TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145324
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045435
出願日
2024-03-21
発明の名称
物体検出装置、及び物体検出方法
出願人
株式会社国際電気
代理人
藤央弁理士法人
主分類
G06T
7/60 20170101AFI20250926BHJP(計算;計数)
要約
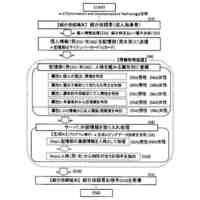
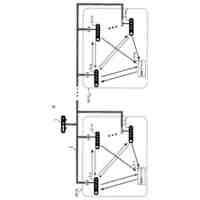
【課題】バウンディングボックスを出力できなかった予測も考慮した不確実度を算出する。
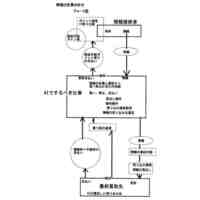
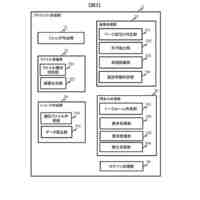
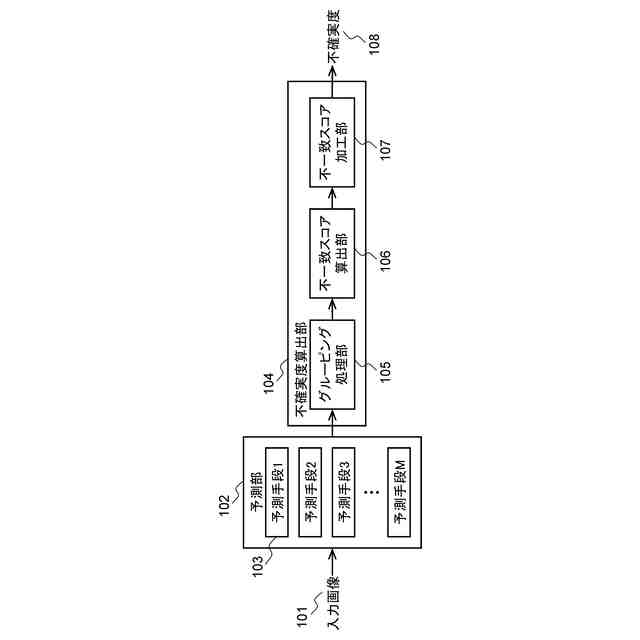
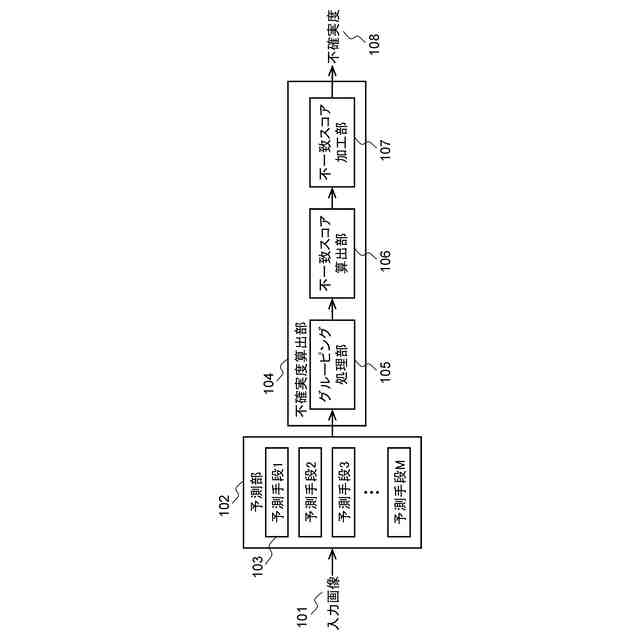
【解決手段】画像から物体を検出する物体検出装置であって、所定の演算処理を実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを有する計算機によって構成され、前記演算装置が、複数の予測手段を用いて検出された物体の物体情報を出力する予測部と、前記演算装置が、前記画像の予測物体数の最大値と、実際に出力された予測物体数とを用いて、前記予測手段間の判定結果の不一致度を示す不一致スコアを算出する不一致スコア算出部と、前記演算装置が、前記不一致スコアに基づいて予測の不確実度を算出する不一致スコア加工部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
画像から物体を検出する物体検出装置であって、
所定の演算処理を実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを有する計算機によって構成され、
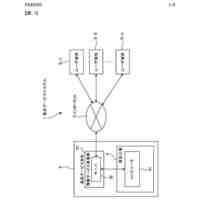
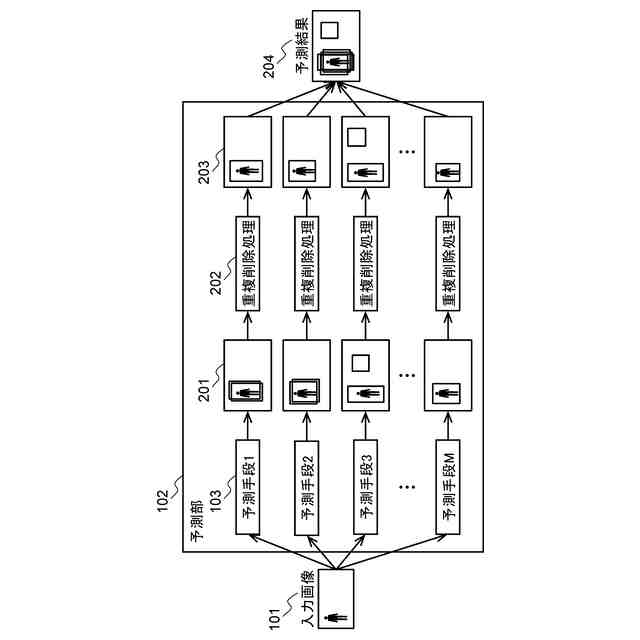
前記演算装置が、複数の予測手段を用いて検出された物体の物体情報を出力する予測部と、
前記演算装置が、前記画像の予測物体数の最大値と、実際に出力された予測物体数とを用いて、前記予測手段間の判定結果の不一致度を示す不一致スコアを算出する不一致スコア算出部と、
前記演算装置が、前記不一致スコアに基づいて予測の不確実度を算出する不一致スコア加工部とを備えることを特徴とする物体検出装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の物体検出装置であって、
