TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142985
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042643
出願日
2024-03-18
発明の名称
ジャイロセンサ及び復調回路
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G01C
19/5726 20120101AFI20250924BHJP(測定;試験)
要約
【課題】性能を向上させることができるジャイロセンサ及び復調回路を提供する。
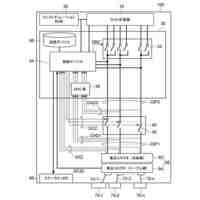
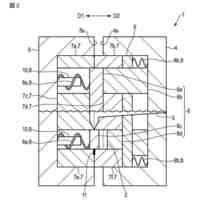
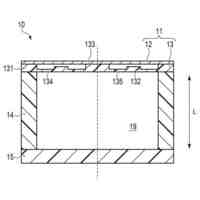
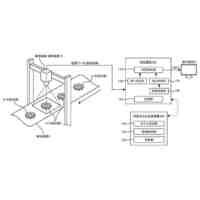
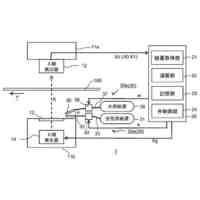
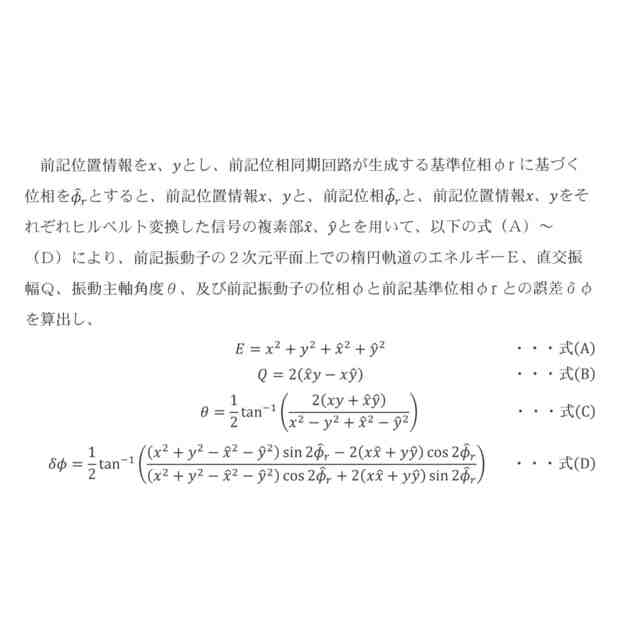
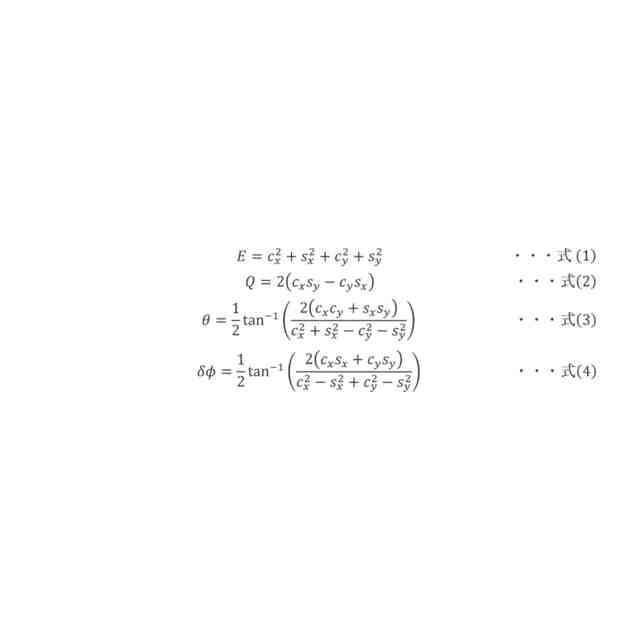
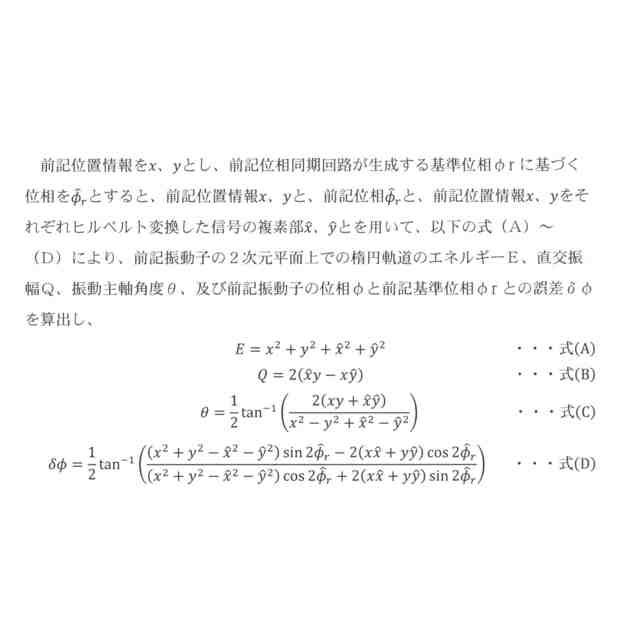
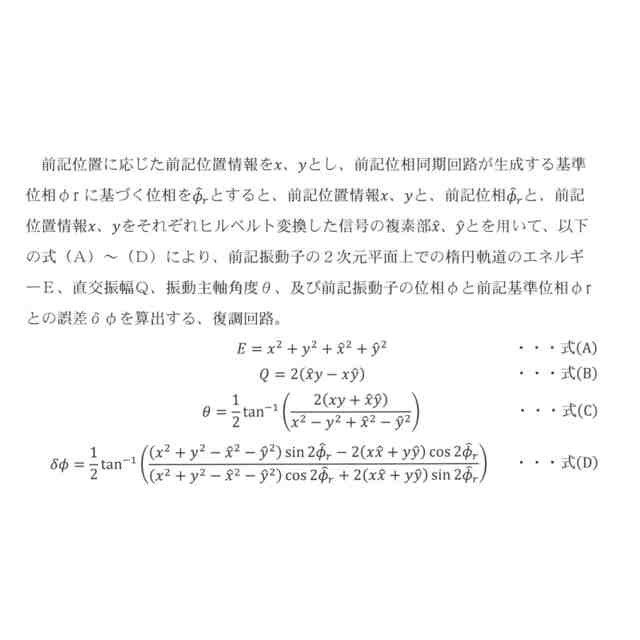
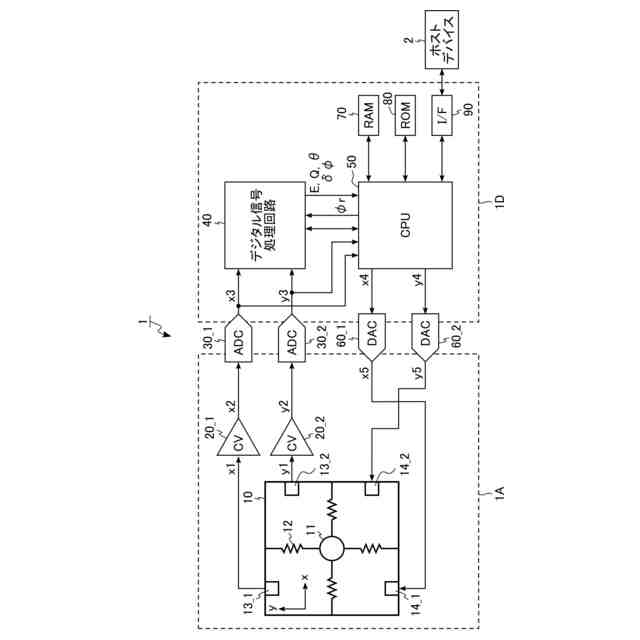
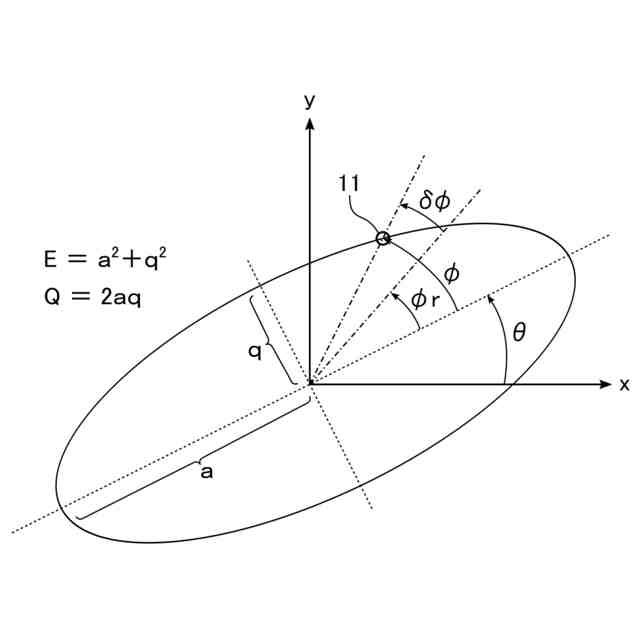
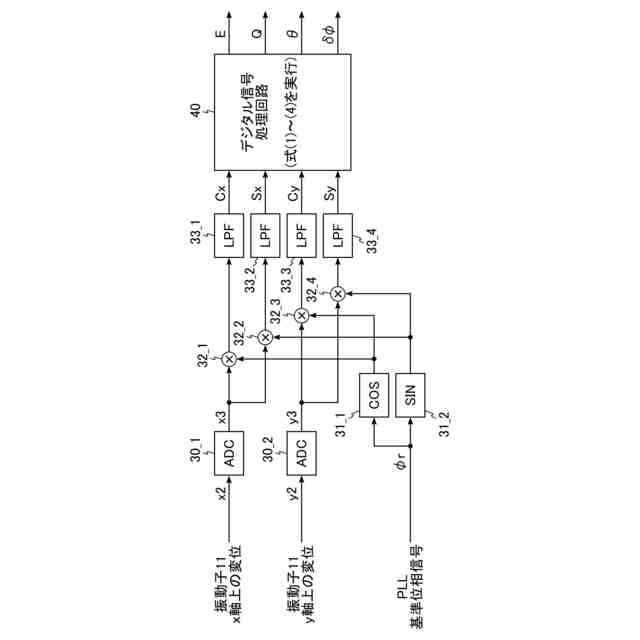
