TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131300
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028962
出願日
2024-02-28
発明の名称
ロボットシステム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
G05D
1/667 20240101AFI20250902BHJP(制御;調整)
要約
【課題】ワークの向きを、正確に基準向きにする。
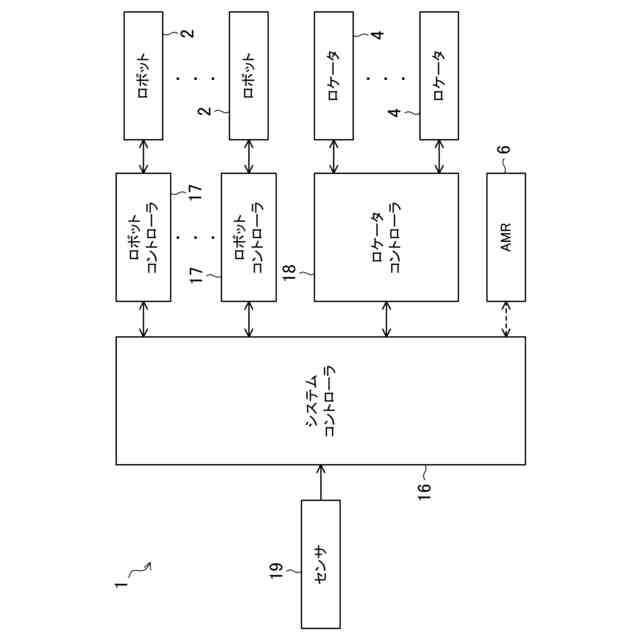
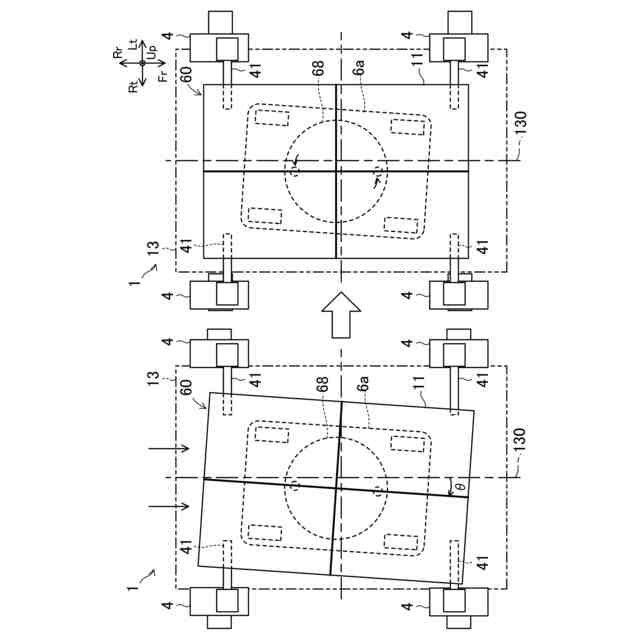
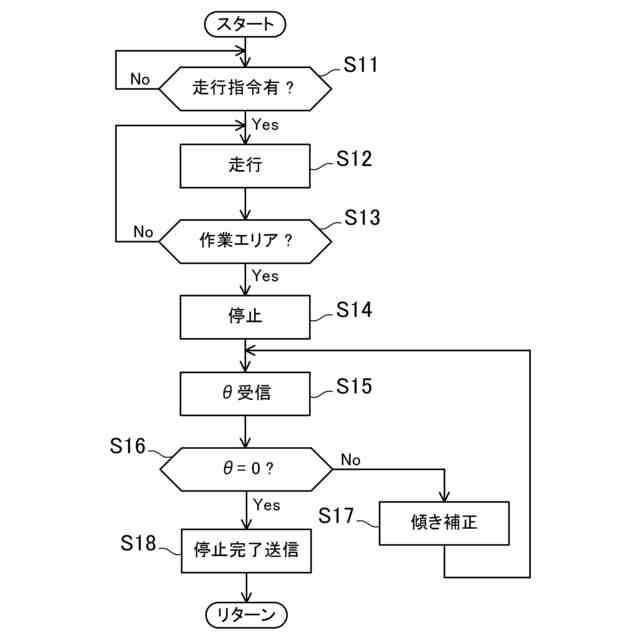
【解決手段】ロボットシステム1は、作業エリア13に搬送されたワーク(ボデー11)に対して作業を行うロボット2と、ワークの基準向き130に対する傾きであって、作業エリアに到着したワークの傾きに関係した信号を出力するセンサ19と、作業エリアへワークを搬送し、かつ作業エリアにおいて、ワークが基準向きとなるよう、センサの信号に基づきワークの傾きを補正する搬送車(AMR6)と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
作業エリアに搬送されたワークに対して作業を行うロボットと、
前記ロボットが前記ワークに作業を行う際の前記ワークの基準向きに対する傾きであって、前記作業エリアに到着した前記ワークの前記傾きに関係した信号を出力するセンサと、
前記作業エリアへ前記ワークを搬送し、かつ前記作業エリアにおいて、前記ワークが前記基準向きとなるよう、前記センサの信号に基づき前記ワークの傾きを補正する搬送車と、
を備える、ロボットシステム。
続きを表示(約 720 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
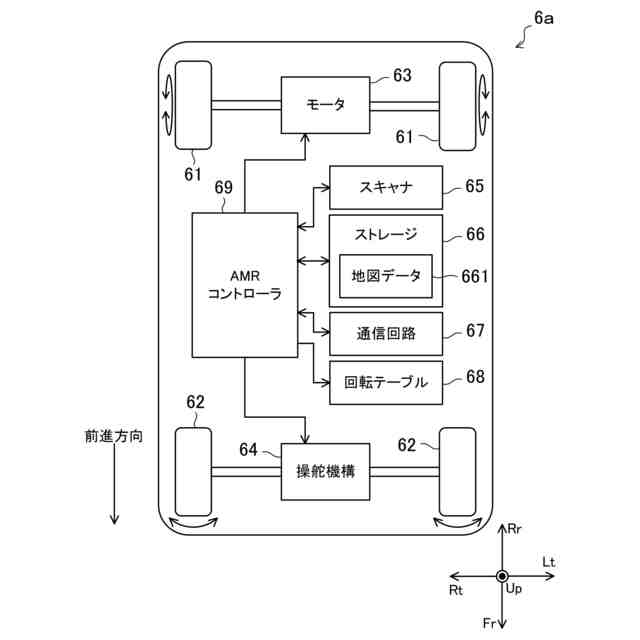
前記搬送車は、前記ワークを鉛直軸回りに回転させる回転テーブルを有し、
前記回転テーブルは、前記搬送車が前記作業エリアにおいて停止した後に前記ワークを回転させることにより、前記ワークの傾きを補正する、ロボットシステム。
