TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162617
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2024065881
出願日
2024-04-16
発明の名称
負荷制御装置
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
G05B
13/04 20060101AFI20251021BHJP(制御;調整)
要約
【課題】軌道拘束された制御対象に対する負荷計算の軽減および負荷設計の自由度を確保する。
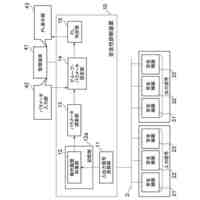
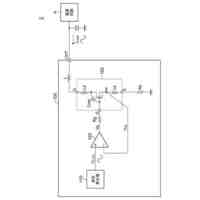
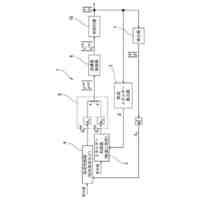
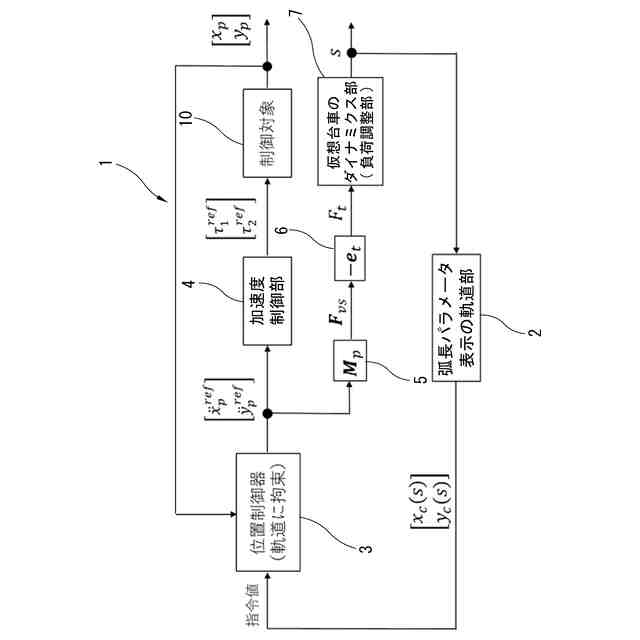
【解決手段】負荷制御装置1の仮想台車のダイナミクス部7は、拘束軌道上を走行する仮想台車を想定し、軌道の接線方向に仮想台車を動かす力から前記台車が進んだ距離を示す弧長パラメータを出力する。弧長パラメータ表示の軌道部2は仮想台車の位置座標を出力し、位置制御器3は制御対象10の位置を前記位置座標と同期させる加速度参照値(式1)を出力する。加速度制御部4は、加速度参照値(式1)に基づき制御対象10の各アクチュエータのトルク指令値(式2)を算出し、算出された各トルク指令値(式2)を制御対象10に出力する。
【選択図】図1
特許請求の範囲
【請求項1】
拘束軌道上を走行する仮想台車を想定し、前記仮想台車の位置と制御対象の位置を同期させることで制御対象の運動軌道を拘束し、該軌道上の運動に負荷を与える装置であって、
前記軌道の接線方向に前記仮想台車を動かす力から前記仮想台車が進んだ距離を示す弧長パラメータを出力するダイナミクス部と、
前記弧長パラメータが入力され、前記仮想台車の軌道を前記弧長パラメータの軌道に拘束し、前記仮想台車の位置座標を出力する軌道部と、
前記制御対象の位置情報と前記仮想台車の位置座標とが入力され、前記制御対象の位置を前記仮想台車の位置座標と同期させる加速度参照値を出力する位置制御器と、
前記制御対象の各アクチュエータの前記加速度参照値が入力され、入力された前記各加速度参照値に基づき前記各アクチュエータのトルク指令値を算出し、算出された各トルク指令値を前記制御対象に出力する加速度制御部と、
を備えることを特徴とする負荷制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記ダイナミクス部は、
式6により弧長パラメータsを算出し、
TIFF
2025162617000024.tif
34
166
M
sv
=前記仮想台車の慣性
F
t
=軌道の接線方向に前記仮想台車を動かす力(反力[-F
t
]と軌道の接線方向の単位ベクトル[e
t
]の内積で求められる。)
前記軌道部は、前記仮想台車の位置座標を前記弧長パラメータsに関するパラメータ表示の曲線[x
c
(s),y
c
(s)]と定義して出力し、
前記位置制御器は、前記制御対象の位置[x
p
,y
p
]を前記仮想台車の位置座標[x
c
(s),y
c
(s)]と同期させるため、式1に示すxy方向の前記加速度参照値を出力し、
TIFF
2025162617000025.tif
25
166
前記加速度制御部は、前記各加速度参照値に基づき式2に示す前記各アクチュエータのトルク指令値を算出し、算出された前記各トルク指令値を前記制御対象に出力し、
TIFF
2025162617000026.tif
29
166
前記制御対象の運動軌道を弧長パラメータsに関する数直線で表現される二次元平面(x,y平面)の軌道上に拘束して所望の負荷を与える
ことを特徴とする請求項1記載の負荷制御装置。
【請求項3】
前記弧長パラメータは、式(13)により算出され、
TIFF
2025162617000027.tif
36
166
前記軌道部は、前記仮想台車の位置座標を前記弧長パラメータsに関するパラメータ表示の曲線[x
c
(s),y
c
(s),z
c
(s)] と定義して出力し、
前記位置制御器は、前記制御対象の位置[x
p
,y
p
,z
p
]を前記仮想台車の位置座標[x
c
(s),y
c
(s),z
c
(s)] と同期させるため、式9に示すxyz方向の加速度参照値を出力し、
TIFF
2025162617000028.tif
41
166
前記加速度制御部は、前記各加速度参照値に基づき式10に示す前記各アクチュエータのトルク指令値を算出し、算出された各トルク指令値を前記制御対象に出力し、
TIFF
2025162617000029.tif
40
166
前記制御対象の運動軌道を弧長パラメータsに関する数直線で表現される三次元空間(x,y,z空間)の軌道上に拘束して所望の負荷を与える
ことを特徴とする請求項1記載の負荷制御装置。
【請求項4】
前記制御対象に直接負荷を印加する力制御器をさらに備え、
前記力制御器は、所望の負荷に応じた前記アクチュエータの加速度参照値を前記制御対象に出力する
ことを特徴とする請求項1記載の負荷制御装置。
【請求項5】
前記力制御器の出力する加速度参照値は、
前記制御対象の反力センサの応答値または推定値に応じて算出されることを特徴とする請求項4記載の負荷制御装置。
【請求項6】
前記制御対象は、
前記アクチュエータとして、
x軸の回転運動に対する電動機と、
y軸の直動運動に対する電動機と、
を備え、
前記位置制御器には、前記各電動機の位置応答「x,y」が前記制御対象の位置「x
