TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025138412
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024037491
出願日
2024-03-11
発明の名称
運搬車
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
G05D
1/247 20240101AFI20250917BHJP(制御;調整)
要約
【課題】ユーザの位置を精度よく算出することができる技術を提供する。
【解決手段】本明細書が開示する運搬車は、車体ユニットと、車体ユニットに支持されており、地面に接地する接地部と、接地部を駆動する原動機と、第1アンテナと、第1アンテナとは異なる第2アンテナと、を有しており、ユーザが携帯するUWBタグからのビーコン信号を受信する第1UWBアンカーと、第1UWBアンカーと前後方向の位置が異なっており、UWBタグからのビーコン信号を受信する第2UWBアンカーと、原動機を駆動させて、UWBタグを追従して移動する追従運転を実行可能な制御ユニットと、を備えている。制御ユニットは、第1アンテナによって受信されるビーコン信号と、第2アンテナによって受信されるビーコン信号と、を利用して、第1UWBアンカーとUWBタグとの間の第1距離と、第1UWBアンカーに対するUWBタグの第1タグ角度と、を算出する。
【選択図】図11
特許請求の範囲
【請求項1】
運搬車であって、
車体ユニットと、
前記車体ユニットに支持されており、地面に接地する接地部と、
前記接地部を駆動する原動機と、
第1アンテナと、前記第1アンテナとは異なる第2アンテナと、を有しており、ユーザが携帯するUWBタグからのビーコン信号を受信する第1UWBアンカーと、
前記第1UWBアンカーと前後方向の位置が異なっており、前記UWBタグからの前記ビーコン信号を受信する第2UWBアンカーと、
前記原動機を駆動させて、前記UWBタグを追従して移動する追従運転を実行可能な制御ユニットと、を備え、
前記制御ユニットは、
前記第1アンテナによって受信される前記ビーコン信号と、前記第2アンテナによって受信される前記ビーコン信号と、を利用して、前記第1UWBアンカーと前記UWBタグとの間の第1距離と、前記第1UWBアンカーに対する前記UWBタグの第1タグ角度と、を算出する、
運搬車。
続きを表示(約 1,400 文字)
【請求項2】
前記制御ユニットは、
前記第2UWBアンカーによって受信される前記ビーコン信号を利用して、前記第2UWBアンカーと前記UWBタグとの間の第2距離を算出し、
前記第1距離と前記第2距離とを利用して、前記UWBタグが、第1エリアと、前記第1エリアとは異なる第2エリアと、のいずれのエリアに位置するのかを判定する、
請求項1に記載の運搬車。
【請求項3】
前記第1UWBアンカーは、前記第2UWBアンカーよりも前側に配置されており、
前記第1アンテナと前記第2アンテナは左右方向に並んでおり、
前記左右方向において、前記第1アンテナと前記第2アンテナとの間の中点と、前記第2UWBアンカーの中心の位置は一致しており、
前記制御ユニットは、
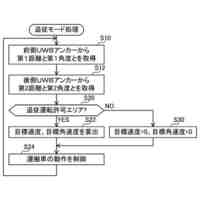
前記第1UWBアンカーと前記UWBタグとを結んだ第1仮想線と、前記第1UWBアンカーと前記第2UWBアンカーを結んだ第2仮想線と、の間の第2タグ角度が鈍角となる場合に、前記UWBタグが前記第1エリアに位置していると判定し、
前記第2タグ角度が90°又は鋭角となる場合に、前記UWBタグが前記第2エリアに位置していると判定する、請求項2に記載の運搬車。
【請求項4】
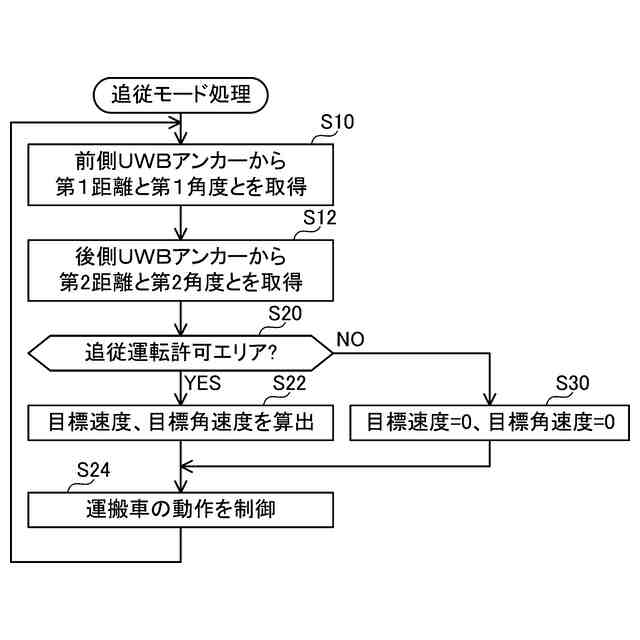
前記第1エリアは、前記追従運転の実行が許可される追従運転許可エリアであり、
前記第2エリアは、前記追従運転の実行が禁止される追従運転禁止エリアである、請求項2又は3に記載の運搬車。
【請求項5】
前記制御ユニットは、
前記UWBタグが前記追従運転許可エリアに位置していると判定する場合に、前記第1距離と前記第1タグ角度とを利用して、目標速度、及び、目標角速度を算出して、前記原動機の動作を制御する、請求項4に記載の運搬車。
【請求項6】
前記制御ユニットは、
前記UWBタグが前記追従運転許可エリアから前記追従運転禁止エリアに移動したと判定する場合に、前記原動機の動作を停止させ、
前記UWBタグが前記追従運転禁止エリアから前記追従運転許可エリアに移動したと判定する場合に、前記原動機を駆動させる、請求項5に記載の運搬車。
【請求項7】