【解決手段】実施形態のジャイロセンサは、振動子11、バネ要素12、振動子の2次元平面上での位置を検出するセンサ13、及び振動子に駆動力を印加するアクチュエータ14を含むMEMS10と、振動子の2次元平面上での位相を追従する位相同期回路を含み、センサにより検出された位置に応じた位置情報に基づいて、振動子に印加する駆動力を算出する処理回路40とを備える。処理回路は、位置情報、位相同期回路が生成する基準位相に基づく位相、及び位置情報をそれぞれヒルベルト変換した信号の複素部を用いて、式(A)~(D)により、振動子の2次元平面上での楕円軌道のエネルギー、直交振幅、振動主軸角度、及び前記振動子の位相と基準位相との誤差を算出し、エネルギー、直交振幅、振動主軸角度、及び誤差に基づいて駆動力を算出する。
【選択図】図4
特許請求の範囲
【請求項1】
振動子と、前記振動子を支持するバネ要素と、前記振動子の2次元平面上での位置を検出するセンサと、前記振動子に駆動力を印加するアクチュエータと、を含むMEMSと、
前記振動子の2次元平面上での位相φを追従するための位相同期回路を含み、前記センサにより検出された前記位置に応じた位置情報に基づいて、前記振動子に印加する駆動力を算出する処理回路と、
を備え、
前記処理回路は、
JPEG
2025142985000005.jpg
91
170
前記エネルギーE、前記直交振幅Q、前記振動主軸角度θ、前記誤差δφに基づいて前記駆動力を算出する、ジャイロセンサ。
続きを表示(約 1,100 文字)
【請求項2】
前記処理回路は、FIR(Finite Impulse Response)フィルタ及び遅延回路を含み、
前記FIRフィルタは、前記位置情報をヒルベルト変換した信号の前記複素部を算出し、
前記遅延回路は、前記FIRフィルタによってヒルベルト変換された前記信号の前記複素部に生じる位相遅れ分、前記位置情報と、前記基準位相とを遅延させる、
