TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131432
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024029177
出願日
2024-02-28
発明の名称
基板搬送ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250902BHJP(基本的電気素子)
要約
【課題】基板搬送ロボットの占める空間の領域の大型化を抑制しながら、ハンドの動作範囲を大きくすることが可能な基板搬送ロボットを提供する。
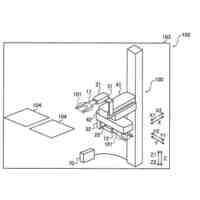
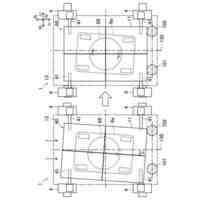
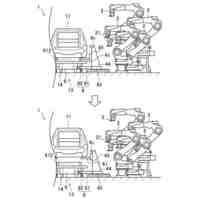
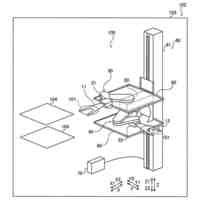
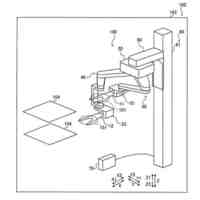
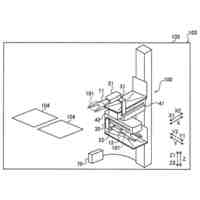
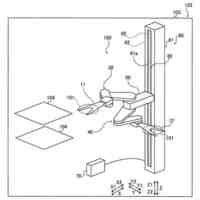
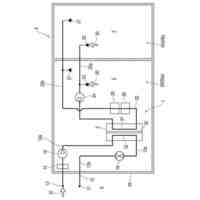
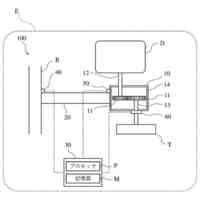
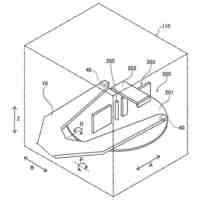
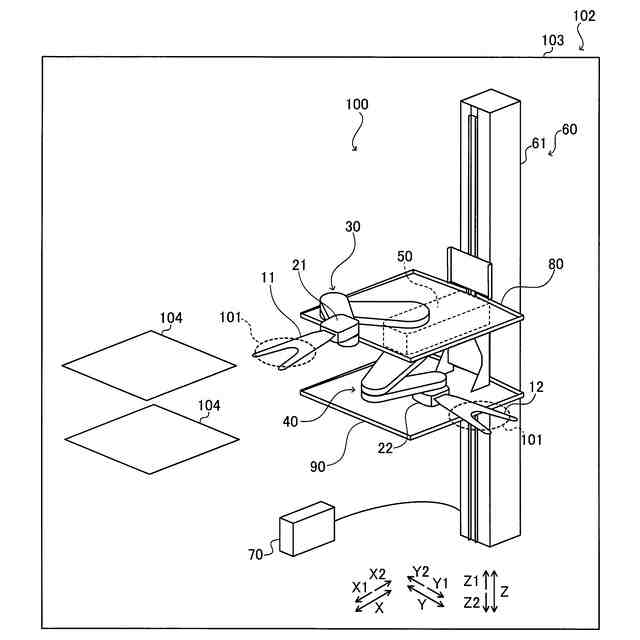
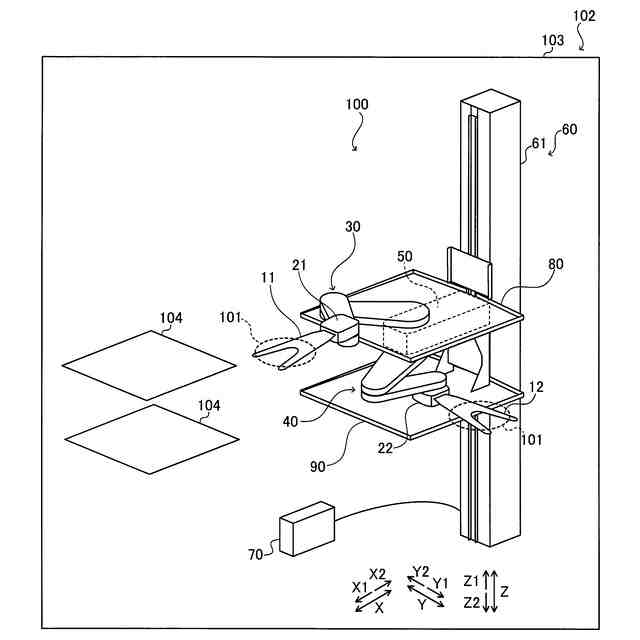
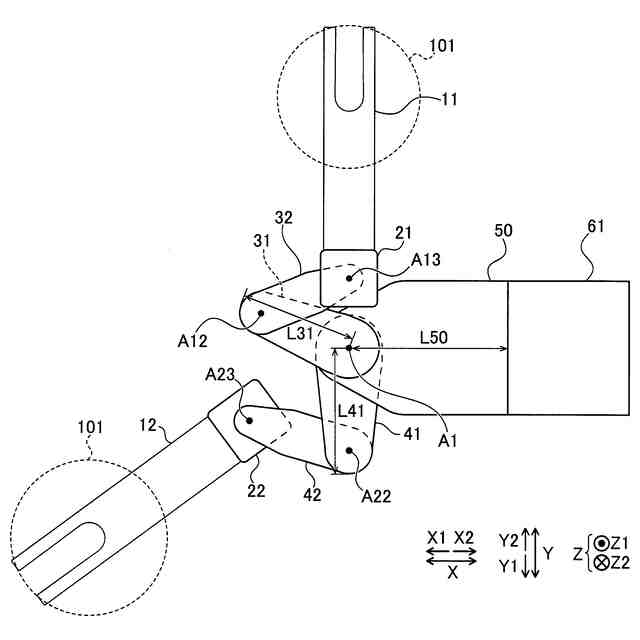
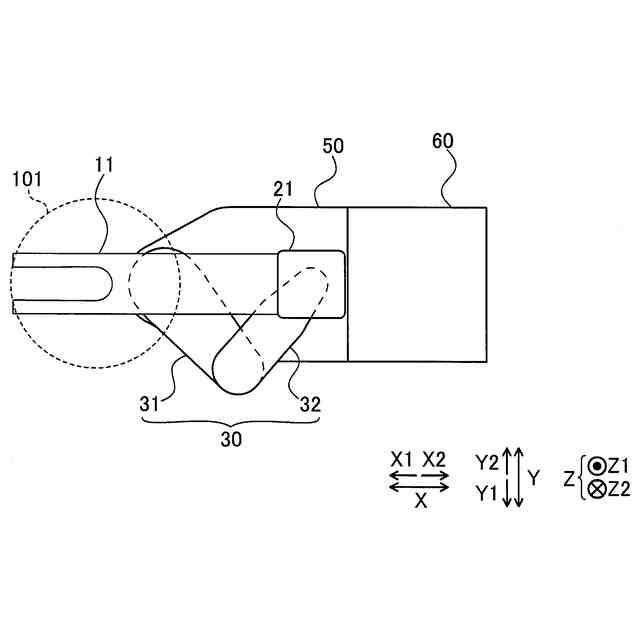
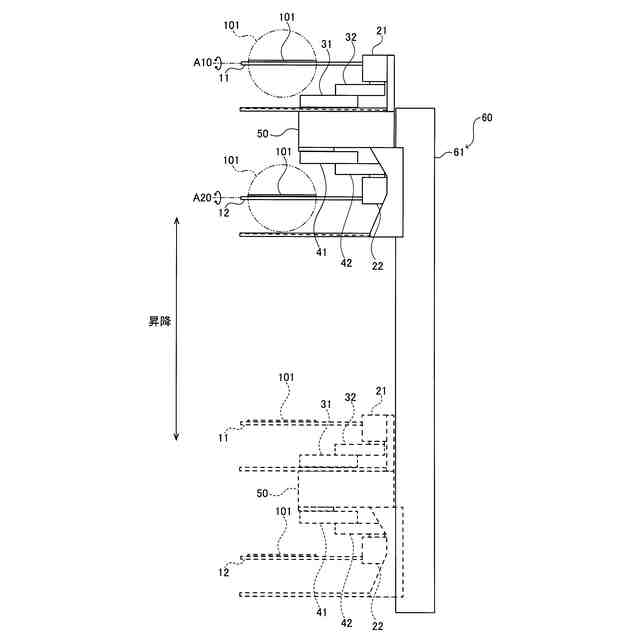
【解決手段】この基板搬送ロボット100は、ハンド11を水平方向に沿って移動させる水平多関節の上アーム30と、ハンド12を水平方向に沿って移動させる水平多関節の下アーム40とを備える。上アーム30は、互いに水平面に沿って回転する上基端リンク部と上先端リンク部とを含む。下アーム40は、互いに水平面に沿って回転する下基端リンク部と下先端リンク部とを含む。また、基板搬送ロボット100は、アーム支持部50と、アーム支持部50を昇降移動させることによって、ハンド11およびハンド12を昇降移動させる昇降部60と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
各々が基板を保持する上ハンドおよび下ハンドと、
