TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132134
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029498
出願日
2024-02-29
発明の名称
自動走行車両
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
G05D
1/243 20240101AFI20250903BHJP(制御;調整)
要約
【課題】走行路又はその周辺に配置したランドマークを画像認識することで、より正確に自己位置の推定をすることができる自動走行車両を提供する。
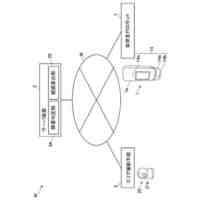
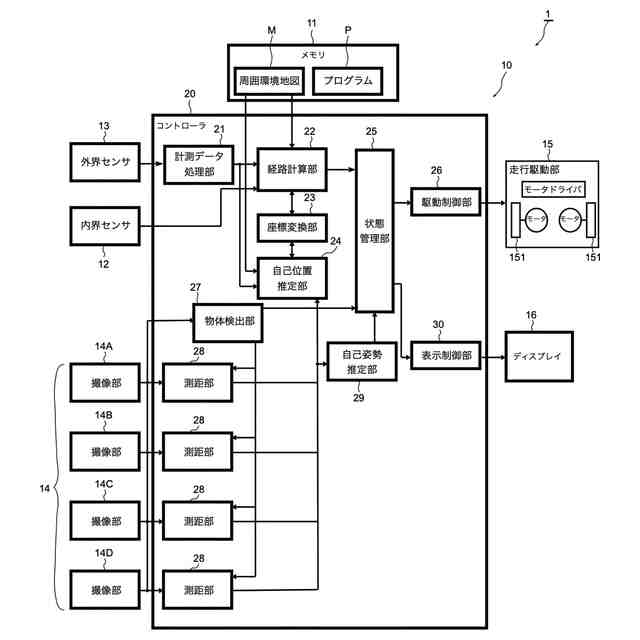
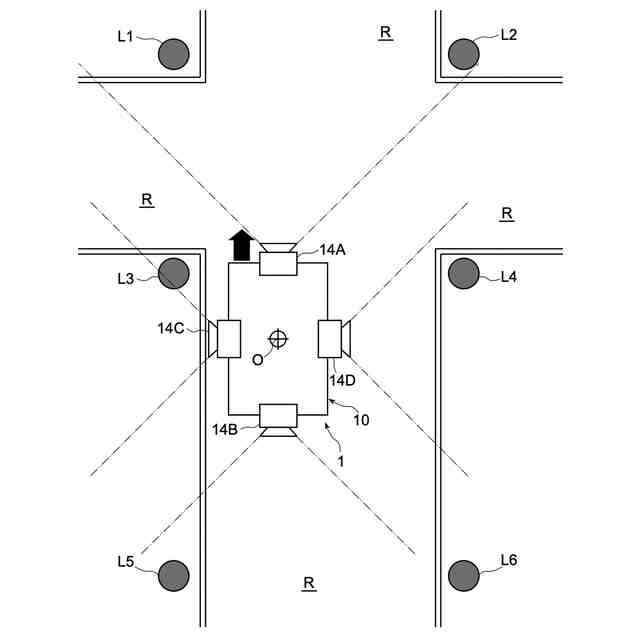
【解決手段】ランドマークLの画像情報を含む識別情報と共に周囲環境地図M上の位置情報を記憶しておき、車両本体10(自車両)に搭載した撮像部14でランドマークLを撮影することで、画像情報に基づきランドマークLを個別に識別し、深度情報で車両本体10からランドマークLまでの距離を算出して、周囲環境地図M上において推定される車両本体10の自己位置を補正することで、補正後の自己位置を用いてより正確な走行路Rを得ることができる自動走行車両1を提供する。
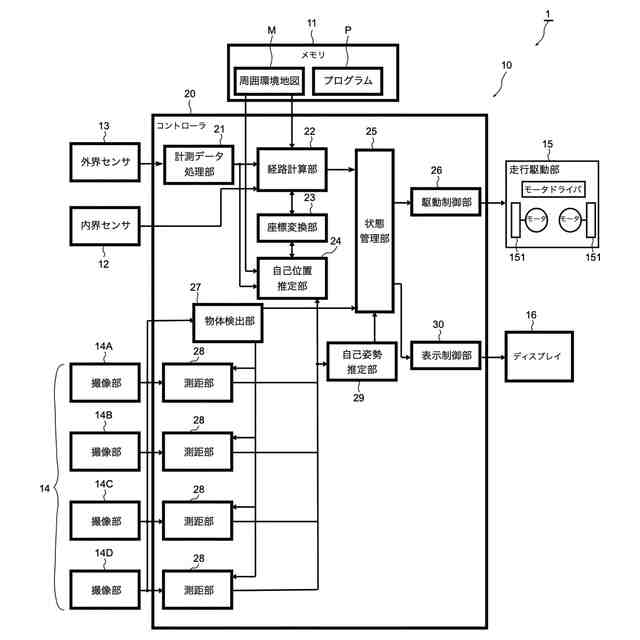
【選択図】図2
特許請求の範囲
【請求項1】
自車両が走行可能な走行路の位置座標と、当該走行路又はその周辺に配置された複数のランドマークの識別情報及び位置情報とが記録された周囲環境地図を利用し、
前記周囲環境地図上における前記自車両の位置である自己位置に基づいて決定される走行経路に従って前記自車両の走行を制御する走行制御部と、
前記走行制御部から出力される情報に従って前記自車両の走行を駆動する走行駆動部とを有する自動走行可能な車両であって、
前記走行制御部を、前記周囲環境地図に基づいて前記自己位置を推定する自己位置推定部と、推定された前記自己位置に基づいて前記自車両の前記走行経路を算出する経路計算部と、算出された前記走行経路に基づいて前記自車両の駆動を制御する駆動制御情報を生成して前記走行駆動部に出力する駆動制御部と、前記自車両の周囲に存在する物体の色情報及び深度情報を含む画像を撮影する撮像部と、前記撮像部で撮影した前記物体と前記自車両との距離を前記深度情報に基づいて測定し距離情報を算出する測距部とを設けるものとし、
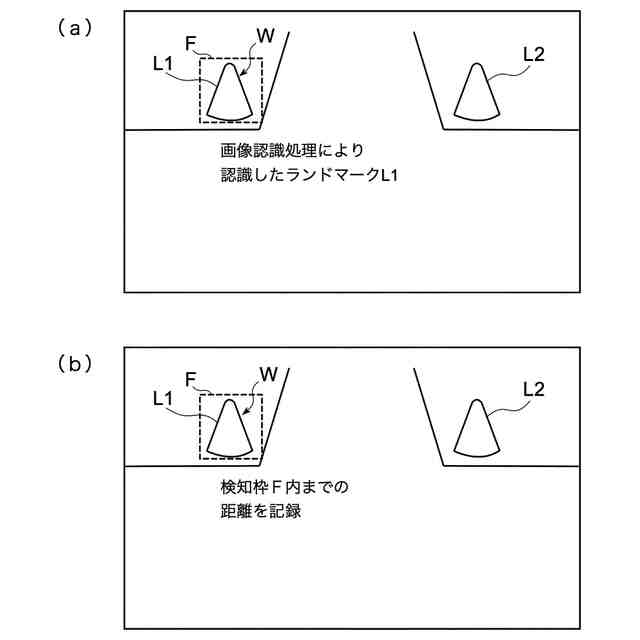
