TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131398
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024029116
出願日
2024-02-28
発明の名称
移動体の制御システム
出願人
株式会社CAOS
代理人
個人
,
個人
主分類
G05D
1/249 20240101AFI20250902BHJP(制御;調整)
要約
【課題】移動体を効率的に移動可能とする移動体の制御システムを提供する。
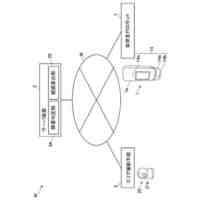
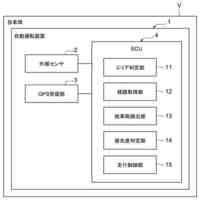
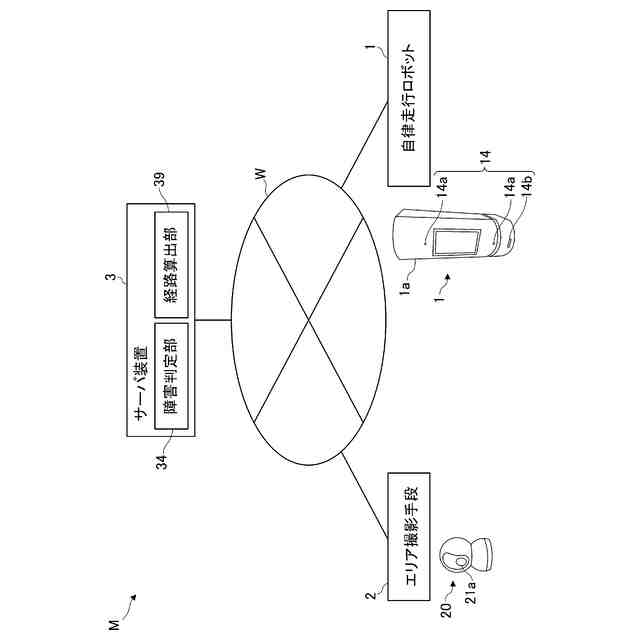
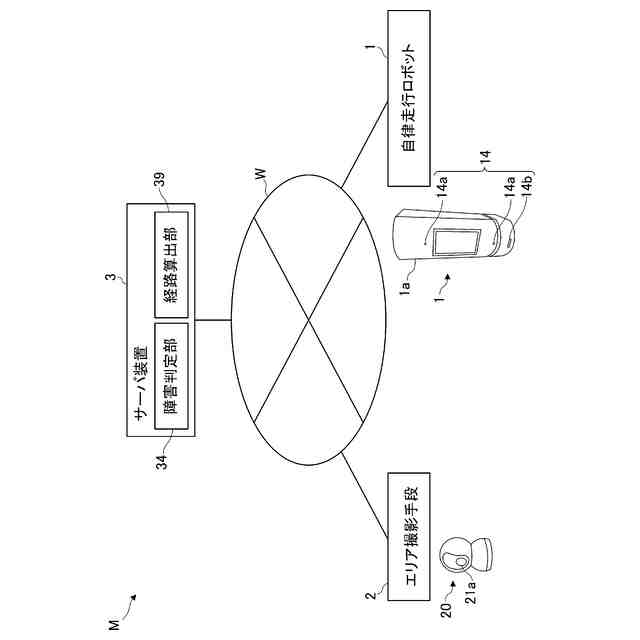
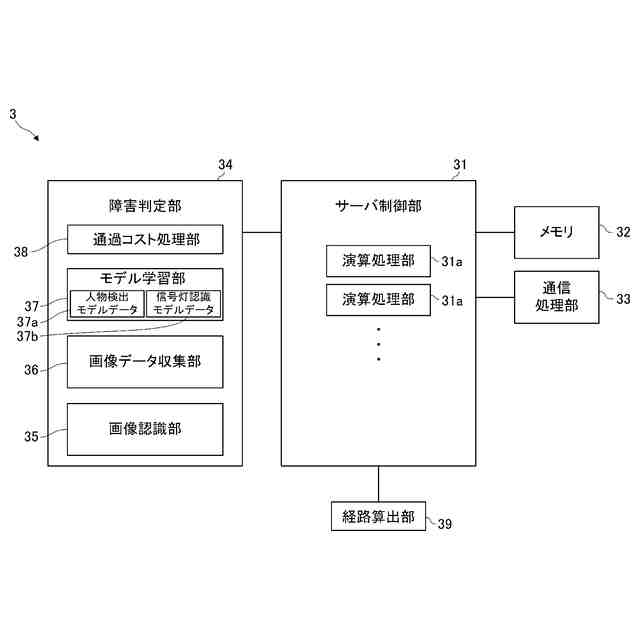
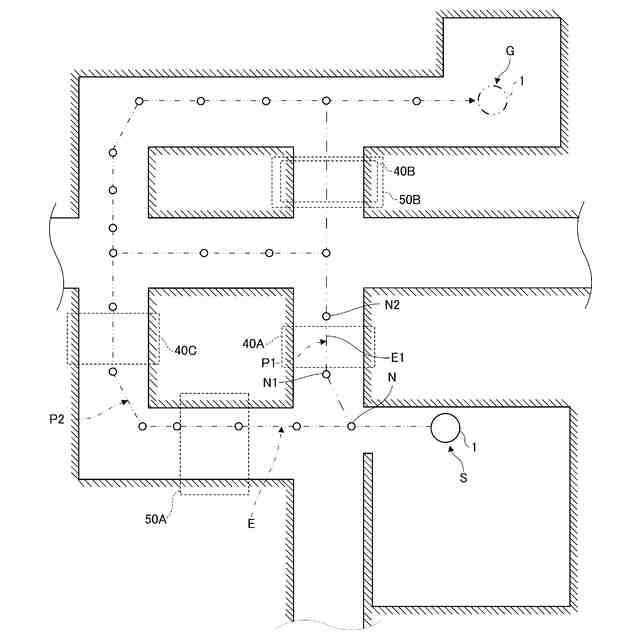
【解決手段】自律走行可能な移動体と、前記移動体の現在地から目的地までの移動経路に設定された人物検知エリアを撮影可能に設けられた人物検知カメラを含むエリア撮影手段と、前記人物検知エリア内に人物を検知するための人物識別領域を設定するとともに、前記エリア撮影手段で撮影された撮影データから前記人物識別領域内の人物検知人数を算出し、前記人物識別領域に設定されたしきい値と比較して、前記人物検知人数が前記しきい値以上である場合に、前記移動経路に設定された通過コストを上昇させる処理を行うサーバ装置と、を含み、前記サーバ装置は、前記通過コストが最小値となるように前記移動体の前記移動経路を算出する、ものである。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行可能な移動体と、
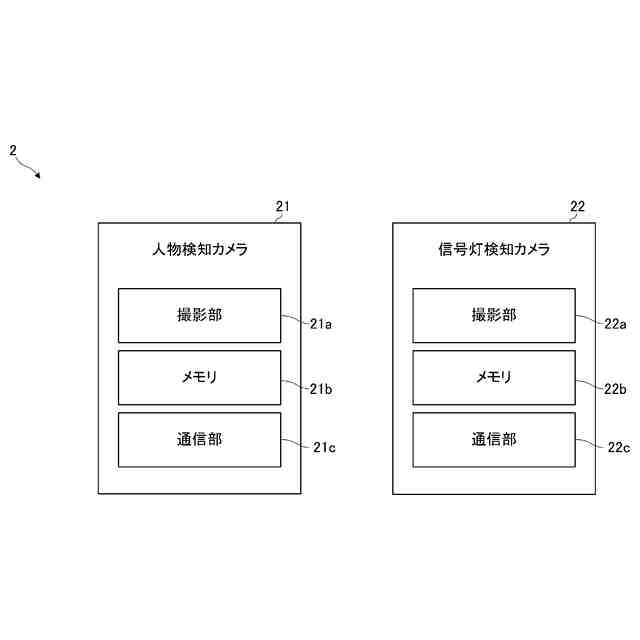
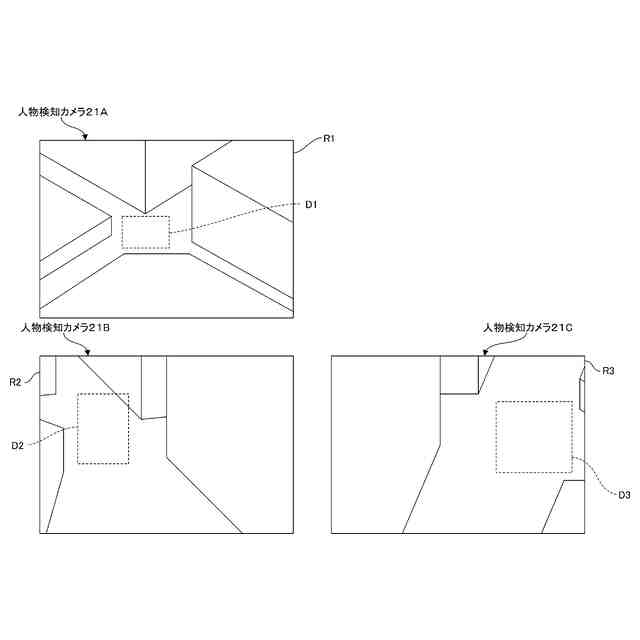
前記移動体の現在地から目的地までの移動経路に設定された人物検知エリアを撮影可能に設けられた人物検知カメラを含むエリア撮影手段と、
前記人物検知エリア内に人物を検知するための人物識別領域を設定するとともに、前記エリア撮影手段で撮影された撮影データから前記人物識別領域内の人物検知人数を算出し、前記人物識別領域に設定されたしきい値と比較して、前記人物検知人数が前記しきい値以上である場合に、前記移動経路に設定された通過コストを上昇させる処理を行うサーバ装置と、
を含み、
前記サーバ装置は、前記通過コストが最小値となるように前記移動体の前記移動経路を算出することを特徴とする移動体の制御システム。