互いに水平面に沿って回転する上基端リンク部と上先端リンク部とを含み、前記上ハンドを水平方向に沿って移動させる水平多関節の上アームと、
前記上アームとは別個に配置され、互いに水平面に沿って回転する下基端リンク部と下先端リンク部とを含み、前記下ハンドを水平方向に沿って移動させる水平多関節の下アームと、
前記上アームが上方に接続され、前記下アームが下方に接続されるアーム支持部と、
前記アーム支持部を昇降移動させることによって、前記上ハンドおよび前記下ハンドを昇降移動させる昇降部と、を備える、基板搬送ロボット。
続きを表示(約 1,700 文字)
【請求項2】
前記上ハンドの基端に接続され、前記上ハンドを、水平方向に沿って延びる回転軸線回りに回転させる上ハンド回転部と、
前記下ハンドの基端に接続され、前記下ハンドを、水平方向に沿って延びる回転軸線回りに回転させる下ハンド回転部とを、さらに備える、請求項1に記載の基板搬送ロボット。
【請求項3】
前記上ハンド回転部は、前記上アームの上方に接続され、前記上ハンドに保持される前記基板の半径よりも小さい距離だけ、上下方向に前記上アームから離間した位置において前記上ハンドを支持し、
前記下ハンド回転部は、前記下アームの下方に接続され、前記下ハンドに保持される前記基板の半径よりも小さい距離だけ、上下方向に前記下アームから離間した位置において前記下ハンドを支持する、請求項2に記載の基板搬送ロボット。
【請求項4】
前記上ハンド回転部は、前記上ハンドに保持される前記基板の半径よりも小さい距離だけ、上下方向に前記上アームの前記上基端リンク部から離間した位置において前記上ハンドを支持し、
前記下ハンド回転部は、前記下ハンドに保持される前記基板の半径よりも小さい距離だけ、上下方向に前記下アームの前記下基端リンク部から離間した位置において前記下ハンドを支持する、請求項3に記載の基板搬送ロボット。
【請求項5】
前記昇降部は、上下方向に沿って延びる柱状部を含み、前記柱状部に沿って前記アーム支持部を昇降移動させ、
前記アーム支持部は、平面視において、前記昇降部の前記柱状部の側面に垂直な方向に沿って延びて配置されており、
前記上アームおよび前記下アームの各々は、前記昇降部の前記柱状部から水平方向に沿って所定の距離分離間した位置において、前記アーム支持部に接続されている、請求項1に記載の基板搬送ロボット。
【請求項6】
前記上基端リンク部は、前記アーム支持部の上方に接続され、前記上基端リンク部の前記アーム支持部に接続されている位置から先端までの長さは前記所定の距離より小さく、
前記下基端リンク部は、前記アーム支持部の下方に接続され、前記下基端リンク部の前記アーム支持部に接続されている位置から先端までの長さは前記所定の距離より小さい、請求項5に記載の基板搬送ロボット。
【請求項7】
前記上アームおよび前記下アームの動作を制御する制御部をさらに備え、
前記制御部は、