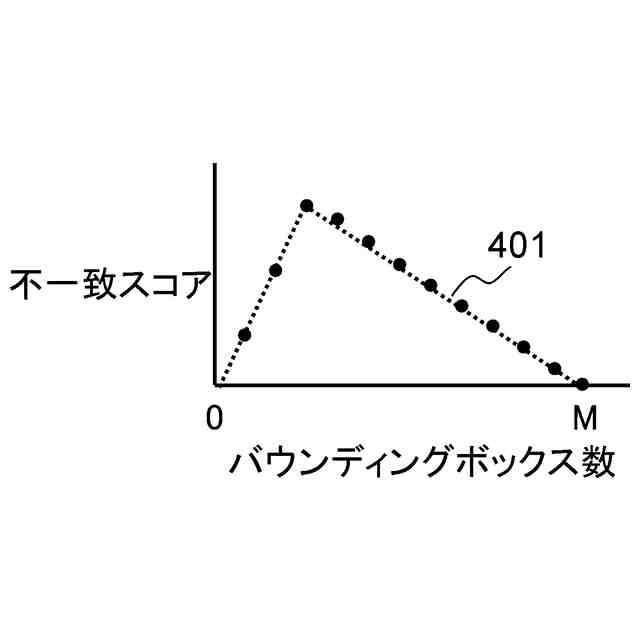
前記不一致スコア算出部は、前記予測物体数が0又は前記最大値であるときに最低値の不一致スコアを算出することを特徴とする物体検出装置。
【請求項3】
請求項1に記載の物体検出装置であって、
前記不一致スコア算出部は、前記画像に対する予測物体数が、前記予測物体数の最大値の2分の1であるときに最高値の不一致スコアを算出することを特徴とする物体検出装置。
【請求項4】
請求項1に記載の物体検出装置であって、
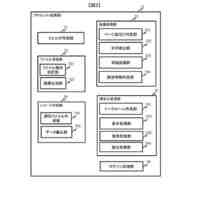
前記不一致スコア算出部は、出力された全ての予測物体数を用いて第1不一致スコアを算出し、前記物体情報に含まれるクラス情報ごとに出力された予測物体数を用いて第2不一致スコアを算出し、
前記不一致スコア加工部は、前記第1不一致スコアと前記第2不一致スコアを統合して前記不確実度を算出することを特徴とする物体検出装置。
【請求項5】
請求項4に記載の物体検出装置であって、
前記不一致スコア加工部は、前記第1不一致スコアと前記第2不一致スコアを加算して前記不確実度を算出することを特徴とする物体検出装置。
【請求項6】
請求項1に記載の物体検出装置であって、
前記不一致スコア算出部は、前記出力された物体情報をグループ分けし、前記グループ毎に不一致スコアを算出することを特徴とする物体検出装置。
【請求項7】
請求項6に記載の物体検出装置であって、
前記不一致スコア加工部は、前記グループ毎に算出された不一致スコアの平均値を、前記画像における予測の不確実度として算出することを特徴とする物体検出装置。
【請求項8】
請求項6に記載の物体検出装置であって、
前記不一致スコア加工部は、前記グループ毎に算出された不一致スコアの最大値を、前記画像における予測の不確実度として算出することを特徴とする物体検出装置。
【請求項9】
請求項1に記載の物体検出装置であって、
前記演算装置が、前記不確実度を監視する精度劣化検出部を備え、
前記精度劣化検出部は、前記不確実度と所定の閾値との比較結果に基づいて前記予測部の精度劣化を検出することを特徴とする物体検出装置。
【請求項10】
物体検出装置が画像から物体を検出する物体検出方法であって、
前記物体検出装置は、所定の演算処理を実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを有する計算機によって構成され、
前記物体検出方法は、
前記演算装置が、複数の予測手段を用いて検出された物体の物体情報を出力する予測手順と、
前記演算装置が、前記画像の予測物体数の最大値と、実際に出力された予測物体数とを用いて、前記予測手段間の判定結果の不一致度を示す不一致スコアを算出する不一致スコア算出手順と、
