TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150749
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051800
出願日
2024-03-27
発明の名称
無人搬送車
出願人
株式会社アマダ
代理人
個人
,
個人
,
個人
主分類
B62B
5/00 20060101AFI20251002BHJP(鉄道以外の路面車両)
要約
【課題】小型化及び多機能化が容易な無人搬送車を提供する。
【解決手段】無人搬送車(91)は、駆動輪(2L,2R)を含み床(FL)に接地する4つの車輪(2L,2R,3L,3R)と、4つの車輪のうちの二つの車輪(2L,3L)を連結支持する第1アーム(61)と、4つの車輪のうちの残りの二つの車輪(2R,3R)を連結支持する第2アーム(71)と、第1アーム(61)を揺動不能に支持し、第2アーム(71)を二つの車輪(2R,3R)の間の位置で揺動可能に支持するフレーム(12)と、を備えている。
【選択図】図2
特許請求の範囲
【請求項1】
駆動輪を含み床に接地する4つの車輪と、
前記4つの車輪のうちの二つの車輪を連結支持する第1アームと、
前記4つの車輪のうちの残りの二つの車輪を連結支持する第2アームと、
前記第1アームを揺動不能に支持し、前記第2アームを前記二つの車輪の間の位置で揺動可能に支持するフレームと、
を備えた無人搬送車。
続きを表示(約 380 文字)
【請求項2】
周囲の物体の有無を検出するセンサを備え、
前記センサは、前記第2アームよりも前記第1アームに近い位置に配置されている請求項1記載の無人搬送車。
【請求項3】
前記床が平坦な場合に、前記センサは、前記床に平行な平面上の物体の有無を検出する請求項2記載の無人搬送車。
【請求項4】
前記第1アームは、前記フレームによって回動自在に支持され、
前記第1アームに対し揺動不能となるよう当接する固定プレートを有する請求項1記載の無人搬送車。
【請求項5】
前記第1アームで支持された前記二つの車輪のうちの一つと、
前記第2アームで支持された前記二つの車輪のうちの一つと、が駆動輪であり、