前記自己位置推定部において、推定された前記自己位置を、前記撮像部で撮影した前記ランドマークの前記色情報に基づいて何れの前記ランドマークであるかを特定するとともに、特定された当該ランドマークと前記自車両との距離情報に基づいて補正し、補正後の自己位置を前記経路計算部に出力するように構成していることを特徴とする自動走行車両。
続きを表示(約 820 文字)
【請求項2】
前記複数の撮像部でそれぞれ異なる前記ランドマークを撮影し、
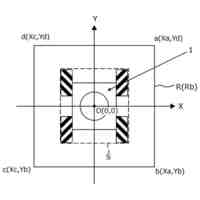
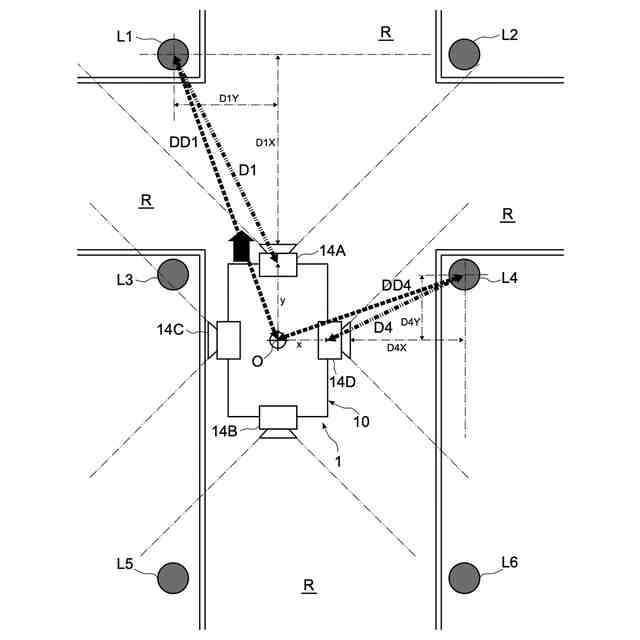
前記測距部において測定した前記各撮像部から前記各ランドマークまでの距離と、前記自車両の中心位置に対する前記各撮像部の距離を含む配置位置情報を利用して、前記自車両の中心位置から前記各ランドマークまでの距離に換算し距離情報として出力するように構成している請求項1に記載の自動走行車両。
【請求項3】
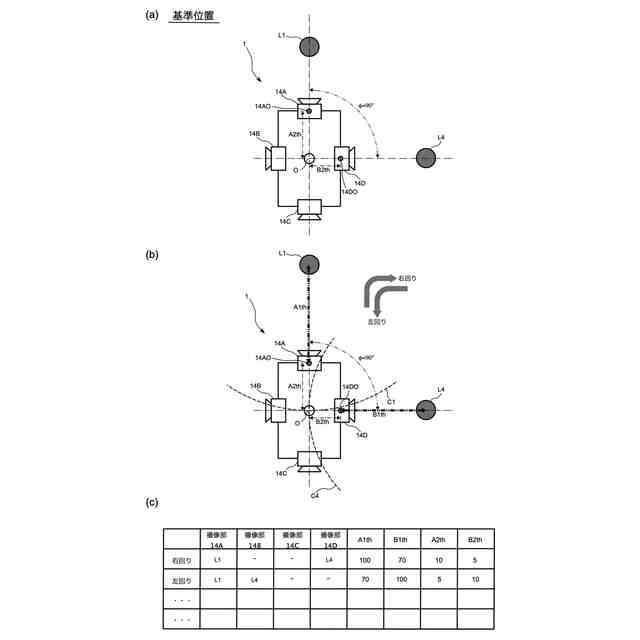
前記自車両の前方を撮影する前記撮像部の中心と、前記自車両の一側方を撮影する前記撮像部の中心とを、前記自車両の中心位置を通る直交する二直線上に配置し、当該二直線上にそれぞれ異なる前記ランドマークが同時に位置付けられる配置状態を基準位置とし、
前記自己位置推定部において、前記各撮像部から前記各ランドマークまでの距離に基づいて前記周囲環境地図上における当該撮像部の中心を算出し、前記各撮像部から前記各ランドマークまでの距離と前記自車両の中心位置から前記各撮像部の中心までの距離の和と所定の補正値とに基づいて前記自車両の中心位置から前記各ランドマークまでの距離を算出する請求項2に記載の自動走行車両。
【請求項4】
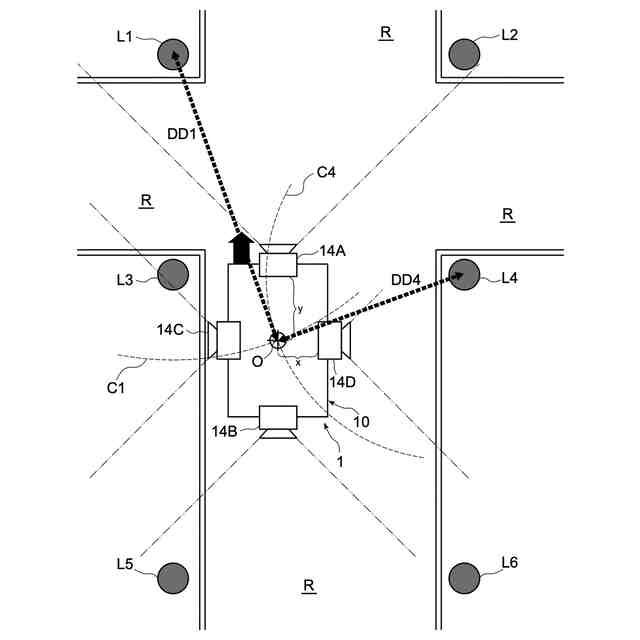
前記自己位置推定部において、前記各ランドマークを中心とし、前記自車両の中心位置から前記各ランドマークまでの距離を半径とする円弧同士の交点を、前記周囲環境地図上における補正後の前記自己位置として推定する請求項3に記載の自動走行車両。
【請求項5】
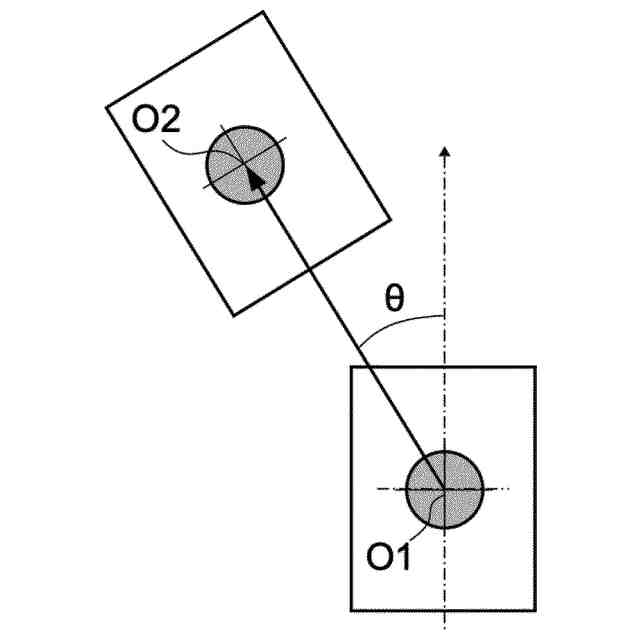
前記走行制御部に、前記自己位置推定部において今回推定された補正後の前記自己位置と前回推定した補正後の前記自己位置の差分に基づき、前記自車両の推定姿勢を算出する自己姿勢推定部を設け、
前記駆動制御部において、算出された前記走行路と前記推定姿勢に基づいて前記駆動制御情報を生成するように構成している請求項1乃至4の何れかに記載の自動走行車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動搬送車(AGV:Automatic Guides Vehicle)や自律走行ロボット(AMR:Autonomous Mobile Robot)等の自動走行車両に関するものである。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
