TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131435
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024029190
出願日
2024-02-28
発明の名称
基板搬送ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250902BHJP(基本的電気素子)
要約
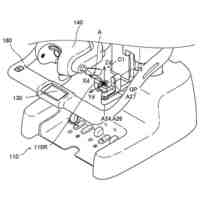
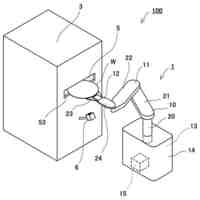
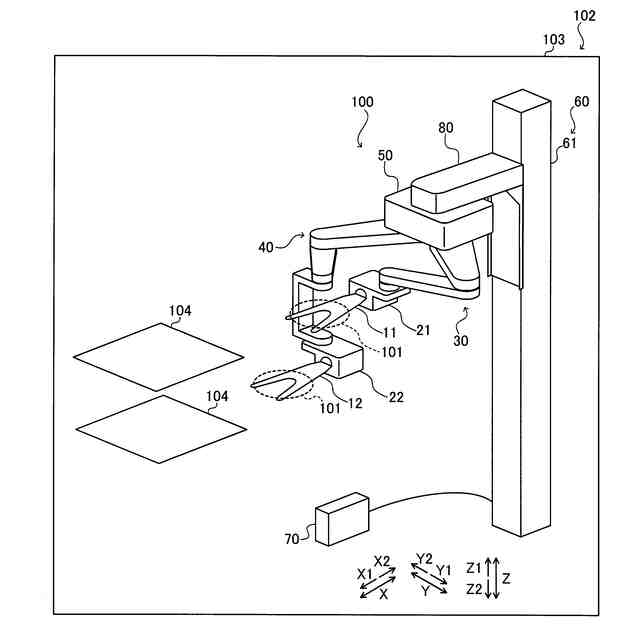
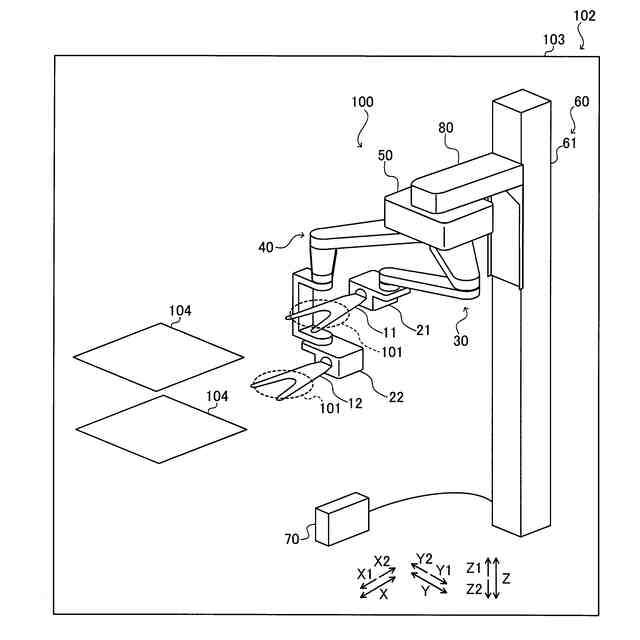
【課題】第1ハンドと第2ハンドとの両方によって、上下方向において共通してアクセスできる領域の大型化が可能な基板搬送ロボットを提供する。
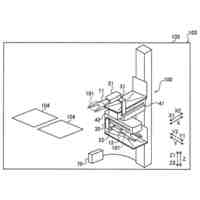
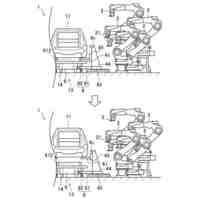
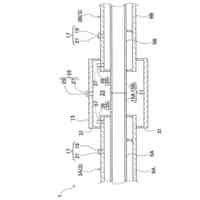
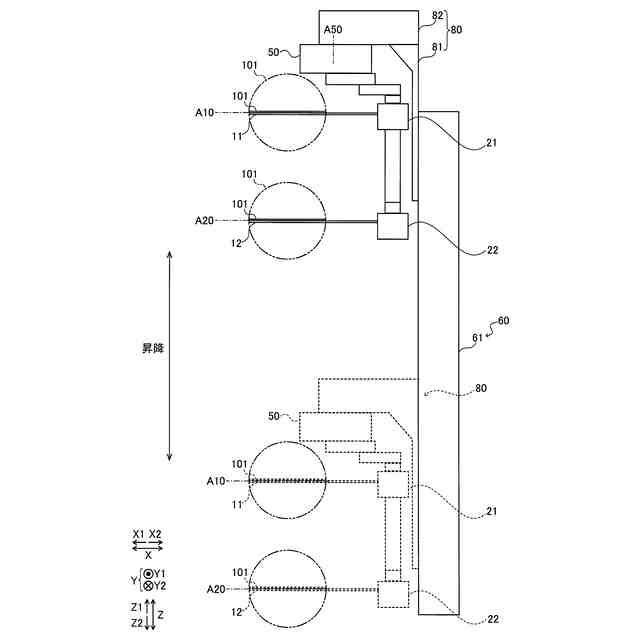
【解決手段】この基板搬送ロボット100は、各々が基板101を保持するハンド11およびハンド12と、ハンド11を水平方向に沿って移動させる水平多関節のアーム30と、アーム30とは別個に配置され、ハンド12を水平方向に沿って移動させる水平多関節のアーム40と、アーム30およびアーム40を下方に吊り下げて支持するアーム吊り下げ部50と、アーム吊り下げ部50を昇降移動させることによって、ハンド11およびハンド12を昇降移動させる昇降部60と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
各々が基板を保持する第1ハンドおよび第2ハンドと、
前記第1ハンドを水平方向に沿って移動させる水平多関節の第1アームと、
前記第1アームとは別個に配置され、前記第2ハンドを水平方向に沿って移動させる水平多関節の第2アームと、
前記第1アームおよび前記第2アームを下方に吊り下げて支持するアーム吊り下げ部と、
前記アーム吊り下げ部を昇降移動させることによって、前記第1ハンドおよび前記第2ハンドを昇降移動させる昇降部と、を備える、基板搬送ロボット。
続きを表示(約 1,400 文字)
【請求項2】
前記第1アームは、前記アーム吊り下げ部の下方において、水平面内の左右方向の一方に配置されており、