平面視において前記上ハンド回転部が前記アーム支持部と重畳した位置に配置された状態で前記上ハンド回転部により前記上ハンドを水平方向に沿って延びる回転軸線回りに回転させるとともに、
平面視において前記下ハンド回転部が前記アーム支持部と重畳した位置に配置された状態で前記下ハンド回転部により前記下ハンドを水平方向に沿って延びる回転軸線回りに回転させる、請求項2に記載の基板搬送ロボット。
【請求項8】
前記制御部は、
平面視において前記上先端リンク部が前記上基端リンク部よりも前記昇降部に近い位置に配置された状態で、前記上ハンド回転部により前記上ハンドを水平方向に沿って延びる回転軸線回りに回転させるとともに、
平面視において前記下先端リンク部が前記下基端リンク部よりも前記昇降部に近い位置に配置された状態で、前記下ハンド回転部により前記下ハンドを水平方向に沿って延びる回転軸線回りに回転させる、請求項7に記載の基板搬送ロボット。
【請求項9】
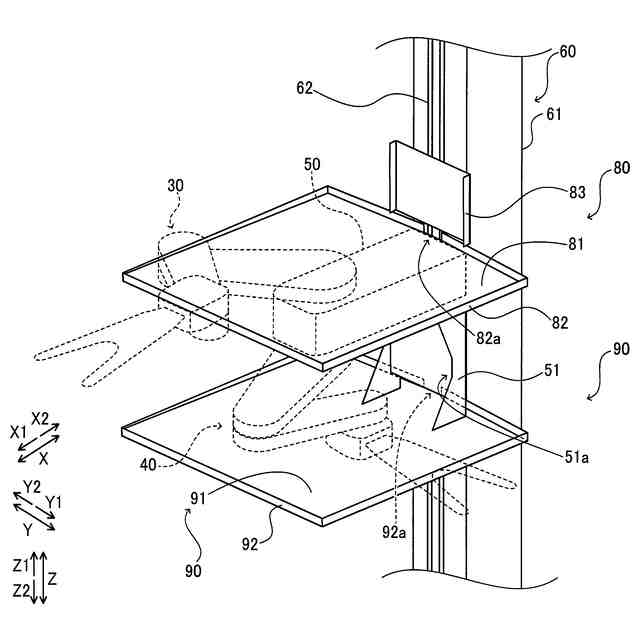
前記上ハンドの下方において水平面に沿って配置された板状の上液受け部と、
前記下ハンドの下方において水平面に沿って配置された板状の下液受け部とを、さらに備える、請求項1に記載の基板搬送ロボット。
【請求項10】
前記上液受け部は、前記アーム支持部の上方に接続され、
前記下液受け部は、前記アーム支持部の下方に接続されている、請求項9に記載の基板搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボットに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、基板搬送ロボットが開示されている。特許文献1には、基板を搬送するロボットが開示されている。このロボットは、基板としてのウエハが搭載される第1ハンドおよび第2ハンドを備えている。第1ハンドは、第1アームの先端に連結されている。第2ハンドは、第2アームの先端に連結されている。第1アームの基端側と第2アームの基端側とは、アーム支持部に回動可能に連結されている。そして、アーム支持部は、柱部により上下方向に移動可能に保持されている。また、第1アームおよび第2アームの各々は1つのリンク部材により構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-33737号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されたロボットのように、上下方向に移動するアーム支持部に対して、1つのリンク部材により構成されたアームを連結する場合において、ハンドの動作範囲を大きくするためにはリンク部材の大きさを大きくする必要がある。したがって、ハンドの動作範囲を大きくするために、基板搬送ロボットの占める空間の領域が大型化する。