前記第1UWBアンカーは、前方側から到来する信号に対する受信感度が、後方側から到来する信号に対する受信感度よりも高い、請求項1から6のいずれか一項に記載の運搬車。
【請求項8】
前記車体ユニットに支持されている荷台をさらに備え、
前記第1UWBアンカーと前記第2UWBアンカーとのうち前側に位置する前側UWBアンカーは、前記荷台よりも前側に配置されている、請求項1から7のいずれか一項に記載の運搬車。
【請求項9】
前記第1UWBアンカーと前記第2UWBアンカーとのうち後側に位置する後側UWBアンカーは、前記荷台よりも後側に配置されており、
前記後側UWBアンカーは、前記前側UWBアンカー、及び、前記荷台よりも上方に位置している、請求項8に記載の運搬車。
【請求項10】
前記ユーザが把持するグリップ部を有するハンドルをさらに備え、
前記ハンドルは、前記荷台よりも上方に配置されており、
前記後側UWBアンカーは、前記ハンドルに設けられている、請求項9に記載の運搬車。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、運搬車に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、運搬車が開示されている。この運搬車は、車体ユニットと、車体ユニットに支持されており、地面に接地する接地部と、接地部を駆動する原動機と、ユーザが携帯するタグからのビーコン信号を受信するアンカーと、原動機を駆動させて、タグを追従して移動する追従運転を実行可能な制御ユニットと、を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2023-13129号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
追従運転を実行可能な運搬車においては、タグの位置、即ち、ユーザの位置を精度よく算出することが望まれている。本明細書では、ユーザの位置を精度よく算出することができる技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する運搬車は、車体ユニットと、前記車体ユニットに支持されており、地面に接地する接地部と、前記接地部を駆動する原動機と、第1アンテナと、前記第1アンテナとは異なる第2アンテナと、を有しており、ユーザが携帯するUWBタグからのビーコン信号を受信する第1UWBアンカーと、前記第1UWBアンカーと前後方向の位置が異なっており、前記UWBタグからの前記ビーコン信号を受信する第2UWBアンカーと、前記原動機を駆動させて、前記UWBタグを追従して移動する追従運転を実行可能な制御ユニットと、を備えてもよい。前記制御ユニットは、前記第1アンテナによって受信される前記ビーコン信号と、前記第2アンテナによって受信される前記ビーコン信号と、を利用して、前記第1UWBアンカーと前記UWBタグとの間の第1距離と、前記第1UWBアンカーに対する前記UWBタグの第1タグ角度と、を算出してもよい。
【0006】
上記の構成によると、前後方向の位置が異なる第1UWBアンカーと第2UWBアンカーとを利用することによって、UWBタグの位置、即ち、ユーザの位置を精度よく算出することができる。
【図面の簡単な説明】
【0007】
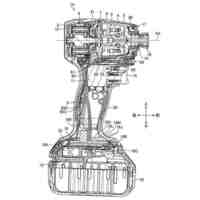
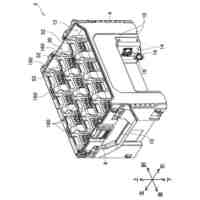
実施例に係る運搬車2を右方上方前方から見た斜視図である。
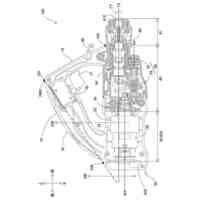
実施例に係る運搬車2の左面図である。
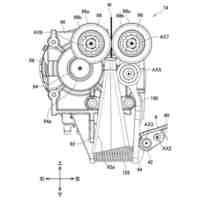
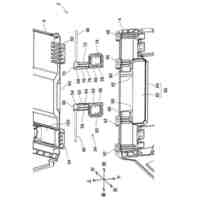
実施例に係る車体ユニット4を右方上方前方から見た斜視図である。
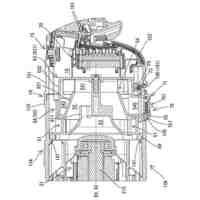
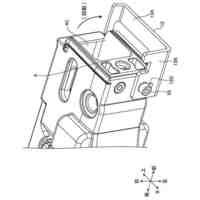
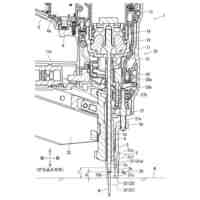
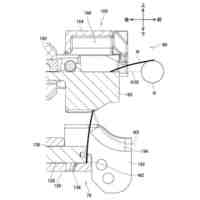
実施例に係る右前過積載検知機構26Aを右方上方前方から見た断面図である。
実施例に係る運搬車2の制御構成を示す図である。
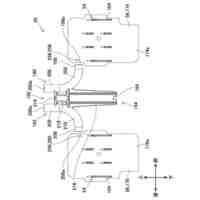
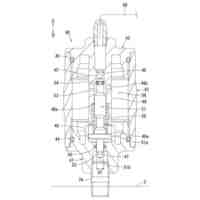