前記第2アームは、前記アーム吊り下げ部の下方において、水平面内の左右方向の他方に前記第1アームと並んで配置されている、請求項1に記載の基板搬送ロボット。
【請求項3】
前記第2アームの先端に配置され、前記第2ハンドを前記第1ハンドよりも下方において支持する支持部をさらに備え、
前記第1ハンドおよび前記第2ハンドは、互いに上下方向に離間した状態で配置されている、請求項2に記載の基板搬送ロボット。
【請求項4】
前記支持部は、
前記第2アームの先端から左右方向の他方に沿って延びる第1水平部分と、
前記第1水平部分の左右方向の他方の端部から下方に延びる上下部分と、
平面視において前記第1水平部分と重畳して配置され、前記上下部分から左右方向の一方に沿って延びる第2水平部分と、を含み、
前記第1水平部分と前記上下部分と前記第2水平部分とによるU字形状を有する、請求項3に記載の基板搬送ロボット。
【請求項5】
前記第1水平部分は、前記第1ハンドに保持される前記基板の位置よりも大きい分だけ、左右方向の他方に沿って延びており、
前記上下部分は、前記第1ハンドに保持された前記基板から左右方向の他方に離間した位置において、前記第1水平部分から下方に延びている、請求項4に記載の基板搬送ロボット。
【請求項6】
前記第1ハンドの基端に接続され、前記第1ハンドを、水平方向に沿って延びる回転軸線回りに回転させる第1ハンド回転部と、
前記第2ハンドの基端に接続され、前記第2ハンドを、水平方向に沿って延びる回転軸線回りに回転させる第2ハンド回転部とを、さらに備える、請求項1に記載の基板搬送ロボット。
【請求項7】
前記第1アームおよび前記第2アームの動作を制御する制御部をさらに備え、
前記制御部は、
平面視において、前記第1ハンドが前記アーム吊り下げ部と重畳した位置に配置された状態で、前記第1ハンド回転部により前記第1ハンドを水平方向に沿って延びる回転軸線回りに回転させ、
平面視において、前記第2ハンドが前記アーム吊り下げ部と重畳した位置に配置された状態で前記第2ハンド回転部により前記第2ハンドを水平方向に沿って延びる回転軸線回りに回転させる、請求項6に記載の基板搬送ロボット。
【請求項8】
前記制御部は、平面視において、前記第1ハンドおよび前記第2ハンドが互いに重畳した位置に配置された状態で、前記第1ハンドおよび前記第2ハンドの各々を水平方向に沿って延びる回転軸線回りに回転させる、請求項7に記載の基板搬送ロボット。
【請求項9】
前記昇降部に接続され、前記昇降部により昇降移動する移動フレーム部をさらに備え、
前記アーム吊り下げ部は、前記移動フレーム部に接続されている、請求項1に記載の基板搬送ロボット。
【請求項10】