残りの二つの車輪が従動輪である請求項1~4のいずれか1項に記載の無人搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人搬送車に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に、4輪の無人搬送車において、サスペンション構造を搭載せず接地面の凹凸によらず、常に4輪接地を可能とする車輪構造が記載されている。特許文献1に記載された車輪構造は、無人搬送車の重心を二つの駆動輪側に置き、残り二つの従動輪を偏心シャフトで連結して揺動自在とするものである。この車輪構造は、二つの従動輪それぞれの接地すべき被接地部位の高さが異なっていても、二つの従動輪から接地反力が得られるよう偏心シャフトが自動的に回動して各従動輪の軸の高さ位置を自動調整するようになっている。
【先行技術文献】
【特許文献】
【0003】
特開平10-338145号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された4輪の無人搬送車の車輪構造は、二つの従動輪を偏心シャフトで連結するため、従動輪の間に他の部材を配置するスペースが得られない。そのため、無人搬送車を構成する部品のレイアウトの自由度が低下し小型化及び多機能化の妨げになるという点で改善の余地がある。
【課題を解決するための手段】
【0005】
上記の課題を解決するために、本発明の1又はそれ以上の実施形態の一態様は、
駆動輪を含み床に接地する4つの車輪と、前記4つの車輪のうちの二つの車輪を連結支持する第1アームと、前記4つの車輪のうちの残りの二つの車輪を連結支持する第2アームと、前記第1アームを揺動不能に支持し、前記第2アームを前記二つの車輪の間の位置で揺動可能に支持するフレームと、を備えた無人搬送車である。
【発明の効果】
【0006】
本発明の1又はそれ以上の実施形態に係る無人搬送車によれば、小型化及び多機能化が容易になる、という効果が得られる。
【図面の簡単な説明】
【0007】
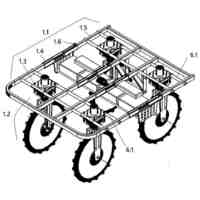
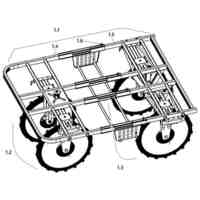
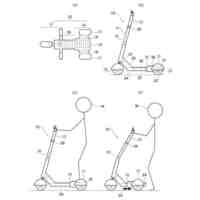
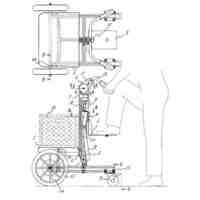
図1は、本発明の一態様の無人搬送車91示す左前斜め上方から見た斜視図である。
