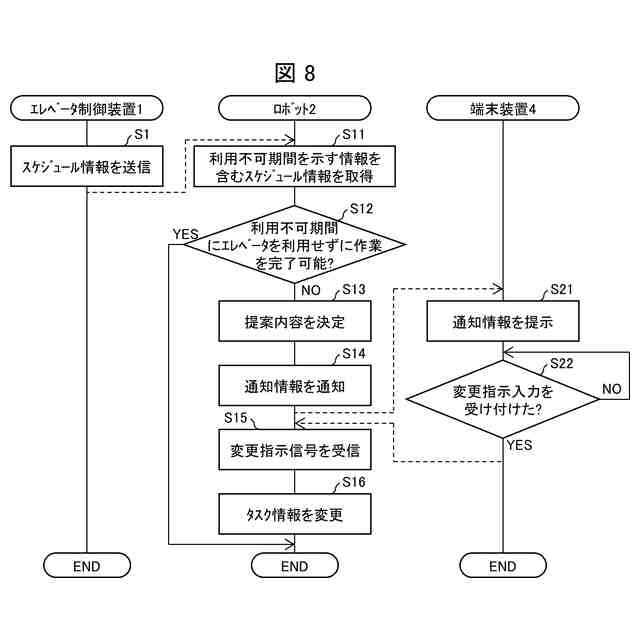
【課題】ロボットがエレベータを利用できない利用不可期間によって、ロボットの作業スケジュールが影響を受ける場合に、ロボット管理者にその旨を遅滞なく連絡する。
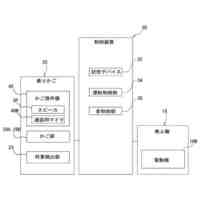
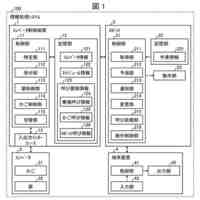
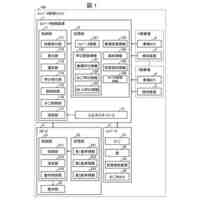
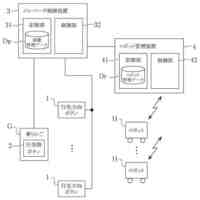
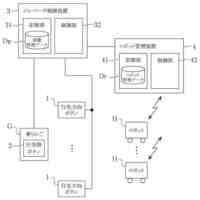
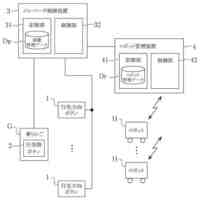
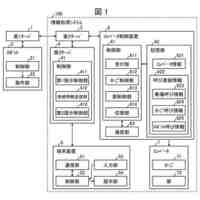
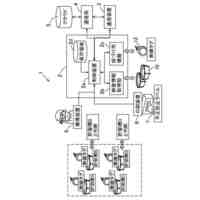
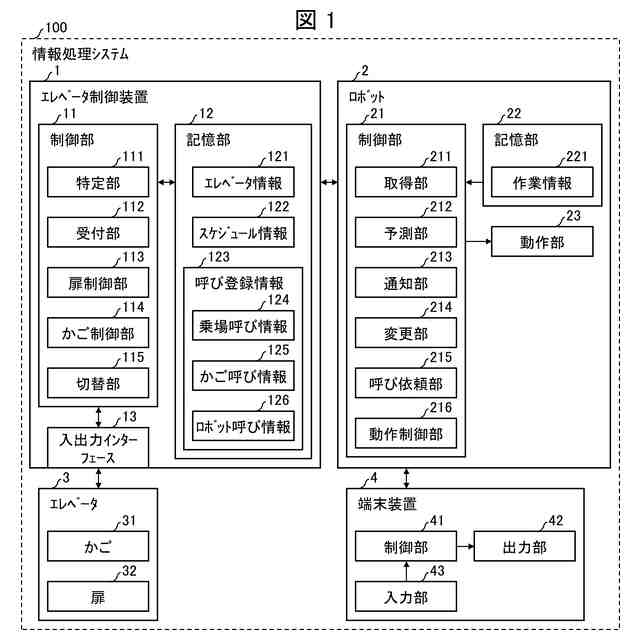
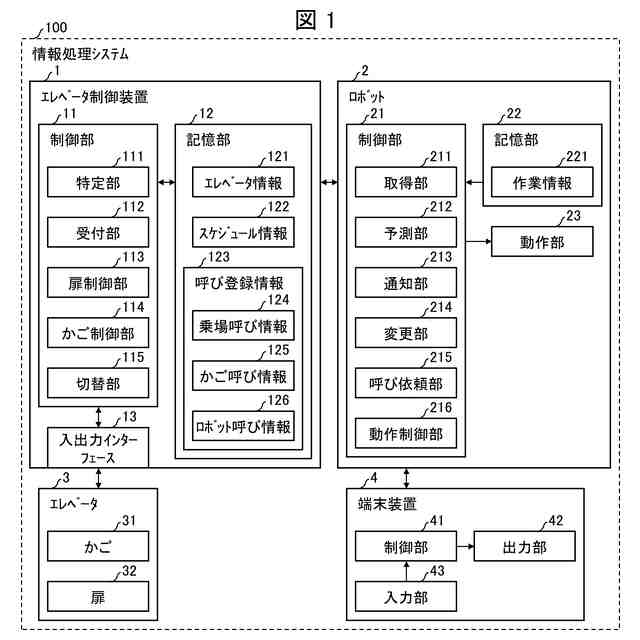
【解決手段】情報処理システム(100)は、自律走行可能なロボット(2)がエレベータ(3)を利用できない利用不可期間を示す情報を取得する取得部(211)と、ロボットが、エレベータの利用を伴う作業を予定している作業予定期間において、利用不可期間にエレベータを利用することなく作業を完了するか否かを予測する予測部(212)と、作業が完了しないと予測される場合、ロボットの管理者が使用する装置(4)に所定の通知情報を通知する通知部(213)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行可能なロボットがエレベータを利用できない利用不可期間を示す情報を取得する取得部と、
前記ロボットが、前記エレベータの利用を伴う作業を予定している作業予定期間において、前記利用不可期間に前記エレベータを利用することなく前記作業を完了するか否かを予測する予測部と、
前記作業が完了しないと予測される場合、前記ロボットの管理者が使用する装置に所定の通知情報を通知する通知部と、
を備える情報処理システム。
続きを表示(約 700 文字)
【請求項2】
前記予測部は、
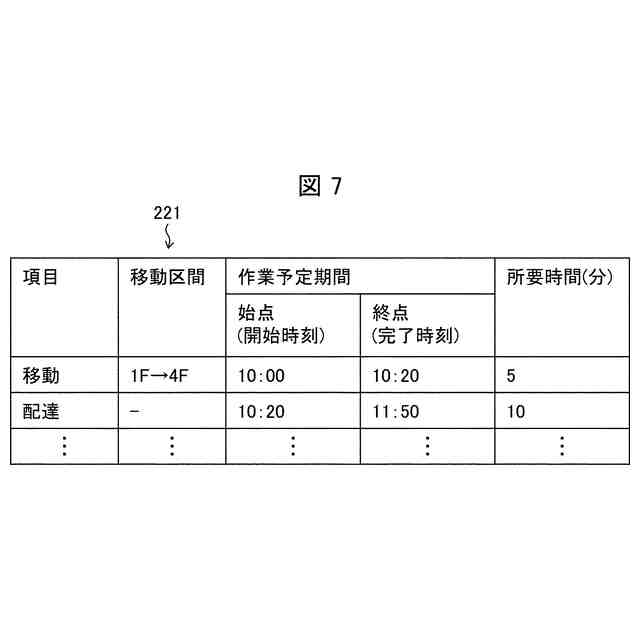
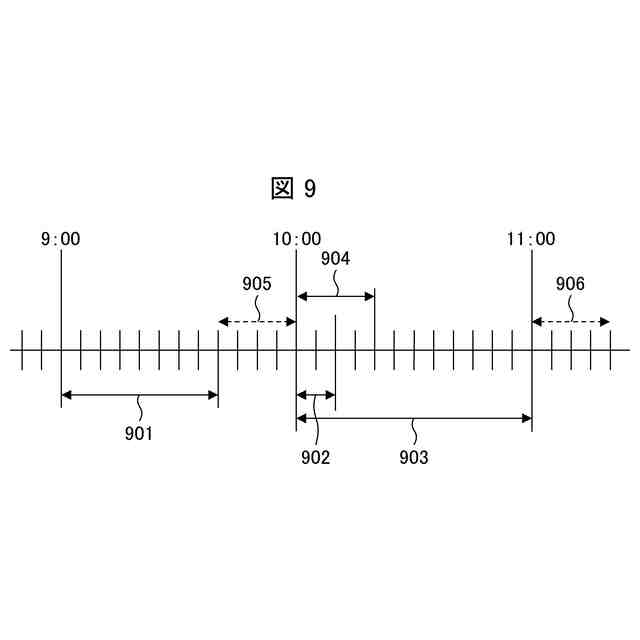