前記アーム吊り下げ部は、前記移動フレーム部に対して水平面内において回転する、請求項9に記載の基板搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、基板搬送ロボットが開示されている。特許文献1には、基板を搬送するロボットが開示されている。このロボットは、基板としてのウエハが搭載される第1ハンドおよび第2ハンドを備えている。第1ハンドは、第1アームの先端に連結されている。第2ハンドは、第2アームの先端に連結されている。第1アームは、アーム支持部の上面側に取り付けられており、アーム支持部に対して上下方向を回転軸として回転する。第2アームは、アーム支持部の下面側に取り付けられており、アーム支持部に対して上下方向を回転軸として回転する。また、アーム支持部は、柱部により上下方向に移動可能に保持されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-33737号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されたロボットのように、上下方向を回転軸として回転する第1アームおよび第2アームを、それぞれ、アーム支持部の上面側および下面側に配置する場合には、上下方向において第1アームと第2アームとの間にアーム支持部が配置されていることに起因して、アーム支持部の上面側に配置されている第1アームは、アーム支持部が配置されている位置よりも低い位置に移動することができない。そのため、アーム支持部を上下方向に移動させた場合にも、上面側の第1アームに接続されている第1ハンドが、アーム支持部が配置されている位置よりも低い位置にアクセスすることができないので、第1アームに接続された第1ハンドと第2アームに接続された第2ハンドとによって、共通してアクセスできる領域が制限される。そこで、第1ハンドと第2ハンドとの両方によって、上下方向において共通してアクセスできる領域の大型化が望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、第1ハンドと第2ハンドとの両方によって、上下方向において共通してアクセスできる領域の大型化が可能な基板搬送ロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面による基板搬送ロボットは、各々が基板を保持する第1ハンドおよび第2ハンドと、第1ハンドを水平方向に沿って移動させる水平多関節の第1アームと、第1アームとは別個に配置され、第2ハンドを水平方向に沿って移動させる水平多関節の第2アームと、第1アームおよび第2アームを下方に吊り下げて支持するアーム吊り下げ部と、アーム吊り下げ部を昇降移動させることによって、第1ハンドおよび第2ハンドを昇降移動させる昇降部と、を備える。
【0007】