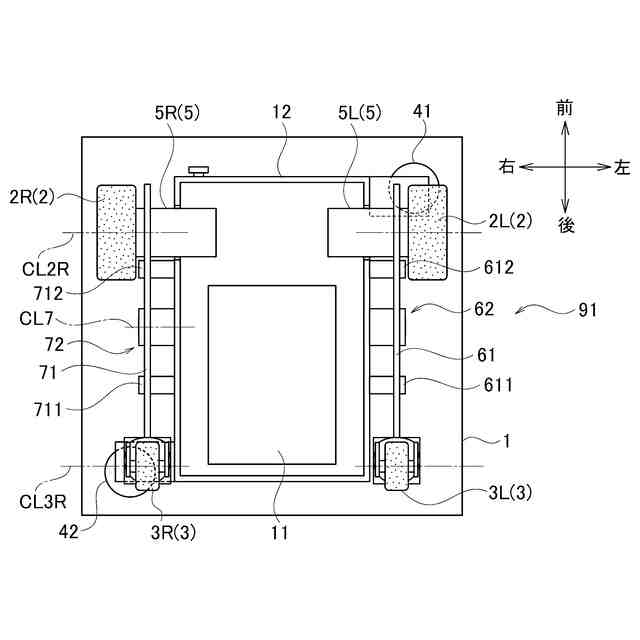
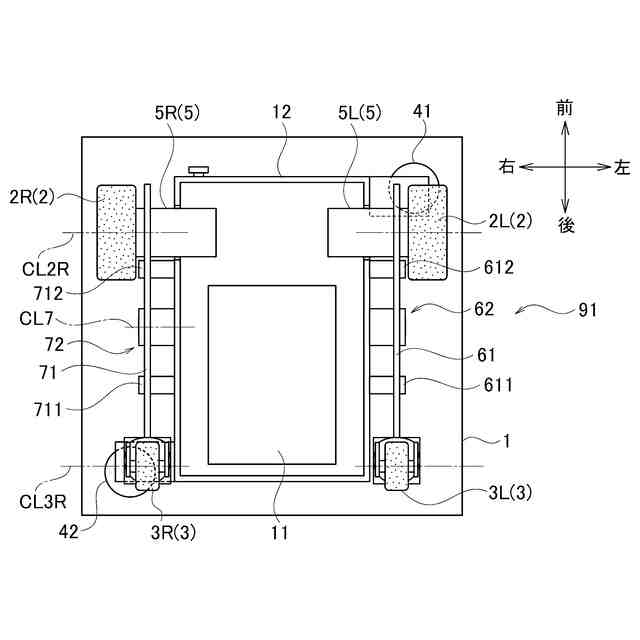
図2は、無人搬送車91の下面図である。
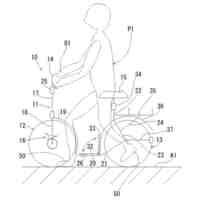
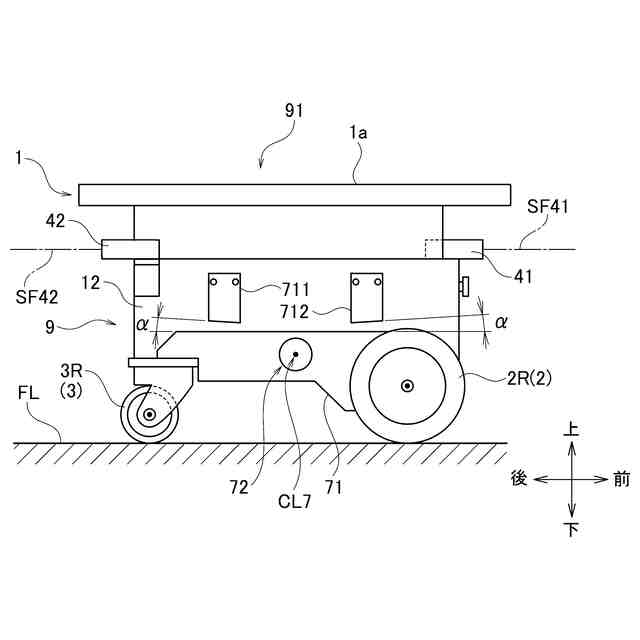
図3は、無人搬送車91の右側面図である。
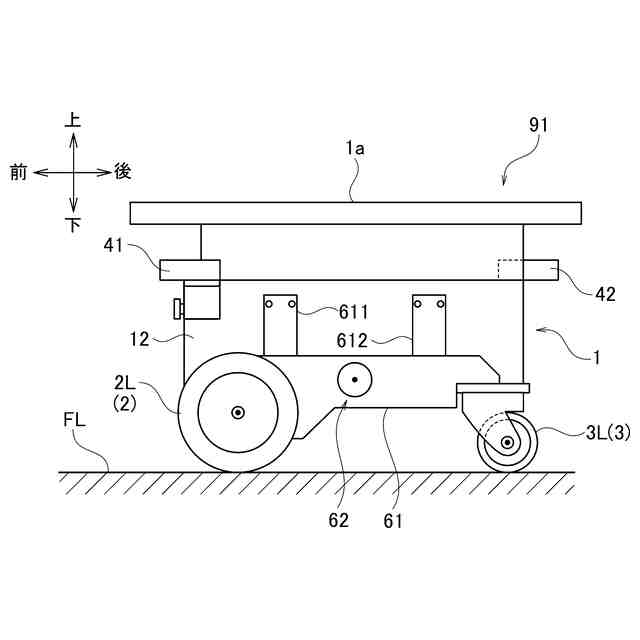
図4は、無人搬送車91の左側面図である。
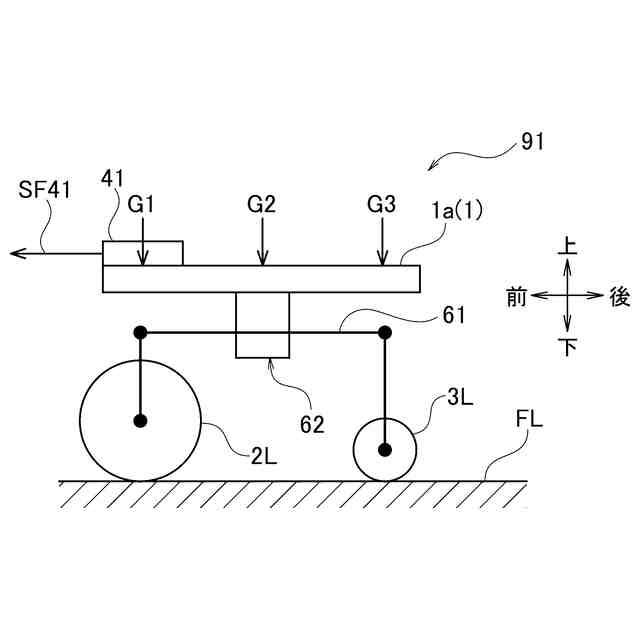
図5Aは、無人搬送車91の動作を説明するための模式的右側面図である。
図5Bは、無人搬送車91の動作を説明するための模式的左側面図である。
図6は、比較例の無人搬送車P91の動作を説明するための模式的左側面図である。
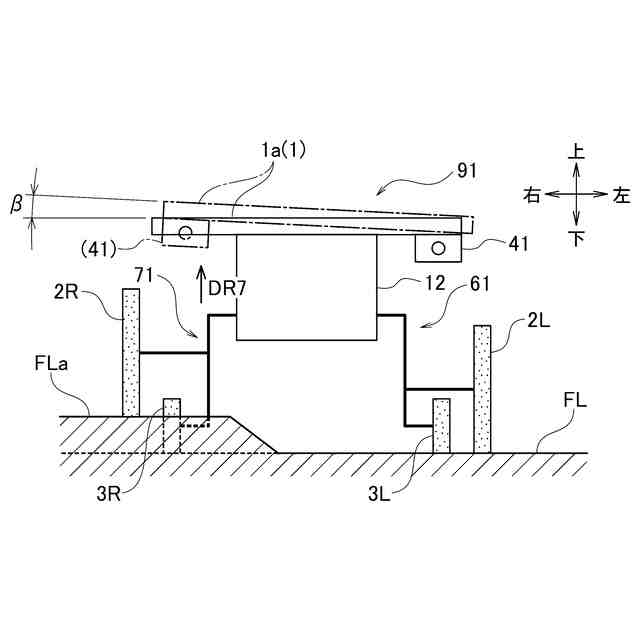
図7は、無人搬送車91の動作を説明するための模式的前面図である。
【発明を実施するための形態】
【0008】
本発明の実施形態の一態様である無人搬送車91の構成について、図1~図4を参照して説明する。図1は、本発明の一態様の無人搬送車91示す左前斜め上方から見た斜視図である。図2は、無人搬送車91の下面図である。図3は、無人搬送車91の右側面図である。図4は、無人搬送車91の左側面図である。説明の便宜上、上下左右前後の各方向を、図1に示される矢印の方向に規定する。上下方向は鉛直方向である。
【0009】
図1及び図2に示されるように、無人搬送車91は、外観上、上下方向に薄い直方体の本体部1を有する。本体部1は、内部に、骨格となる枠状のフレーム12を有する。本体部1の下部には、前部の隅部それぞれにモータ5で駆動される車輪である駆動輪2を有し、後部の隅部に車輪として従動輪3を有する。具体的には、駆動輪2は左右一対の駆動輪2L,2Rでありそれぞれモータ5L,5Rで独立に駆動される。従動輪3は、いわゆる自在キャスタの左右一対の従動輪3L,3Rである。なお、図1に示される外観は意匠的な処理を施したものであり、図2~図4に示される構造図とは必ずしも形状及び寸法比率は一致していない。
【0010】
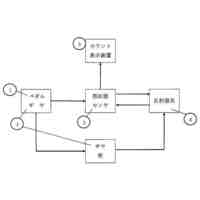