前記演算装置が、前記不一致スコアに基づいて予測の不確実度を算出する不一致スコア加工手順とを備えることを特徴とする物体検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体検出装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、機械学習を用いて構築されたAI(Artificial Intelligence)によって、静止画像や動画像から特定される物体の位置、サイズ、属性等の情報を活用するアプリケーションが普及しつつある。例えば、監視カメラ映像から立ち入り禁止領域に侵入する人物を自動的に検出したり、自動車の自動運転用に車載カメラ映像から障害物を検出するものが実用化されている。このようなAIは、事前に与えられた静止画像や動画像のデータを学習して得られる検出対象の特徴に基づいて予測するため、事前に与えられていない未知の物体に対して100%の予測精度を保証するものではない。そのため、AIの予測結果の不確実度(信頼度、確度とも称される)を定量化して、アプリケーションが要求する精度に応じた予測の補強、検証、棄却を実現する需要がある。
【0003】
本技術分野の背景技術として、以下の先行技術がある。特許文献1(特開2021-183429号公報)には、ターゲットドメインに属する画像から物体を検出するための検出ネットワークを生成する学習部を具備し、前記学習部は、前記ターゲットドメインに属する画像に基づく前記検出ネットワークの教師有り学習により、検出位置及びクラス識別に関する損失である検出タスク損失を計算する検出タスク損失計算部と、前記ターゲットドメインに属する画像及びソースドメインに属する画像に基づく前記検出ネットワークの敵対的学習により、前記ターゲットドメインと前記ソースドメインとの識別に関する損失であるドメイン識別損失を計算するドメイン識別損失計算部と、前記ターゲットドメインに属する画像に基づく前記検出ネットワークの自己学習により、前記自己学習によるクラス識別に関する損失である自己学習損失を計算する自己学習損失計算部と、前記ドメイン識別損失と、前記検出タスク損失及び/ 又は前記自己学習損失との重み付け加算に基づいて全体損失を計算する全体損失計算部と、前記全体損失を最小化するように前記検出ネットワークの学習パラメータを更新する更新部と、を有する、学習装置が開示されている。
【0004】
非特許文献1には、AIモデルの一部重みパラメータをランダムに0置換し繰り返し予測することで画像中の特定物体に対して複数のバウンディングボックス(検出対象を囲う矩形)を取得し、ボックス座標の分散に基づいて予測の不確実度を算出する例が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2023-069083号公報
【非特許文献】
【0006】
Deepshikha, Kumari, et al. "Monte carlo dropblock for modelling uncertainty in object detection." arXiv preprint arXiv:2108.03614 (2021).
