TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025146468
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024047272
出願日
2024-03-22
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
10/02 20060101AFI20250926BHJP(車両一般)
要約
【課題】自動運転走行時に、ロックアップクラッチの断接制御が最適に行われる車両の制御装置を提供する。
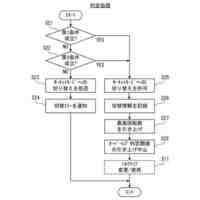
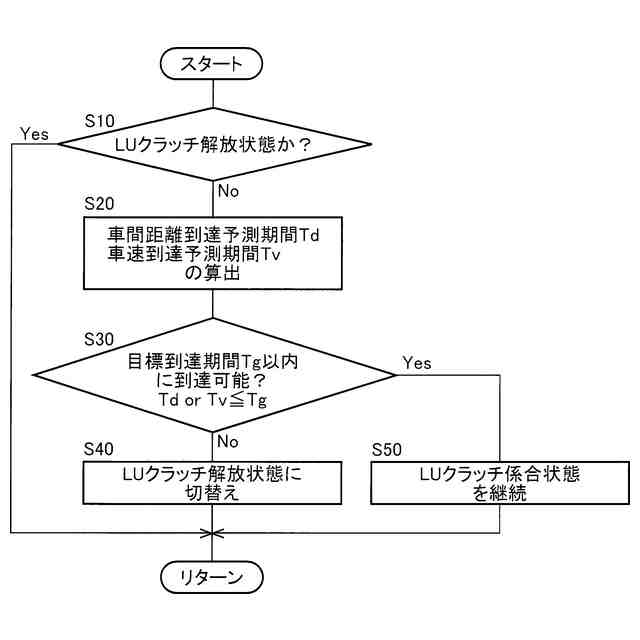
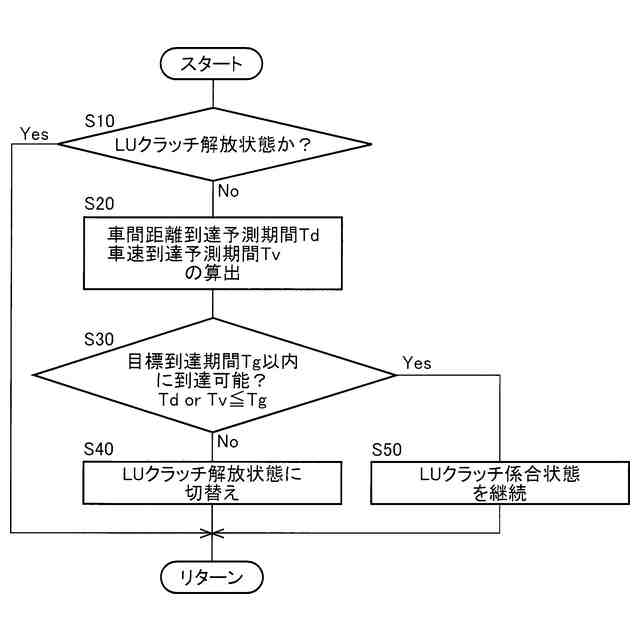
【解決手段】電子制御装置80は、自動運転走行の制御を行う自動運転制御部88と、自動運転走行中で、且つLUクラッチ36が係合状態の場合は、先行車両との車間距離Dまたは車速Vが、目標車間距離Dtまたは目標車速Vtに到達するまでにかかる車間距離到達予測期間Tdまたは車速到達予測期間Tvを算出する到達予測期間算出部94と、車間距離到達予測期間Tdまたは車速到達予測期間Tvが、予め設定された目標到達期間Tgより大の場合はLUクラッチ36を解放状態に切り替え、目標到達期間Tg以下の場合はLUクラッチ36の係合状態を継続する制御を行う第1断接制御部92と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
ロックアップクラッチ付のトルクコンバータを備える車両の、制御装置であって、
自動運転走行の制御を行う自動運転制御部と、
前記自動運転走行中で、且つ前記ロックアップクラッチが係合状態の場合は、先行車両との車間距離または車速が、目標車間距離または目標車速に到達するまでにかかる到達予測期間を算出する到達予測期間算出部と、
前記到達予測期間が、予め設定された目標到達期間より大の場合は前記ロックアップクラッチを解放状態に切り替え、前記目標到達期間以下の場合は前記ロックアップクラッチの係合状態を継続する制御を行う第1断接制御部と、を含む
ことを特徴とする車両の制御装置。
続きを表示(約 190 文字)
【請求項2】
前記自動運転走行中で、且つ前記ロックアップクラッチが解放状態の場合で、
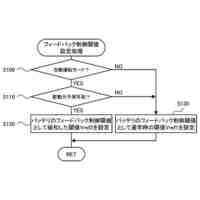
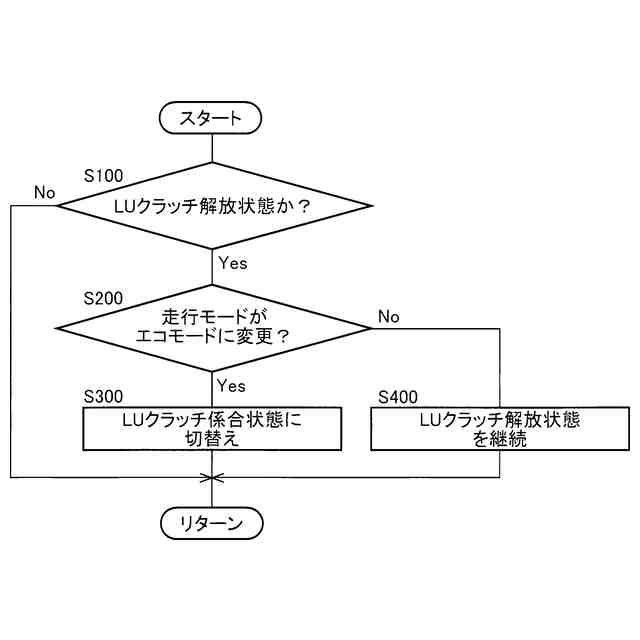
走行モードが、駆動力を減少させる設定に変更された場合は、前記ロックアップクラッチを係合状態に切り替え、駆動力を増大させる設定に変更された場合は、前記ロックアップクラッチの解放状態を継続する制御を行う第2断接制御部を更に含む