【請求項3】
請求項1に記載のロボットシステムにおいて、
前記搬送車は、鉛直軸回りに旋回し、
前記搬送車は、前記作業エリアにおいて停止した後に旋回することにより、前記ワークの傾きを補正する、ロボットシステム。
【請求項4】
請求項1乃至3のいずれか1項に記載のロボットシステムにおいて、
前記作業エリアにおいて、前記ワークと前記搬送車とを含む移動体の、進行方向の前部と干渉するストッパをさらに備え、
前記搬送車は、前記移動体が前記ストッパに当たった状態で停止すると共に、停止した後に前記ワークの傾きを補正する、ロボットシステム。
【請求項5】
請求項1に記載のロボットシステムにおいて、
前記搬送車は、自律走行搬送ロボットである、ロボットシステム。
【請求項6】
請求項1に記載のロボットシステムにおいて、
前記作業エリアに位置し、かつ前記搬送車から引き渡された前記ワークを、前記ロボットの作業中に支持するロケータをさらに備える、ロボットシステム。
【請求項7】
請求項1に記載のロボットシステムにおいて、
前記センサは、前記作業エリアに位置する前記ワークを撮影するカメラである、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボットシステムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、従来のロボットシステムが記載されている。従来のロボットシステムは、自動車の車体の組み立てラインに採用されている。組み立てラインでは、アンダーボデーにサイドメンバが組み付けられる。従来のロボットシステムは、第1の多軸ロボットと、第2の多軸ロボットと、を備えている。第1の多軸ロボットは、アンダーボデーを位置決めする。第2の多軸ロボットは、アンダーボデーとサイドメンバとを溶接する。従来のロボットシステムは、アンダーボデーを組み付けエリアに搬入するAGV(Automatic Guided Vehicle)をさらに備えている。AGVは、床面上の磁気テープに沿って走行する。
【先行技術文献】
【特許文献】
【0003】