EC(electronic commerce)の普及・拡大を背景に近年は荷物数が急増しており、また、物流や工場等での物品の集配の無人化・自動化も進んでいることも要因となり、自動搬送車(無人搬送車ともいわれる)や自律走行ロボット等の自動走行車両が普及してきている。今後も自動走行車両の導入は増加し続けることが想定されている。
【0003】
自動走行車両(特にAGV)では一般に、磁気テープを誘導体として走行路に敷設する「磁気誘導・ライントレース式」や、2次元バーコードを誘導体として走行路に設置する「ランドマーク(シール)式」の2種類が、AGVの誘導方式として採用されてきた。AGVでは、これらの誘導体に従って一定の領域内における固定ルートを自動走行し、荷物等の搬送が行われている。磁気誘導・ライントレース式の誘導方式では、AGVの自己位置が明確になる反面、磁気テープの敷設工事が必須となることに加えて、経路変更が容易にできないことが不利となっている。また、ランドマーク(シール)式の誘導方式では、2次元コードが汚れてしまうと、AGVが自己位置を認識できなくなるため、安全のために固定ルートが設定された領域内でのAGVと人の動作領域を明確に分離する必要があり、ルートのレイアウト設計に制約が生じる点が不利となっている。
【0004】
また、自動走行車両では、上記のような磁気テープや2次元バーコードを用いず、LiDAR(Light Detection AND Ranging / Laser imaging Detection AND Ranging)を用いたレーザーSLAM(Simultaneous Localization and Mapping)方式(以下、「SLAM方式」という)の採用が増加してきている。SLAM方式では、車両に搭載されたホイールオドメトリやIMU(Internal Measurement Unit:慣性計測ユニット)等の内界センサにより車両の運動状況を計測・把握して、測距センサ(LiDAR等)の外界センサにより、走行中に周囲の環境をセンシングして得られた情報と、事前に作成されて記憶されている周囲環境地図を突き合わせることで、実環境における車両の自己位置を算出して補正することもなされている(特許文献1参照)。
【0005】
また、AMRは、車両に搭載されたセンサ等から得た情報により自己位置を推定することで自律走行可能とされたものである。AMRには、走行ルートに人や物品等の障害物をセンサ等で検知すると、それを回避したり減速したりして対処する機能を有するものもある(特許文献2参照)。
【先行技術文献】
【特許文献】
【0006】
特願2022-122830号出願明細書