ことを特徴とする請求項1に記載の車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
ロックアップクラッチ付のトルクコンバータと、自動運転機能と、を備える車両の、制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ロックアップクラッチ付のトルクコンバータと、自動運転機能と、を備える車両において、ロックアップクラッチが係合状態で、且つ自動運転走行がされている場合の、車速変動を抑制する技術が開示されている。例えば、特許文献1に記載の車両用制御装置がそれである。
【先行技術文献】
【特許文献】
【0003】
特開2019-214247号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前記車両の自動運転においては、車速変動の抑制だけではなく、走路に応じた駆動力制御も行われる。例えば、地図データから道路の傾斜角度を取得し、これから走行する道路が登坂路ならば、傾斜角度に応じて駆動力を予め高める制御が行われる。このような場合で、ロックアップクラッチが係合状態で、駆動力が不足する場合は、ロックアップクラッチを解放状態へ切り替え、トルクコンバータのトルク増幅で、駆動力を増加させることが求められる。しかしながら、従来のロックアップクラッチの断接制御は、現時点のアクセル開度及び車速に基づいて行われるため、ロックアップクラッチの解放状態への切替えがすぐに行われず、その結果、駆動力増加に遅れが発生してしまう。つまり、ロックアップクラッチの断接制御が、自動運転に応じた最適な制御になっておらず、自動運転走行でのロックアップクラッチの断接制御に改良の余地があった。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、自動運転走行時に、ロックアップクラッチの断接制御が最適に行われる車両の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の要旨とするところは、(a)ロックアップクラッチ付のトルクコンバータを備える車両の、制御装置であって、(b)自動運転走行の制御を行う自動運転制御部と、前記自動運転走行中で、且つ前記ロックアップクラッチが係合状態の場合は、先行車両との車間距離または車速が、目標車間距離または目標車速に到達するまでにかかる到達予測期間を算出する到達予測期間算出部と、前記到達予測期間が、予め設定された目標到達期間より大の場合は前記ロックアップクラッチを解放状態に切り替え、前記目標到達期間以下の場合は前記ロックアップクラッチの係合状態を継続する制御を行う第1断接制御部と、を含むことにある。
【発明の効果】
【0007】