本体部1の内部には、無人搬送車91の動作を制御する制御部11が搭載されている。制御部11は、予め記憶された走行プログラムなどに基づいて、モータ5L,5Rの回転速度及び回転方向を、独立して制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アマダ
曲げ金型
1か月前
株式会社アマダ
無人搬送車
10日前
株式会社アマダ
レーザ発振器
1か月前
株式会社アマダ
工作機械制御装置
10日前
株式会社アマダ
レーザ切断加工機
2か月前
株式会社アマダ
見積り作成システム
11日前
株式会社アマダ
加工システム及び加工性判定システム
3日前
株式会社アマダ
発注システム、発注方法及び発注プログラム
1か月前
株式会社アマダ
プレスブレーキ制御装置及び曲げ速度算出方法
17日前
株式会社アマダ
スポット溶接機及びスポット溶接機のワーク溶接方法
1か月前
株式会社アマダ
生産管理システム、生産管理方法及び生産管理プログラム
10日前
株式会社アマダ
タレットパンチプレス及びタレットパンチプレスの制御方法
20日前
株式会社アマダ
溶接加工プログラム設定装置、溶接加工制御装置及び溶接加工システム
2か月前
株式会社アマダ
図形データ作成装置、図形データ作成方法、及び図形データ作成プログラム
1か月前
株式会社アマダ
生産管理システム、生産シミュレーション装置、生産シミュレーション方法及び生産シミュレーションプログラム
12日前
個人
カート
3か月前
個人
走行装置
3か月前
個人
電動走行車両
3か月前
個人
乗り物
5か月前
個人
駐輪設備
1か月前
個人
発音装置
7か月前
個人
閂式ハンドル錠
3か月前
個人
電動モビリティ
7か月前
個人
折り畳み自転車
10か月前
個人
自転車用歩数計
4日前
個人
自転車用傘捕捉具
11か月前
個人
ボギー・フレーム
2か月前
個人
三輪電動車両
4日前
個人
ルーフ付きトライク
1か月前
個人
“zen-go.”
2か月前
個人
自由方向乗車自転車
7か月前
個人
ルーフ付きトライク
2か月前
個人
体重掛けリフト台車
11か月前
個人
アタッチメント
11か月前
個人
パワーアシスト自転車
2か月前
個人
自転車用荷物台
11か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