TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130739
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024027982
出願日
2024-02-28
発明の名称
クローズドインペラ
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
F04D
29/30 20060101AFI20250902BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】応力の低減が可能なクローズドインペラを提供する。
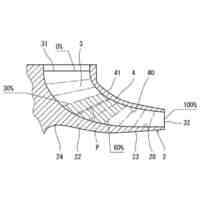
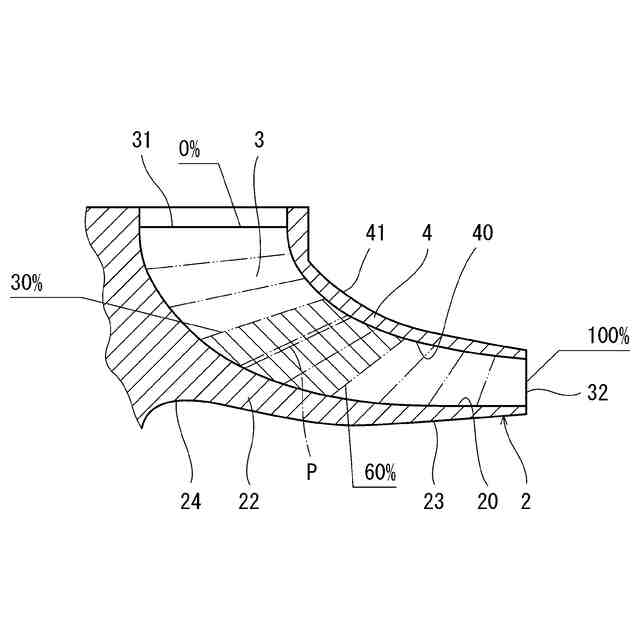
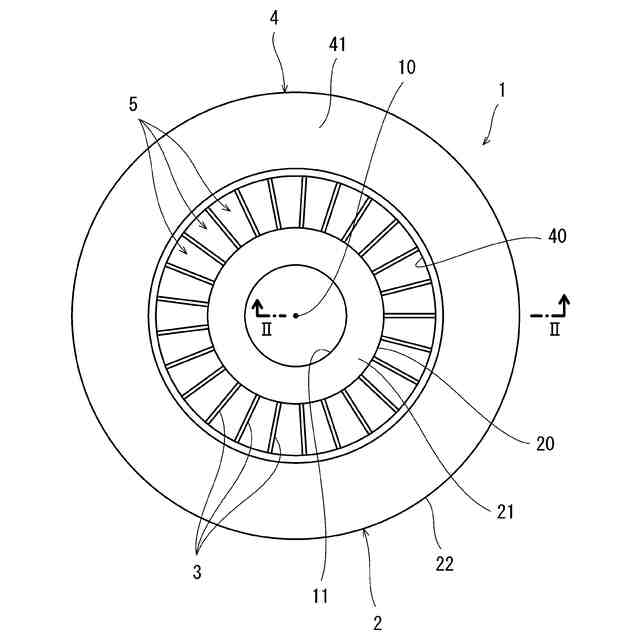
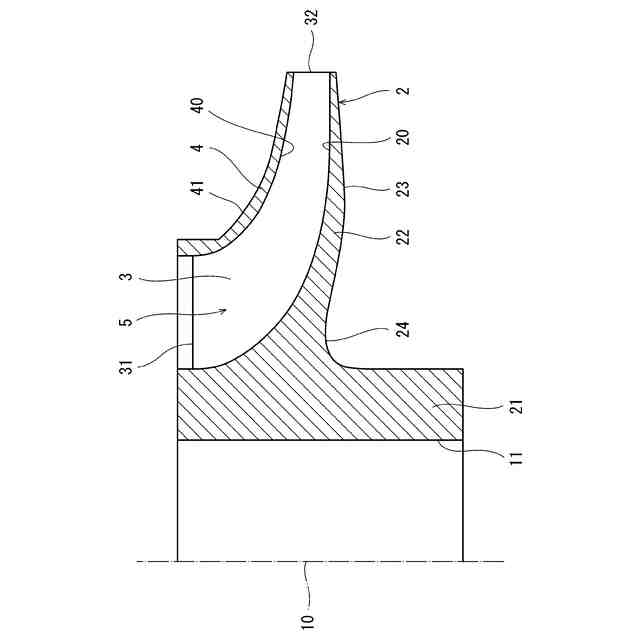
【解決手段】一実施形態に係るクローズドインペラは、遠心圧縮機に用いられるものであり、軸方向流れを径方向流れに誘導する凹状曲面20を有するハブ2と、凹状曲面20と対向する凸状曲面40を含むシュラウド4と、ハブ2とシュラウド4との間で周方向に並ぶ、ハブ2とシュラウド4とを連結する複数のブレード3を含む。各ブレード3の板厚は、前縁31から所定位置Pまでは増大し、所定位置Pから後端32までは減少する。子午面図において、前縁31から後縁32までのブレード3の長さを百分率で表したときに、所定位置Pは30%以上60%以下の範囲内にある。
【選択図】図4
特許請求の範囲
【請求項1】
遠心圧縮機に用いられるクローズドインペラであって、
軸方向流れを径方向流れに誘導する凹状曲面を含むハブと、
前記凹状曲面と対向する凸状曲面を含むシュラウドと、
前記ハブと前記シュラウドとの間で周方向に並ぶ、前記ハブと前記シュラウドとを連結する複数のブレードと、を備え、
前記複数のブレードのそれぞれの板厚は、前縁から所定位置までは増大し、前記所定位置から後端までは減少し、
子午面図において、前記前縁から前記後縁までの前記ブレードの長さを百分率で表したときに、前記所定位置は30%以上60%以下の範囲内にある、クローズドインペラ。
続きを表示(約 260 文字)
【請求項2】
前記ハブは、前記凹状曲面に沿って径方向に広がるディスク部を含み、
前記ディスク部の前記凹状曲面と反対側の背面は、径方向内側に向かうにつれて前記凹状曲面に近づくように窪む窪みを有する、請求項1に記載のクローズドインペラ。
【請求項3】
前記複数のブレードのそれぞれは、互いに反対側を向く一対の側面を有し、
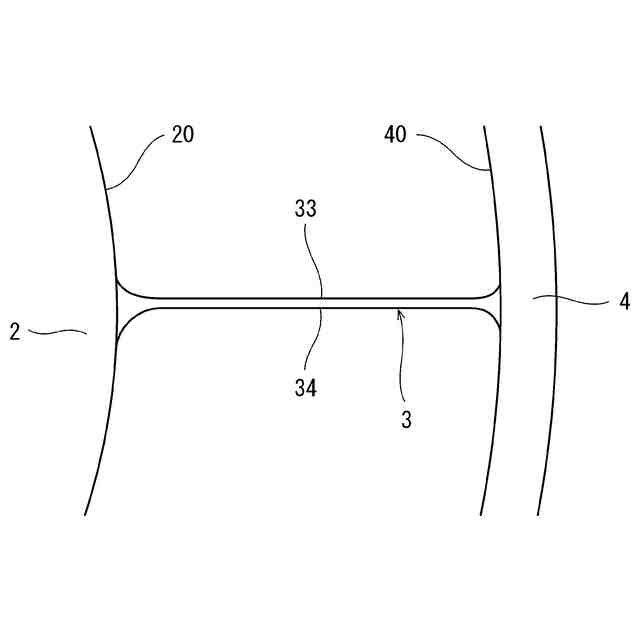
前記一対の側面は、互いに遠ざかりながら前記凹状曲面につながるとともに、互いに遠ざかりながら前記凸状曲面につながる、請求項1または2に記載のクローズドインペラ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠心圧縮機に用いられるクローズドインペラに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
遠心圧縮機においては、効率確保の観点から、ガスの流れる流路が閉じられたクローズドインペラが用いられることがある。クローズドインペラでは、ハブとシュラウドとが周方向に並ぶ複数のブレードにより連結される。ハブは軸方向流れを径方向流れに誘導する凹状曲面を含み、シュラウドは前記凹状曲面と対向する凸状曲面を含む。
【先行技術文献】
【特許文献】
【0003】
特開2016-98757号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠心圧縮機においては、クローズドインペラを高速で回転させたいという要望がある。特に、水素用の遠心圧縮機では、クローズドインペラの最高周速が500m/s以上となることがある。
【0005】