特開2019-070952号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、例えば、物流倉庫のように、荷物を積んだ状態のパレット(例えば、平パレットに荷物を積載した状態や、メッシュパレットに荷物を収納した状態)を走行路以外のエリアに平置きして頻繁に搬入出する環境では、平置きするスペースを確保するために、周囲環境の特徴(柱や壁といった走行路における特徴や、特定の位置を認識するためのランドマーク等)が少ない場合がある。この場合、磁気テープや2次元バーコード等の誘導体の設置は有効であるが、上述したような不利な点を考慮すると、特定エリアへ自由に搬入出する際の経路や固定ルートの変更が容易でないので、自動走行車両の運用は難しい。また、上述したSLAM方式では、自己位置を推定するために、周囲環境の特徴がある程度必要であり、パレットが頻繁に搬入出されると、事前に作成され記憶されている周囲環境地図と走行中にセンシングして得られた情報が異なるため、車両の自己位置を精度良く推定することが困難である。さらに、屋外環境においては、GPSを使った自己位置の推定に加えて、障害物をセンシングして補正した自己位置の推定を重ねると、正確な自己位置の推定に誤差が積み重なるという問題も考えられる。
【0008】
本発明は、このような課題に着目してなされたものであって、主たる目的は、自動走行車両の自己位置を推定する際、周囲環境の特徴が少ない場合において、高精度に自己位置を推定して走行させることができる自動走行車両を提供しようとするものである。
【課題を解決するための手段】
【0009】
すなわち、本発明に係る自動走行車両は、自車両の走行可能な走行路の位置座標と、走行路又はその周辺に配置された複数のランドマークの識別情報及び位置情報とが記録された周囲環境地図を利用し、周囲環境地図上における自車両の位置である自己位置に基づいて決定される走行経路に従って自車両の走行を制御する走行制御部と、走行制御部から出力される情報に従って自車両の走行を駆動する走行駆動部とを有するものである。走行制御部には、周囲環境地図に基づいて自己位置を推定する自己位置推定部と、推定された自己位置に基づいて自車両の走行経路を算出する経路計算部と、算出された走行経路に基づいて自車両の駆動を制御する駆動制御情報を生成して走行駆動部に出力する駆動制御部とを設けている。さらに本発明の自動走行車両には、自車両の周囲に存在する物体の色情報及び深度情報を含む画像を撮影する撮像部と、撮像部で撮影した物体と自車両との距離を測定し距離情報を算出する測距部とを設けており、自己位置推定部において、推定された自己位置を、撮像部で撮影したランドマークの画像の色情報に基づいて何れのランドマークであるかを特定するとともに、この特定されたランドマークと自車両との距離情報に基づいて補正し、補正後の自己位置を経路計算部に出力するように構成している。