前記作業予定期間の始点から前記作業を開始すると、前記作業の完了時刻が前記作業予定期間の終点を超えると予測される場合、または、
前記作業予定期間の終点までに前記作業を完了するためには、前記作業の開始時刻を前記作業予定期間の始点より早めることを要すると予測される場合、
前記作業が完了しないと予測する、
請求項1に記載の情報処理システム。
【請求項3】
前記通知情報は、
前記利用不可期間に応じて前記作業予定期間の始点を早める提案、
前記利用不可期間に応じて前記作業予定期間の終点を遅らせる提案、および、
前記作業を中止する提案、の少なくともいずれかを含む、
請求項1に記載の情報処理システム。
【請求項4】
前記利用不可期間は、前記エレベータの点検実施期間、および前記エレベータを所定の利用者に利用させる専用運転期間の少なくともいずれかを含む、
請求項1に記載の情報処理システム。
【請求項5】
自律走行可能なロボットがエレベータを利用できない利用不可期間を示す情報を取得する取得ステップと、
前記ロボットが、前記エレベータの利用を伴う作業を予定している作業予定期間において、前記利用不可期間に前記エレベータを利用することなく前記作業を完了するか否かを予測する予測ステップと、
前記作業が完了しないと予測される場合、前記ロボットの管理者が使用する装置に所定の通知情報を通知する通知ステップと、
を含む情報処理システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、エレベータを利用するロボットを備える情報処理システム、および情報処理システムの制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、自律走行可能なロボットがエレベータを利用して階床間を移動し、作業する場合がある。例えば、ロボットによるエレベータの利用を制限する期間がある場合、ロボットの作業効率が低下する可能性がある。
【0003】
特許文献1には、ロボット呼び登録一時制限時間帯をロボットに通知し、当該ロボットからのロボット呼び登録一時制限待機要求に応じてロボット呼び登録一時制限時間帯を調整可能なエレベータシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7151865号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
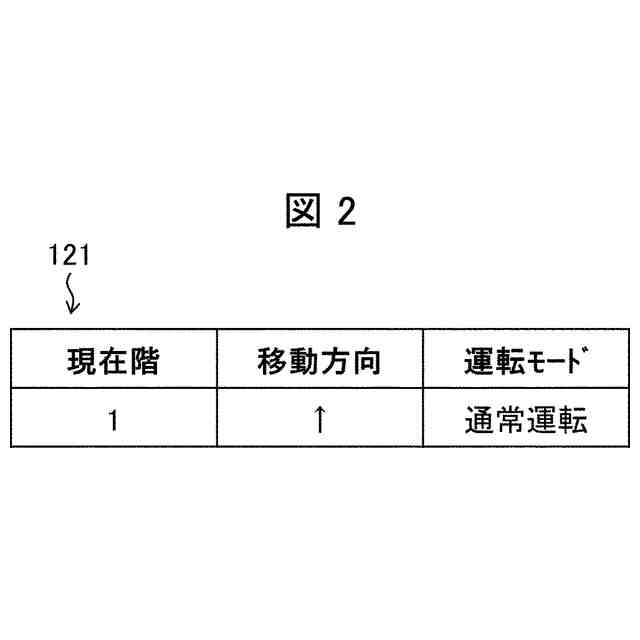
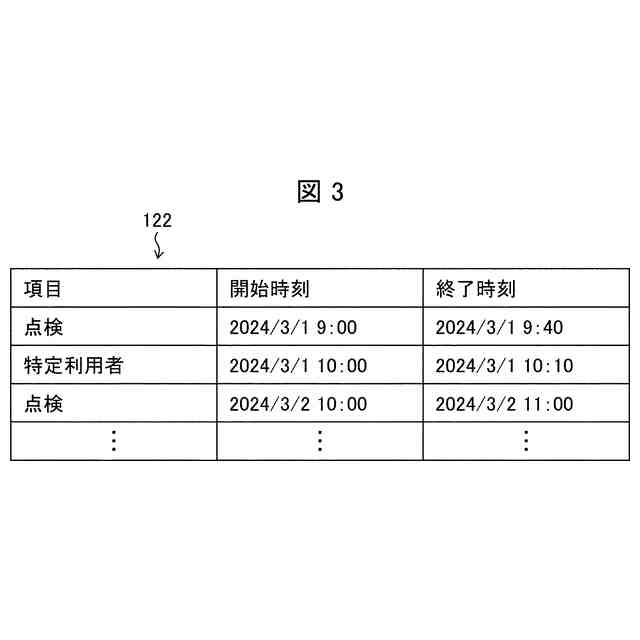