また、1つのリンク部材により構成されたアームによりハンドに保持された基板を搬送する場合には、ハンドによりアクセス可能な位置の動作範囲が限定される。そこで、基板搬送ロボットの占める空間の領域の大型化を抑制しながら、ハンドの動作範囲を大きくすることが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板搬送ロボットの占める空間の領域の大型化を抑制しながら、ハンドの動作範囲を大きくすることが可能な基板搬送ロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による基板搬送ロボットは、各々が基板を保持する上ハンドおよび下ハンドと、互いに水平面に沿って回転する上基端リンク部と上先端リンク部とを含み、上ハンドを水平方向に沿って移動させる水平多関節の上アームと、上アームとは別個に配置され、互いに水平面に沿って回転する下基端リンク部と下先端リンク部とを含み、下ハンドを水平方向に沿って移動させる水平多関節の下アームと、上アームが上方に接続され、下アームが下方に接続されるアーム支持部と、アーム支持部を昇降移動させることによって、上ハンドおよび下ハンドを昇降移動させる昇降部と、を備える。
【0007】
この開示の第1の局面による基板搬送ロボットは、上記のように、互いに水平面に沿って回転する上基端リンク部と上先端リンク部とを含み、上ハンドを水平方向に沿って移動させる水平多関節の上アームと、上アームとは別個に配置され、互いに水平面に沿って回転する下基端リンク部と下先端リンク部とを含み、下ハンドを水平方向に沿って移動させる水平多関節の下アームとを備える。これにより、上アームが上基端リンク部と上先端リンク部との2つのリンク部材により構成されており、下アームが下基端リンク部と下先端リンク部との2つのリンク部材により構成されているので、2つのリンク部材同士を折り畳むことによって、上アームおよび下アームの占める空間の領域が大型化することを抑制しながら、上ハンドおよび下ハンドの各々の動作範囲を大きくできる。その結果、基板搬送ロボットの占める空間の領域の大型化を抑制しながら、ハンドの動作範囲を大きくできる。
【0008】
この開示の第2の局面による基板搬送ロボットは、基板を保持するハンドと、互いに水平面に沿って回転する基端リンク部と先端リンク部とを含み、ハンドを水平方向に沿って移動させる水平多関節のアームと、アームが下方に接続されるアーム支持部と、アーム支持部を昇降移動させることによって、ハンドを昇降移動させる昇降部と、を備える。
【0009】