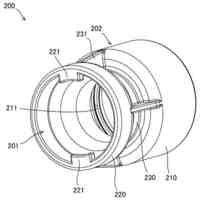
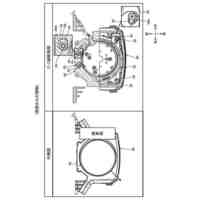
実施例に係るハウジング72の右断面図である。
実施例に係る前側UWBアンカー78の前面図である。
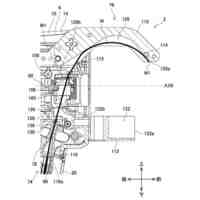
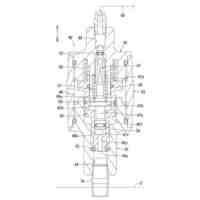
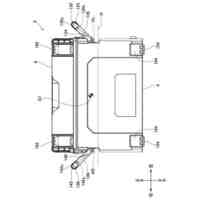
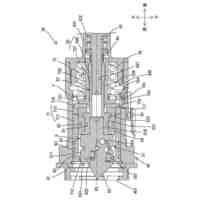
実施例に係る中央スイッチボックス98の前断面図である。
実施例に係る中央スイッチボックス98の右断面図である。
実施例に係る後側UWBアンカー108の前面図である。
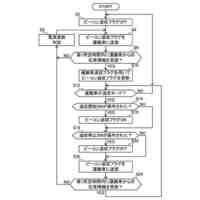
実施例に係る追従モード処理のフローチャート図である。
UWBタグ200が追従運転許可エリアに位置している状況を示す図である。
UWBタグ200が追従運転禁止エリアに位置している場合のビーコン信号の伝送経路を示す図である。
UWBタグ200が追従運転禁止エリアに位置している状況を示す図である。
参考例1に係る運搬車302の模式図である。
参考例1に係る追従モード処理のフローチャート図である。
参考例1において、UWBタグ200と電波強度との関係を示す模式図である。
参考例2に係る運搬車402の模式図である。
参考例2に係る追従モード処理のフローチャート図である。
参考例2において、UWBタグ200が運搬車402よりも右側に位置している状況を示す図である。
参考例2において、UWBタグ200が運搬車402よりも左側に位置している状況を示す図である。
【発明を実施するための形態】
【0008】
以下では、本発明の代表的かつ非限定的な具体例について、図面を参照して詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、以下に開示される追加的な特徴ならびに発明は、さらに改善された運搬車、その製造方法及び使用方法を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、上記及び下記の代表的な具体例の様々な特徴、ならびに、独立及び従属クレームに記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又はクレームに記載された特徴の構成とは別に、出願当初の開示ならびにクレームされた特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびにクレームされた特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社マキタ
運搬車
4日前
株式会社マキタ
運搬車
4日前
株式会社マキタ
充電器
1か月前
株式会社マキタ
電気機器
2か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
19日前
株式会社マキタ
電動工具
19日前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
鉄筋結束機
2か月前
株式会社マキタ
鉄筋結束機
2か月前
株式会社マキタ
背負式ブロワ
2か月前
株式会社マキタ
金工用切断機
10日前
株式会社マキタ
ソーチェーン
4日前
株式会社マキタ
運搬システム
4日前
株式会社マキタ
レシプロソー
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
3日前
株式会社マキタ
フレア形成工具
2か月前
株式会社マキタ
エアコンプレッサ
1か月前
株式会社マキタ
携帯用バンドソー
2か月前
株式会社マキタ
エアコンプレッサ
1か月前
株式会社マキタ
エアコンプレッサ
1か月前
株式会社マキタ
エアコンプレッサ
1か月前
株式会社マキタ
電動式打ち込み工具
1か月前
株式会社マキタ
電気機器およびケース
2か月前
株式会社マキタ
コネクタおよび加工機
28日前
株式会社マキタ
バイス及びレシプロソー
1か月前
株式会社マキタ
鉄筋結束機および結束方法
2か月前
株式会社マキタ
電気機器および運搬ケース
2か月前
株式会社マキタ
電気機器および運搬ケース
2か月前
株式会社マキタ
除雪機およびアタッチメント
1か月前
株式会社マキタ
作業機およびアタッチメント
1か月前
株式会社マキタ
検出装置及びロボット集塵機
1か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