クローズドインペラが高速で回転する場合、クローズドインペラには大きな遠心力が作用するため、クローズドインペラの応力を低減することが望まれる。この点、特許文献1には強度を向上させるためにブレードを径方向外側に向かって先細り形状とすることが記載されているが、特許文献1はシュラウドが別体となったオープンインペラに関するものであり、クローズドインペラに関するものではない。
【0006】
そこで、本開示は、応力の低減が可能なクローズドインペラを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示は、遠心圧縮機に用いられるクローズドインペラであって、軸方向流れを径方向流れに誘導する凹状曲面を含むハブと、前記凹状曲面と対向する凸状曲面を含むシュラウドと、前記ハブと前記シュラウドとの間で周方向に並ぶ、前記ハブと前記シュラウドとを連結する複数のブレードと、を備え、前記複数のブレードのそれぞれの板厚は、前縁から所定位置までは増大し、前記所定位置から後端までは減少し、子午面図において、前記前縁から前記後縁までの前記ブレードの長さを百分率で表したときに、前記所定位置は30%以上60%以下の範囲内にある、クローズドインペラを提供する。
【発明の効果】
【0008】
本開示によれば、応力の低減が可能なクローズドインペラが提供される。
【図面の簡単な説明】
【0009】
一実施形態に係るクローズドインペラの平面図である。
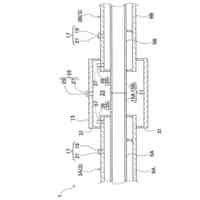
図1のII-II線に沿った子午面図である。
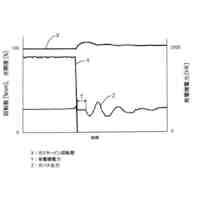
ブレードの前縁から後縁までの板厚の変化を示すグラフである。
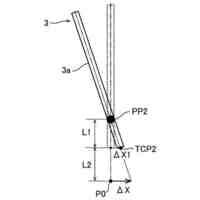
子午面図においてブレードの前縁から後縁までの割合を示した図である。
図1の一部の拡大図である。
【発明を実施するための形態】
【0010】
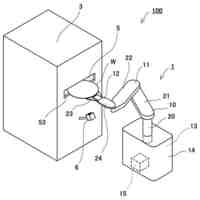
図1に、一実施形態に係るクローズドインペラ1を示す。クローズドインペラ1は遠心圧縮機に用いられるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
11日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
15日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
位置情報システム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
クローズドインペラ
3日前
川崎重工業株式会社
液化ガス導入システム
11日前
川崎重工業株式会社
正極活物質の再生方法
4日前
川崎重工業株式会社
電池セル及びその分解方法
25日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
3日前
川崎重工業株式会社
電力供給システムおよびその制御方法
10日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
10日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
3日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
2日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
7日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
多重殻タンク
21日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
16日前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
15日前
中国電力株式会社
ポート検出器、ポート異常検出システム、ポート検出器の製造方法及びポート異常検出方法
23日前
個人
圧縮機
4か月前
ダイニチ工業株式会社
空調装置
3か月前
カヤバ株式会社
電動ポンプ
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