本発明の車両の制御装置は、自動運転走行の制御を行う自動運転制御部と、前記自動運転走行中で、且つ前記ロックアップクラッチが係合状態の場合は、先行車両との車間距離または車速が、目標車間距離または目標車速に到達するまでにかかる到達予測期間を算出する到達予測期間算出部と、前記到達予測期間が、予め設定された目標到達期間より大の場合は前記ロックアップクラッチを解放状態に切り替え、前記目標到達期間以下の場合は前記ロックアップクラッチの係合状態を継続する制御を行う第1断接制御部と、を含む。これにより、前記目標到達期間以内に、前記目標車間距離または前記目標車速に到達できないと予測される場合は、前記ロックアップクラッチが解放状態に切り替えられるので、前記トルクコンバータのトルク増幅作用で駆動力が増加され、到達期間の短縮が図られる。したがって、自動運転走行時に、前記ロックアップクラッチの断接制御が最適に行われる。
【図面の簡単な説明】
【0008】
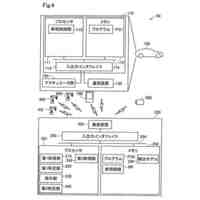
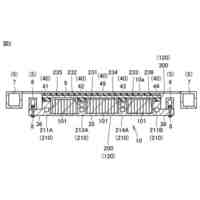
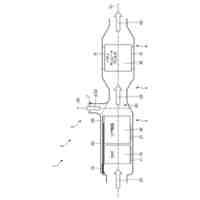
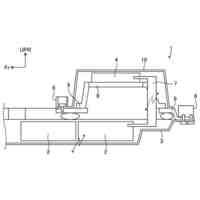
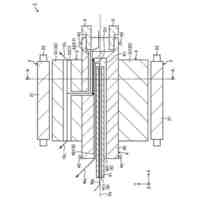
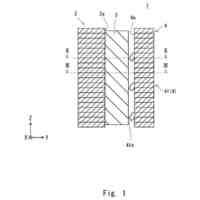
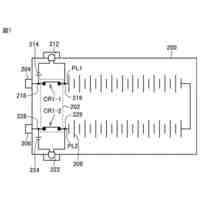
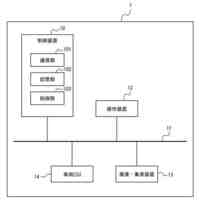
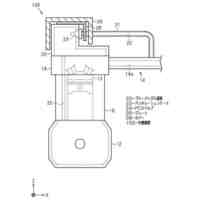
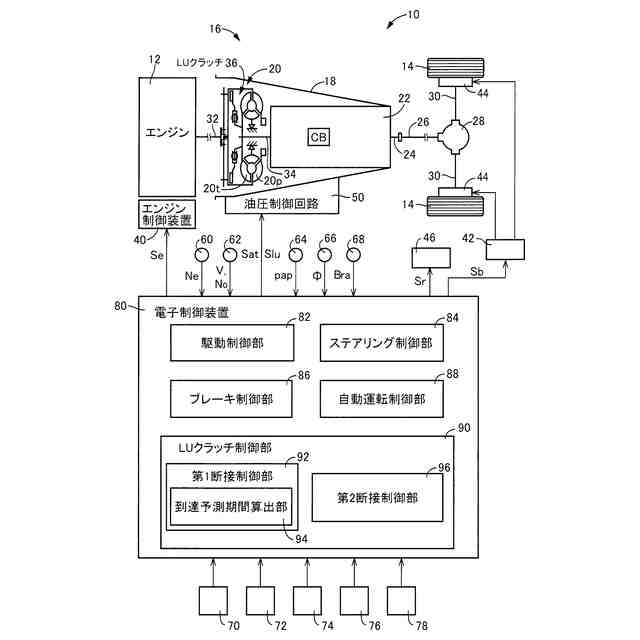
本発明が適用された車両の概略構成を説明する図であると共に、車両における各種制御のための制御機能および制御系の要部を説明する図である。
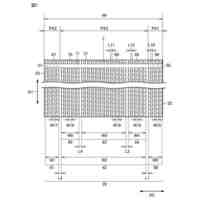
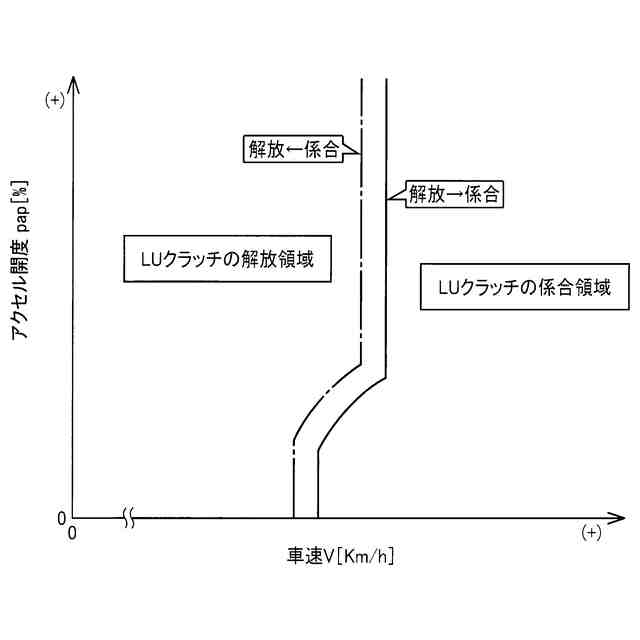
ロックアップクラッチの断接条件として予め定められた、ロックアップ切替マップの一例である。
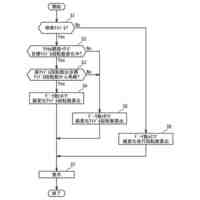
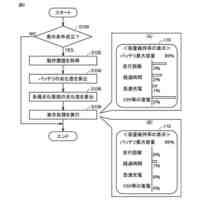
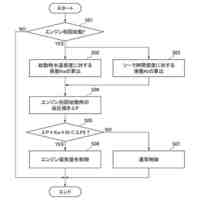
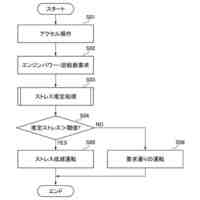
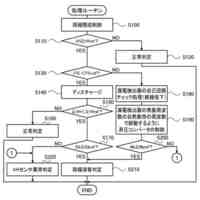
図1に示す電子制御装置の、自動運転走行中のロックアップクラッチの断接制御の制御作動を説明するフローチャートの一例である。