エレベータ制御装置は、エレベータの定期点検期間、運転休止期間(例えば、夜間などのパーキング休止を含む期間)、所定の利用者(例えば、VIPおよび引っ越し業者)向けに運転する専用運転期間などの登録を受け付ける。これらの期間は、ロボットがエレベータを利用できない利用不可期間となる。利用不可期間をロボットの作業スケジュールに合わせて調整したり変更したりすることは一般的に困難であり、ロボットの作業スケジュールに変更を加える必要が生じる。
【0006】
ロボットの作業スケジュールは、当該ロボットを管理するロボット管理者によって策定され、その遂行の責任はロボット管理者が負う。それゆえ、エレベータを利用できない利用不可期間によって当初の作業スケジュールが影響を受ける場合、ロボットは、ロボット管理者にその旨を遅滞なく連絡し、ロボット管理者が、当該ロボットの作業スケジュールの変更または中止を決定することが望ましい。
【0007】
本発明の一態様は、ロボットがエレベータを利用できない利用不可期間によって、ロボットの作業スケジュールが影響を受ける場合に、ロボット管理者にその旨を遅滞なく連絡することが可能な情報処理システムおよび情報処理方法等の実現を目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明の一態様に係る情報処理システムは、自律走行可能なロボットがエレベータを利用できない利用不可期間を示す情報を取得する取得部と、前記ロボットが、前記エレベータの利用を伴う作業を予定している作業予定期間において、前記利用不可期間に前記エレベータを利用することなく前記作業を完了するか否かを予測する予測部と、前記作業が完了しないと予測される場合、前記ロボットの管理者が使用する装置に所定の通知情報を通知する通知部と、を備える。
【0009】
上記の課題を解決するために、本発明の一態様に係る情報処理システムの制御方法は、自律走行可能なロボットがエレベータを利用できない利用不可期間を示す情報を取得する取得ステップと、前記ロボットが、前記エレベータの利用を伴う作業を予定している作業予定期間において、前記利用不可期間に前記エレベータを利用することなく前記作業を完了するか否かを予測する予測ステップと、前記作業が完了しないと予測される場合、前記ロボットの管理者が使用する装置に所定の通知情報を通知する通知ステップと、を含む。
【0010】
本発明の各態様に係る情報処理システムは、コンピュータによって実現してもよく、この場合には、コンピュータを前記情報処理システムが備える各部(ソフトウェア要素)として動作させることにより前記情報処理システムをコンピュータにて実現させる情報処理システムの制御プログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