特許第6887738号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットがワークに対して作業を行う作業エリアにおいては、ワークの基準向きが定められる。ワークの基準向きは、ロボットがワークに対して作業を行う際の、ワークの向きであって、水平面内における向きである。ワークの基準向きは、通常は、ワークが作業エリアへ搬送される際の、搬送方向に沿う向きである。
【0005】
自動車の製造ラインに適用されるロボットシステムには、ワークの向きを精度良く調整することが求められる。自動車の車体のような長尺のワークでは、僅かな向きのズレが、ワークの端では大きな位置のズレを招くためである。
【0006】
前記従来のロボットシステムにおいて、作業エリアへ到着したワークは、基準向きに対して傾いている場合がある。AGVがワークを作業エリアへ搬送するためである。従来のロボットシステムの作業エリアには、一対のガイドローラと、位置決め装置とが設置されている。一対のガイドローラは、AGVの車幅方向の位置決めを行い、位置決め装置は、AGVの前後方向の位置決めを行う。一対のガイドローラと位置決め装置との組み合わせは、ワークの向きを、正確に基準向きにすることができない。
【課題を解決するための手段】
【0007】
ここに開示する技術は、ロボットシステムに関する。ロボットシステムは、
作業エリアに搬送されたワークに対して作業を行うロボットと、
前記ロボットが前記ワークに作業を行う際の前記ワークの基準向きに対する傾きであって、前記作業エリアに到着した前記ワークの前記傾きに関係した信号を出力するセンサと、
前記作業エリアへ前記ワークを搬送し、かつ前記作業エリアにおいて、前記ワークが前記基準向きとなるよう、前記センサの信号に基づき前記ワークの傾きを補正する搬送車と、
を備える。
【発明の効果】
【0008】
作業エリアへワークを搬送する搬送車がワークの傾きを補正するため、ロボットシステムは、ワークの向きを正確に基準向きにできる。
【図面の簡単な説明】
【0009】
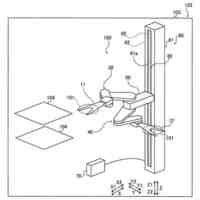
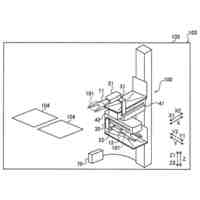
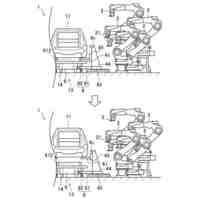
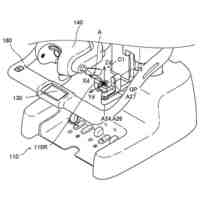
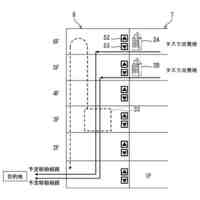