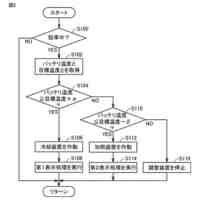
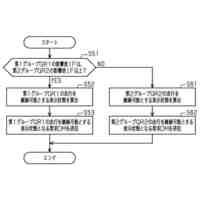
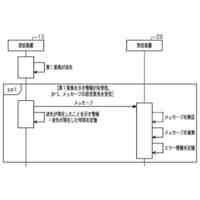
図1に示す電子制御装置の、自動運転走行中に走行モードが変更された場合のロックアップクラッチの断接制御の制御作動を説明するフローチャートの一例である。
【発明を実施するための形態】
【0009】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。なお、実施例において図は適宜簡略化或いは変形されており、各部の寸法比及び形状等は必ずしも正確に描かれていない。
【実施例】
【0010】
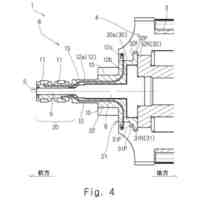
図1は、本発明が適用される車両10の概略構成を説明すると共に、車両10における各種制御の為の制御機能の要部を説明する図である。図1において、車両10は、動力源としてのエンジン12と、車輪14と、エンジン12と車輪14との間の動力伝達経路に設けられた動力伝達装置16と、を備えている。動力伝達装置16は、ケース18内に、トルクコンバータ20、自動変速機22等を備えている。又、動力伝達装置16は、自動変速機22の出力回転部材である変速機出力軸24に連結されたプロペラシャフト26、プロペラシャフト26に連結されたデフ28、デフ28に連結された左右のドライブシャフト30等を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
装置
24日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
装置
24日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
電解液
今日
トヨタ自動車株式会社
回転子
15日前
トヨタ自動車株式会社
サーバ
8日前
トヨタ自動車株式会社
電動車
14日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
回転子
今日
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
加熱装置
14日前
トヨタ自動車株式会社
電源装置
1か月前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
通信装置
1か月前
トヨタ自動車株式会社
育苗装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
内燃機関
14日前
トヨタ自動車株式会社
駆動装置
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