p
,y
p
」として入力される
ことを特徴とする請求項2記載の負荷制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御対象の動作する軌道を制御し、軌道上の動作に対する負荷を制御する装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
非特許文献1は、「拘束する軌道およびトルクリミットを拘束条件とし、最短時間で拘束する軌道に向かう制御入力を求める」最適化問題を定式化し、解を算出している。
【0003】
特許文献1および非特許文献2は、ロボットの手先位置を経路へ誘導するポテンシャル場を生成する。そのようなポテンシャル場を生成するためには、カーネルガウス関数を要素とする多くのポテンシャル場の重ね合わせ・重み調整が必要となる。経路への拘束を強めるためには谷断面の傾斜を急勾配とし、経路上の推進力を高めるには谷底の経路の落差を大きくするなどのポテンシャルの設計を行う。
【先行技術文献】
【特許文献】
【0004】
US11554485B2
【非特許文献】
【0005】
”An Efficient Robot Arm Control Under Geometric Path Constraints”
“Learning Potential Functions from Human Demonstrations with Encapsulated Dynamic and Compliant Behaviors”
Kiyoshi Ohishi,Yuzuru Ohba,Seiichiro Katsura “Kinematics and Dynamics of Motion Control Based on Acceleration Control” IEEJ Trans.IA,Vol.127,No6.2007
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、非特許文献1の技術は、制御対象の軌道を拘束することは可能なものの、軌道上の動作に対する負荷調整は想定されていない。
【0007】
そこで、非特許文献2および特許文献1の技術が提案されているが、ポテンシャル場が複雑であるほど要素となる関数の重ね合わせ・重み調整が多く必要となり、計算負荷が高まるおそれがある。
【0008】
また、軌道上の負荷については、ポテンシャル場の保存力を通して与えているため、時間に応じた負荷の変化などは与えることができず、負荷の設計自由度が制限されるおそれもある。
【0009】
本発明は、このような従来技術の問題を解決するためになされ、軌道拘束された制御対象に対する負荷計算の軽減および負荷設計の自由度を確保することを解決課題としている。
【課題を解決するための手段】
【0010】
(1)本発明は、拘束軌道上を走行する仮想台車を想定し、前記仮想台車の位置と制御対象の位置を同期させることで制御対象の運動軌道を拘束し、該軌道上の運動に負荷を与える装置であって、
前記軌道の接線方向に前記仮想台車を動かす力から前記仮想台車が進んだ距離を示す弧長パラメータを出力するダイナミクス部と、
前記弧長パラメータが入力され、前記仮想台車の軌道を前記弧長パラメータの軌道に拘束し、前記仮想台車の位置座標を出力する軌道部と、
前記制御対象の位置情報と前記仮想台車の位置座標とが入力され、前記制御対象の位置を前記仮想台車の位置座標と同期させるための加速度参照値を出力する位置制御器と、
前記制御対象の各アクチュエータの前記加速度参照値が入力され、入力された前記各加速度参照値に基づき前記各アクチュエータのトルク指令値を算出し、算出された各トルク指令値を前記制御対象に出力する加速度制御部と、を備えることを特徴としている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社熊谷組
障害物の検出方法
22日前
ローム株式会社
基準電圧源
1か月前
新電元工業株式会社
作業用ロボット
20日前
豊田合成株式会社
機器制御装置
27日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
16日前
株式会社ダイフク
物品搬送設備
1日前
カヤバ株式会社
減圧弁
29日前
キヤノン株式会社
配送システム
1か月前
株式会社CAOS
移動体の制御システム
1か月前
株式会社TMEIC
安全性診断装置
1か月前
村田機械株式会社
搬送車システム
21日前
株式会社アマダ
工作機械制御装置
21日前
日野自動車株式会社
自動運転装置
21日前
株式会社カーメイト
アクセルペダルカバー
27日前
ローム株式会社
電源回路用の電子負荷装置
1か月前
シンフォニアテクノロジー株式会社
自動走行車両
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
オムロン株式会社
システム及び方法
2日前
オムロン株式会社
システム及び方法
2日前
株式会社明電舎
負荷制御装置
2日前
株式会社明電舎
負荷制御装置
2日前
株式会社明電舎
負荷制御装置
2日前
株式会社マキタ
運搬車
1か月前
ローム株式会社
電源装置
20日前
株式会社東海ヒット
複段圧力差生成システム
29日前
株式会社マキタ
運搬車
1か月前
IDEC株式会社
教示装置
27日前
セコム株式会社
自律移動ロボット
20日前
株式会社TMEIC
通信伝文データ照合装置
21日前
キヤノン株式会社
自律移動体制御システム
1か月前
オムロン株式会社
IOターミナル
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