図1は、自動車の製造ラインに適用されたロボットシステムを示している。
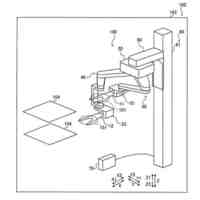
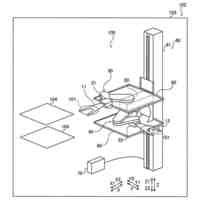
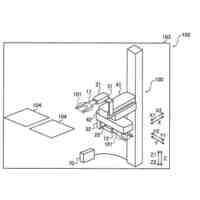
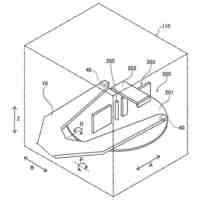
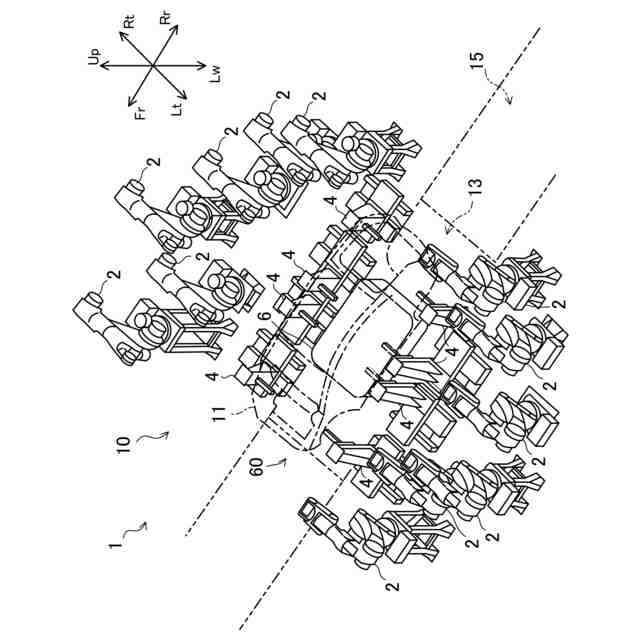
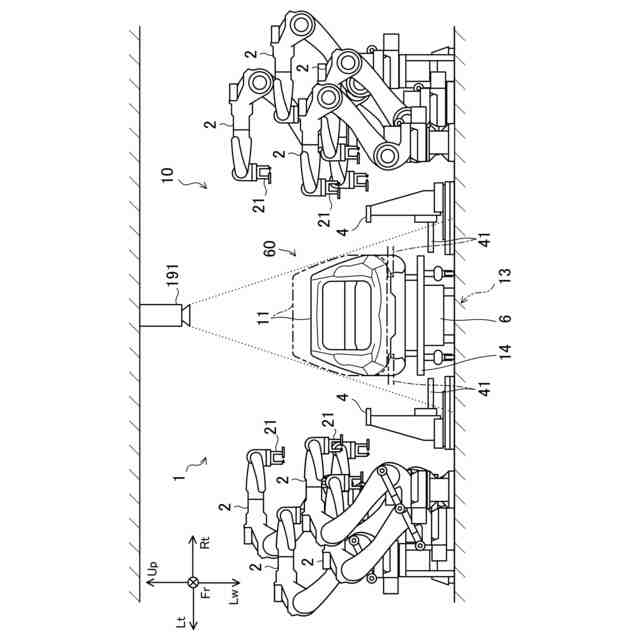
図2は、ロボットシステムを示している。
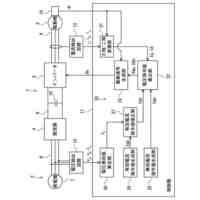
図3は、ロボットシステムのブロック図である。
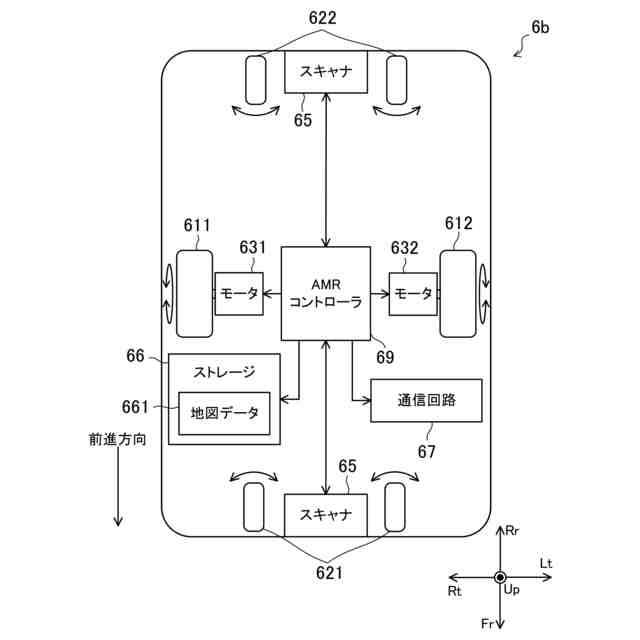
図4は、自律走行搬送ロボット(Autonomous Mobile Robot:AMR)のブロック図である。
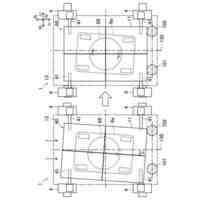
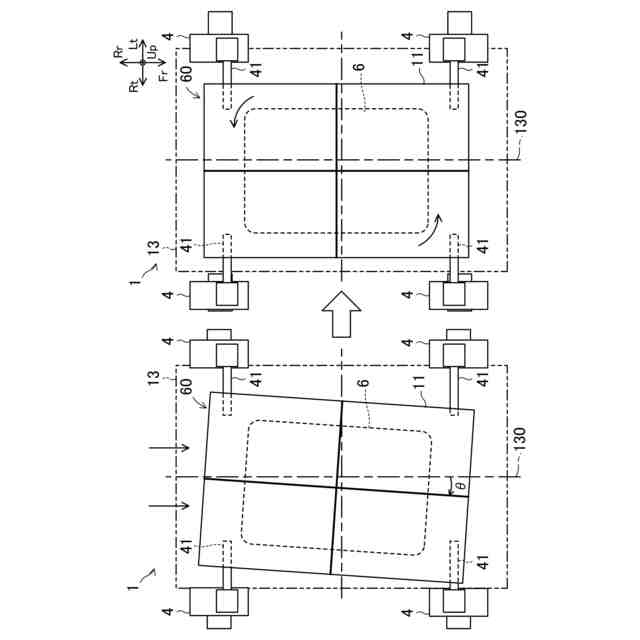
図5は、回転テーブルを有するAMRによるワークの傾き補正の手順を示している。
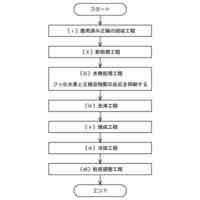
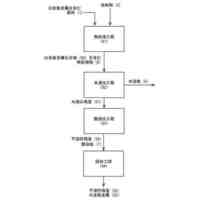
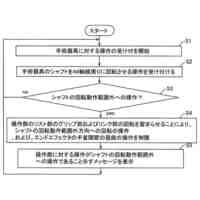
図6は、AMRの制御手順を示すフローチャートである。
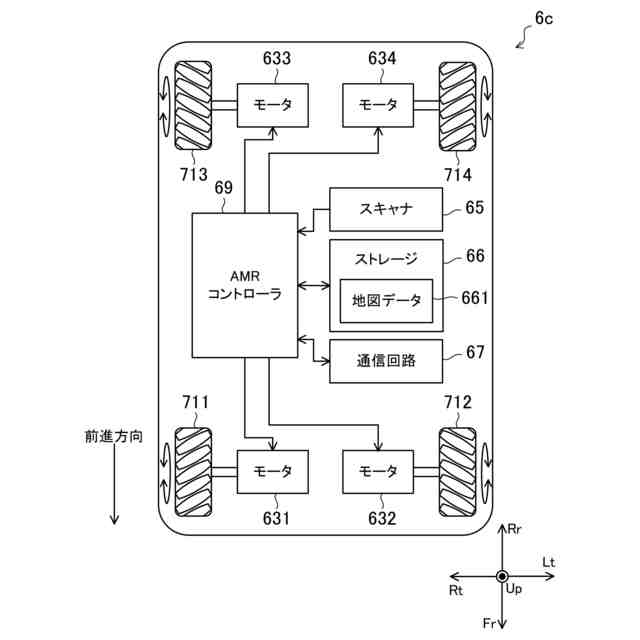
図7は、AMRの変形例を示している。
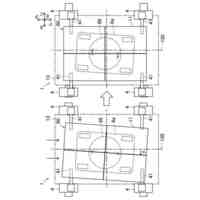
図8は、その場で回転できるAMRによるワークの傾き補正の手順を示している。
図9は、AMRの別の変形例を示している。
図10は、AMRのさらに別の変形例を示している。
図11は、AMRの経路に設置されたストッパを示している。
図12は、ストッパを利用したAMRによるワークの傾き補正の手順を示している。
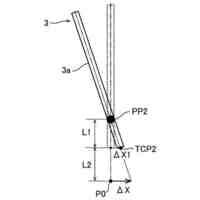
図13は、ストッパを利用したAMRによるワークの傾き補正の手順を示している。
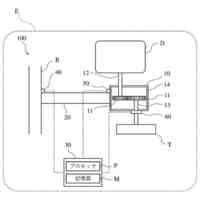
図14は、センサの変形例を示している。
【発明を実施するための形態】
【0010】
以下、ロボットシステムの実施形態について、図面を参照しながら説明する。ここで説明するロボットシステムは例示である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
11日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
15日前
川崎重工業株式会社
位置情報システム
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
クローズドインペラ
3日前
川崎重工業株式会社
正極活物質の再生方法
4日前
川崎重工業株式会社
液化ガス導入システム
11日前
川崎重工業株式会社
電池セル及びその分解方法
25日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
3日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
1か月前
川崎重工業株式会社
電力供給システムおよびその制御方法
10日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
10日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
3日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
2日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
7日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
多重殻タンク
21日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
16日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