この開示の一の局面による基板搬送ロボットは、上記のように、第1アームおよび第2アームを下方に吊り下げて支持するアーム吊り下げ部を備える。これにより、第1ハンドを移動させる第1アームと、第2ハンドを移動させる第2アームとの両方が、アーム吊り下げ部の下方に吊り下げられて支持されているため、上下方向において第1アームと第2アームとの間にアーム支持部が配置されている場合に比べて、第1ハンドと第2ハンドとをより下方の位置に共通してアクセスさせることができる。また、第1アームと第2アームとの両方がアーム吊り下げ部の下方に吊り下げられて支持されているため、上下方向において第1アームと第2アームとの間にアーム支持部が配置されている場合に比べて、第1アームにより移動する第1ハンドと第2アームにより移動する第2ハンドとを、上下方向においてより近づけて配置できる。これらの結果、第1ハンドと第2ハンドとの両方によって、上下方向において共通してアクセスできる領域を大型化できる。
【発明の効果】
【0008】
本開示によれば、第1ハンドと第2ハンドとの両方によって、上下方向において共通してアクセスできる領域を大型化できる。
【図面の簡単な説明】
【0009】
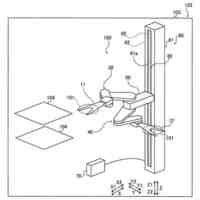
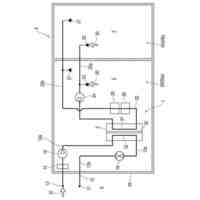
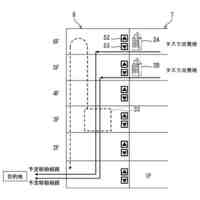
本開示の一実施形態による基板搬送ロボットを備える基板処理システムの構成を示した模式図である。
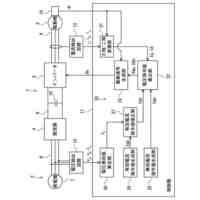
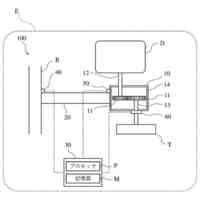
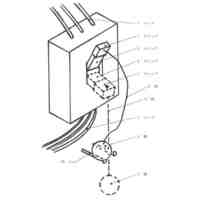
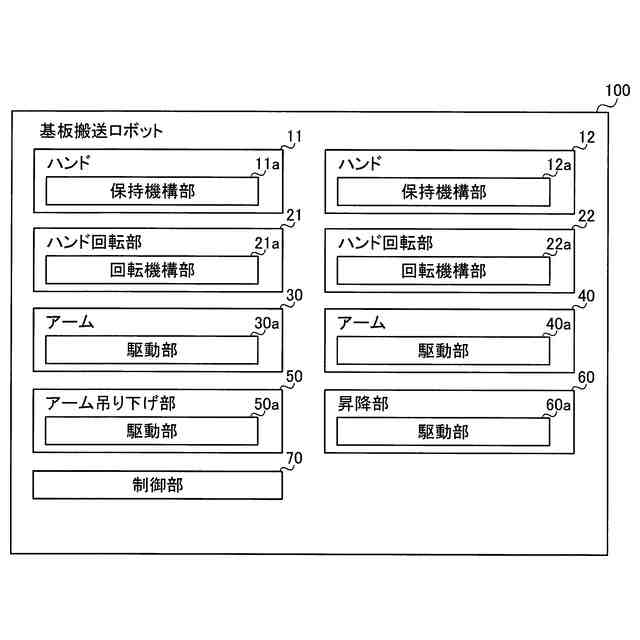
基板搬送ロボットの制御的な構成を示したブロック図である。
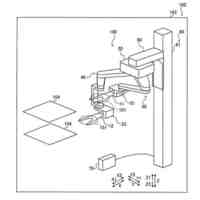
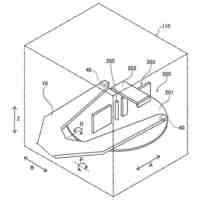
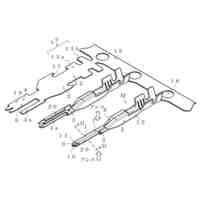
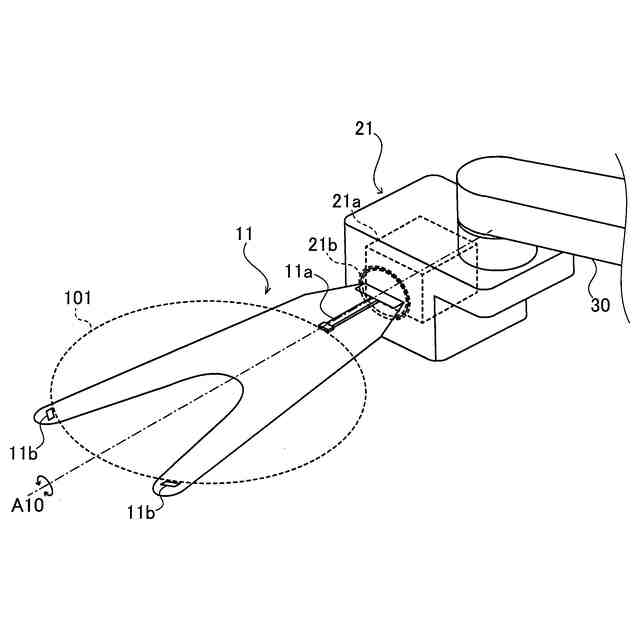
基板搬送ロボットにおけるハンドの構成を説明するための斜視図である。
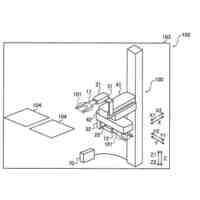
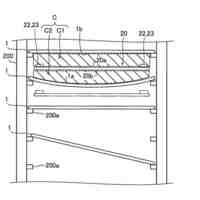
昇降部による昇降移動を示した側面図である。
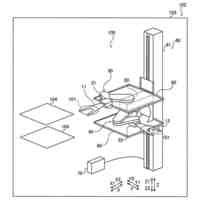
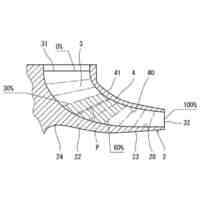
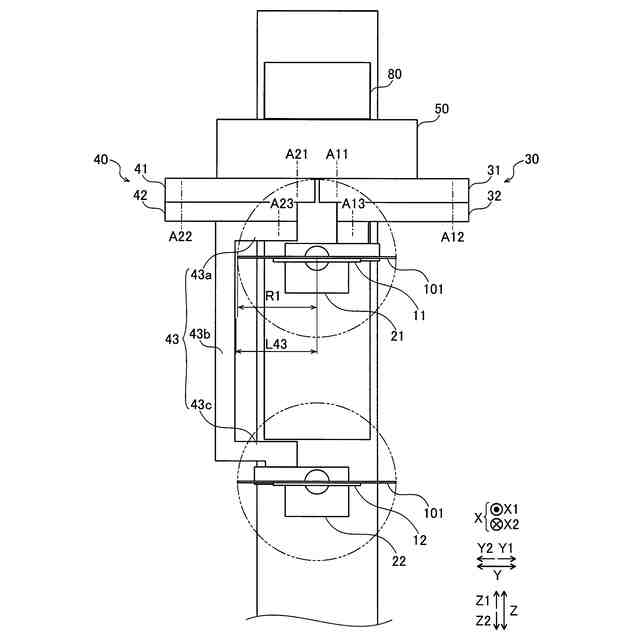