この開示の第2の局面による基板搬送ロボットは、上記のように、互いに水平面に沿って回転する基端リンク部と先端リンク部とを含み、ハンドを水平方向に沿って移動させる水平多関節のアームを備える。これにより、アームが基端リンク部と先端リンク部との2つのリンク部材により構成されているので、2つのリンク部材同士を折り畳むことによって、アームの占める空間の領域が大型化することを抑制しながら、ハンドの各々の動作範囲を大きくできる。また、アームがアーム支持部の下方に接続されているため、アーム支持部よりもさらに下方の位置にハンドがアクセスすることができる。これらの結果、基板搬送ロボットの占める空間の領域の大型化を抑制しながら、ハンドの動作範囲を大きくできる。
【発明の効果】
【0010】
本開示によれば、基板搬送ロボットの占める空間の領域の大型化を抑制しながら、ハンドの動作範囲を大きくできる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
10日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
14日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
位置情報システム
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
クローズドインペラ
2日前
川崎重工業株式会社
正極活物質の再生方法
3日前
川崎重工業株式会社
液化ガス導入システム
10日前
川崎重工業株式会社
電池セル及びその分解方法
24日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
2日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
1か月前
川崎重工業株式会社
電力供給システムおよびその制御方法
9日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
9日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
2日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
1日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
6日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
多重殻タンク
20日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
15日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
1か月前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
14日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