【0010】
このような自動走行車両であれば、事前に得られている周囲環境地図と走行時に得られる情報の突き合わせによって自動走行車両の自己位置を推定するだけでなく、深度情報も得られる撮像部によって走行路又はその周辺に配置されたランドマークを撮影し、そのランドマークから自車両までの距離を測定するとともに、その距離情報と撮影したランドマークの画像から特定した周囲環境地図上のランドマークの位置とから自己位置を補正するため、設置したランドマーク以外に周囲環境の特徴が少ない場合であっても、より正確に自己位置を推定でき、安全で確実な走行が可能なAGVやAMRのような自動走行車両を提供できることになる。なお、ランドマークとしては、設置や移動が容易な三角錐状のロードコーンや円柱状のポール等の立体物を利用することが望ましいが、二次元バーコードやARマーカのような二次元マークを利用する場合であっても、2つ以上の撮像部で常に撮影できる状態において複数の二次元マークを撮像しその情報に基づいて車両本体の自己位置を推定するように構成することもできる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
28日前
株式会社熊谷組
障害物の検出方法
19日前
愛知製鋼株式会社
車両用システム
2か月前
株式会社FUJI
加工機械ライン
3か月前
ローム株式会社
基準電圧源
1か月前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
17日前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
24日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
生産管理システム
2か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン株式会社
配送システム
1か月前
マーク ヘイリー
消防ロボット
3か月前
カヤバ株式会社
減圧弁
26日前
エイブリック株式会社
電流補償回路及び半導体装置
13日前
トヨタ自動車株式会社
クラッチペダル
2か月前
トヨタ自動車株式会社
制御装置
28日前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
株式会社CAOS
移動体の制御システム
1か月前
日野自動車株式会社
自動運転装置
18日前
株式会社アマダ
工作機械制御装置
18日前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
村田機械株式会社
搬送車システム
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