アームの構成を説明するための正面図である。
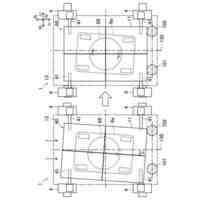
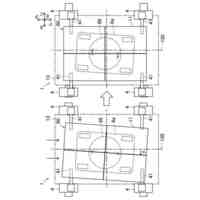
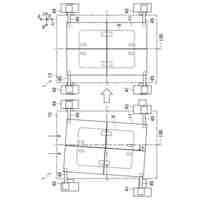
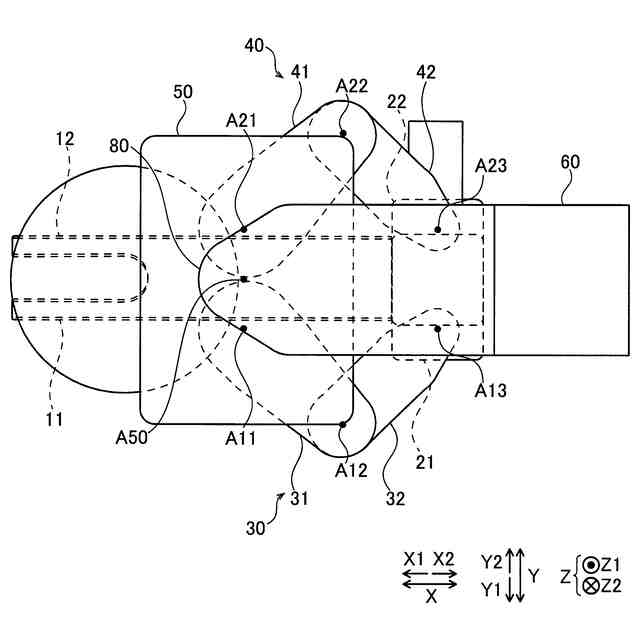
昇降動作、および、ハンドの回転の動作を行う場合におけるハンドの配置を説明するための平面図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
10日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
14日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
位置情報システム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
クローズドインペラ
2日前
川崎重工業株式会社
正極活物質の再生方法
3日前
川崎重工業株式会社
液化ガス導入システム
10日前
川崎重工業株式会社
電池セル及びその分解方法
24日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
2日前
川崎重工業株式会社
電力供給システムおよびその制御方法
9日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
9日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
2日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
1日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
6日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
多重殻タンク
20日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
15日前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
14日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
1か月前
中国電力株式会社
ポート検出器、ポート異常検出システム、ポート検出器の製造方法及びポート異常検出方法
22日前
個人
雄端子
1か月前
個人
後付地震遮断機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