フジテック株式会社
エレベータ
10日前
フジテック株式会社
エレベータ
今日
フジテック株式会社
エレベータ
26日前
フジテック株式会社
エレベータ
10日前
フジテック株式会社
マンコンベヤ
4日前
フジテック株式会社
マンコンベヤ
今日
フジテック株式会社
マンコンベヤ
今日
フジテック株式会社
乗客コンベア
28日前
フジテック株式会社
乗客コンベア
27日前
フジテック株式会社
エレベータシステム
今日
フジテック株式会社
データ送信システム
21日前
フジテック株式会社
エレベータの乗場構造
12日前
フジテック株式会社
乗客コンベアシステム
1か月前
フジテック株式会社
エレベータの制御システム
21日前
フジテック株式会社
エレベータの制御システム
21日前
フジテック株式会社
情報処理システム、制御方法
今日
フジテック株式会社
エレベータの行先階登録装置
20日前
フジテック株式会社
エレベータのかご及びエレベータ
4日前
フジテック株式会社
エレベータ制御システムおよび制御方法
12日前
フジテック株式会社
マンコンベヤ及びマンコンベヤの製造方法
4日前
フジテック株式会社
エレベータのかごドア開閉装置及びエレベータ
3日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
3日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
3日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
3日前
フジテック株式会社
異常通知システム、異常通知システムの制御方法
21日前
フジテック株式会社
マンコンベヤ手摺ベルト用回転体及びマンコンベヤ
10日前
フジテック株式会社
情報処理システムおよび情報処理システムの制御方法
21日前
フジテック株式会社
マンコンベヤ
今日
フジテック株式会社
デマケーションコム、当該デマケーションコムを有するエスカレータ用踏段、および当該踏段を備えたエスカレータ
26日前
個人
裁判のAI化
2か月前
個人
フラワーコートA
1か月前
個人
工程設計支援装置
1か月前
個人
情報処理システム
2か月前
個人
検査システム
2か月前
個人
冷凍食品輸出支援構造
25日前
個人
為替ポイント伊達夢貯
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