請求項1に記載のジャイロセンサ。
【請求項3】
前記センサに検出された前記位置に応じた第1信号を第1電圧に変換する第1変換回路と、
前記第1変換回路により変換された前記第1電圧をデジタル信号の前記位置情報に変換する第2変換回路と、
をさらに備える、
請求項1に記載のジャイロセンサ。
【請求項4】
第3変換回路をさらに備え、
前記処理回路は、算出した前記駆動力に応じた第2信号を出力し、
前記第3変換回路は、前記第2信号をアナログ信号の第2電圧に変換し、
前記アクチュエータは、前記第2電圧に応じて前記駆動力を前記振動子に印加する、
請求項1に記載のジャイロセンサ。
【請求項5】
前記処理回路は、前記振動子の前記位置情報に基づいて前記駆動力を算出し、前記駆動力を前記振動子に印加させることにより、前記振動子を第1振幅で一直線状に振動させる制御を行う、
請求項1に記載のジャイロセンサ。
【請求項6】
前記センサは、
対向する電極を有し、
前記振動子の前記位置に応じた前記電極の静電容量を検出し、前記静電容量に応じた信号を出力する、
請求項1に記載のジャイロセンサ。
【請求項7】
前記処理回路は、DSP(Digital Signal Processor)を含み、
前記DSPは、前記式(A)、(B)、(C)及び(D)を実行する、
請求項1に記載のジャイロセンサ。
【請求項8】
前記処理回路は、FPGA(Field-Programmable Gate Array)を含み、
前記FPGAは、前記式(A)、(B)、(C)及び(D)を実行する、
請求項1に記載のジャイロセンサ。
【請求項9】
前記処理回路は、CPU(Central Processing Unit)を含み、
前記CPUは、前記式(A)、(B)、(C)及び(D)を実行する、
請求項1に記載のジャイロセンサ。
【請求項10】
前記ジャイロセンサは、レート積分型ジャイロスコープを含む、