【発明の概要】
【発明が解決しようとする課題】
【0007】
非特許文献1において、分散の大きさを予測のばらつきや不安定性と考えれば不確実度を定量化できるが、このアルゴリズムではバウンディングボックスを出力しない予測が考慮されず、不確実度から検出漏れの推定が困難である。
【0008】
また、特許文献1に開示される学習装置は、複数種類の画像変換を用いることで画像中の特定物体に対して複数のバウンディングボックスを取得し、それらボックス同士が重なる面積(IoU:Intersection over Union)に基づいて信頼性の低いバウンディングボックスを棄却するが、バウンディングボックスを出力しない予測が考慮されず、不確実度から検出漏れの推定が困難である。
【0009】
本発明は、バウンディングボックスを出力できなかった予測も考慮した不確実度の算出を目的とする。
【課題を解決するための手段】
【0010】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、画像から物体を検出する物体検出装置であって、所定の演算処理を実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを有する計算機によって構成され、前記演算装置が、複数の予測手段を用いて検出された物体の物体情報を出力する予測部と、前記演算装置が、前記画像の予測物体数の最大値と、実際に出力された予測物体数とを用いて、前記予測手段間の判定結果の不一致度を示す不一致スコアを算出する不一致スコア算出部と、前記演算装置が、前記不一致スコアに基づいて予測の不確実度を算出する不一致スコア加工部とを備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社国際電気
タスク管理システム
4日前
株式会社国際電気
監視システム及びその制御方法
4日前
株式会社国際電気
物体検出装置、及び物体検出方法
4日前
株式会社国際電気通信基礎技術研究所
基地局およびコンピュータに実行させるためのプログラム
4日前
株式会社国際電気通信基礎技術研究所
通信方式、通信システム、マスター基地局およびコンピュータに実行させるためのプログラム
4日前
個人
フラワーコートA
2か月前
個人
工程設計支援装置
1か月前
個人
地球保全システム
6日前
個人
為替ポイント伊達夢貯
1か月前
個人
冷凍食品輸出支援構造
1か月前
個人
介護情報提供システム
2か月前
個人
設計支援システム
2か月前
個人
携帯情報端末装置
1か月前
個人
設計支援システム
2か月前
個人
表変換編集支援システム
26日前
個人
結婚相手紹介支援システム
1か月前
個人
知財出願支援AIシステム
1か月前
個人
パスワード管理支援システム
26日前
個人
行動時間管理システム
28日前
株式会社カクシン
支援装置
2か月前
個人
AIによる情報の売買の仲介
1か月前
株式会社キーエンス
受発注システム
5日前
株式会社キーエンス
受発注システム
5日前
個人
海外支援型農作物活用システム
18日前
個人
システム及びプログラム
19日前
個人
食品レシピ生成システム
5日前
株式会社キーエンス
受発注システム
5日前
株式会社アジラ
進入判定装置
1か月前
個人
アンケート支援システム
2か月前
個人
パスポートレス入出国システム
1か月前
日本精機株式会社
施工管理システム
1か月前
個人
AIキャラクター制御システム
26日前
個人
人格進化型対話応答制御システム
26日前
個人
冷凍加工連携型農場運用システム
1か月前
個人
音声対話型帳票生成支援システム
26日前
個人
ジェスチャーパッドのガイド部材
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