請求項1に記載のジャイロセンサ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ジャイロセンサ及び復調回路に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
MEMS(Micro Electro Mechanical Systems:微小電気機械システム)で作成された角度直接検出型ジャイロセンサあるいはレート積分型ジャイロスコープ(Rate Integrating Gyroscope、以下RIG)などのジャイロセンサでは、振動子と同じ素子上の電極への印加電圧を制御することにより、振動子をx-y平面上で所望の振幅で一直線上に振動させ続け、疑似的にフーコーの振り子を実現している。この制御では、振動子のx-y平面上での軌跡(楕円軌道の長・短軸振幅、楕円軌道の傾き、振動子の楕円軌道上での位相)の情報を、検出されたx軸、y軸方向の振動子の位置信号から復調する必要がある。復調方法の1つとして、振動子の位相を検出する位相同期回路(Phase Locked Loop、以下、PLL)を用いた同期検波方式が良く用いられている。しかしながら、この手法では、PLLが収束するまで楕円軌道の長・短軸振幅や楕円軌道の傾きの復調が不正確になったり、PLLの制御ループと振動子の励振制御ループとが干渉を起こしたりする場合がある。
【先行技術文献】
【非特許文献】
【0003】
D. D Lynch. “Vibratory gyro analysis by the method of averaging”. In: Proc. 2nd St. Petersburg Conf. on Gyroscopic Technology and Navigation, St. Petersburg. 1995, pp. 26-34.
【発明の概要】
【発明が解決しようとする課題】
【0004】
性能を向上させることができるジャイロセンサ及び復調回路を提供する。
【課題を解決するための手段】
【0005】
実施形態のジャイロセンサは、振動子、前記振動子を支持するバネ要素、前記振動子の2次元平面上での位置を検出するセンサ、及び前記振動子に駆動力を印加するアクチュエータを含むMEMSと、前記振動子の2次元平面上での位相φを追従するための位相同期回路を含み、前記センサにより検出された前記位置に応じた位置情報に基づいて、前記アクチュエータに印加する駆動力を算出する処理回路とを備える。前記処理回路は、
【0006】
JPEG
2025142985000002.jpg
91
170
【0007】
前記エネルギーE、前記直交振幅Q、前記振動主軸角度θ、前記誤差δφに基づいて前記駆動力を算出する。
【図面の簡単な説明】
【0008】
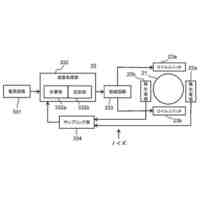
実施形態に係るジャイロセンサの構成を示すブロック図である。
実施形態に係る振動子のx-y平面上での軌跡と復調情報を模式的に表した図である。
比較例を示す構成図である。
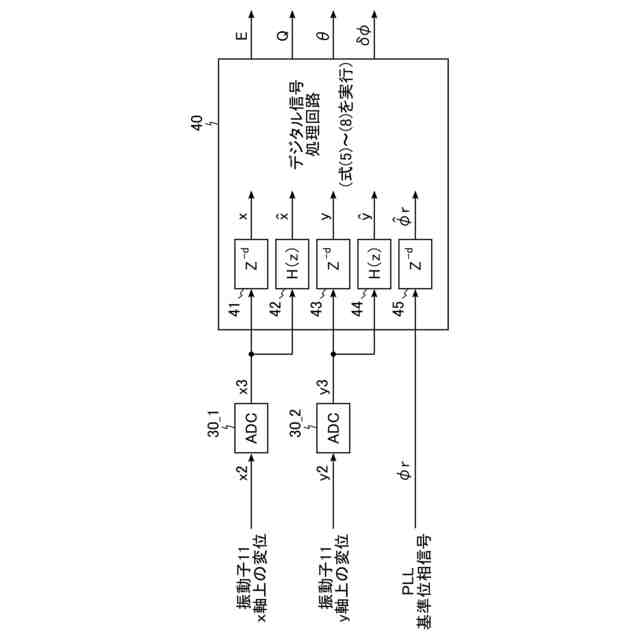
実施形態に係るジャイロセンサにおける復調手法を示す構成図である。
実施形態に係るジャイロセンサにおける復調手法を含む動作の流れを示すフローチャートである。
x-y平面上における振動子の軌跡をプロットした図である。
ヒルベルト変換フィルタとLPFにおけるゲイン特性、及び位相遅れ量を示す図である。
実施形態と比較例において復調された復調情報示す図である。
実施形態と比較例において復調された復調情報示す図である。
ヒルベルト変換フィルタとLPFの過渡応答が収束した出力部分のE値を示す図である。
ヒルベルト変換フィルタにおけるゲインがフラットな部分のゲインリップルを示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して実施形態について説明する。以下の説明において、同一の機能及び構成を有する構成要素については、共通する参照符号を付し、さらに、共通する参照符号の末尾に文字又は数字を付加する場合がある。また、以下に示す実施形態は、この実施形態の技術的思想を具体化するための装置や方法を例示するものであって、構成部品の材質、形状、構造、及び配置等を下記のものに特定するものではない。
【0010】
以下に、実施形態のジャイロセンサについて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
モータ
1日前
株式会社東芝
センサ
1か月前
株式会社東芝
固定子
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
6日前
株式会社東芝
センサ
6日前
株式会社東芝
電子機器
3か月前
株式会社東芝
ドア構造
1か月前
株式会社東芝
電子装置
今日
株式会社東芝
回路素子
1か月前
株式会社東芝
金型構造
6日前
株式会社東芝
回転電機
3か月前
株式会社東芝
吸音装置
1日前
株式会社東芝
判定装置
3か月前
株式会社東芝
配線治具
2か月前
株式会社東芝
搬送装置
3か月前
株式会社東芝
燃料電池
2か月前
株式会社東芝
遮断装置
3か月前
株式会社東芝
X線厚み計
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
電磁流量計
2か月前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
3日前
株式会社東芝
ラック装置
1か月前
株式会社東芝
半導体装置
15日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
粒子加速器
今日
株式会社東芝
電動送風機
1か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
主幹制御器
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