続きを表示(約 640 文字)
【請求項2】
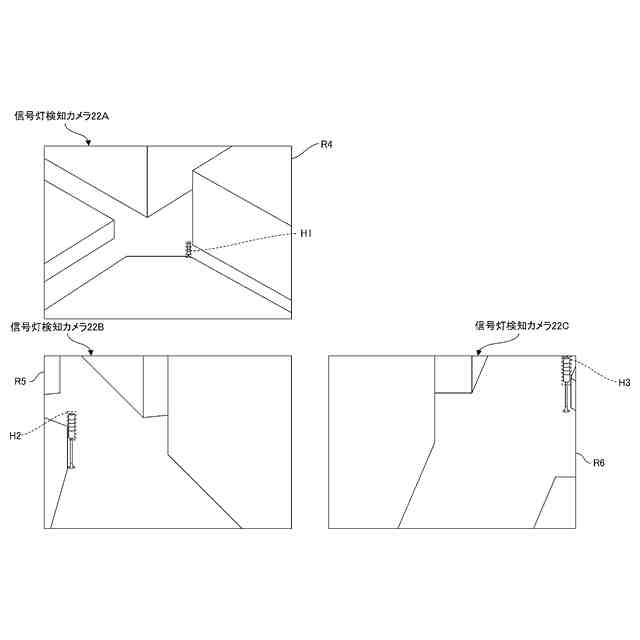
前記エリア撮影手段は、信号灯検知カメラを含み、
前記信号灯検知カメラは、前記移動経路に設定した信号灯検知エリア内に設けた信号灯の点灯パターンを撮影可能に設けられ、
前記サーバ装置は、
前記信号灯検知エリア内に前記信号灯の点灯パターンを検知するための点灯識別領域を設定するとともに、前記信号灯検知カメラで撮影された撮影データから前記点灯識別領域内の前記信号灯の点灯パターンを検出し、前記点灯識別領域に設定された前記信号灯の点灯パターンが通常とは異なる点灯パターンで点灯していると判定した場合に、前記信号灯検知エリアを通過する前記移動経路に設定された通過コストを上昇させる処理を行いつつ、前記通過コストが最小値となるように前記移動体の前記移動経路を算出することを特徴とする請求項1に記載の移動体の制御システム。
【請求項3】
前記サーバ装置は、
前記自律走行ロボットが前記人物検知エリアに進入した時点において、前記人物識別領域で検知された人物検知人数に応じて、前記人物検知エリアを通過する前記自律走行ロボットの動作を制御する、
または、
前記自律走行ロボットが前記信号灯検知エリアに進入した時点において、前記点灯識別領域で検知された前記信号灯の点灯パターンに応じて、前記人物検知エリアを通過する前記自律走行ロボットの動作を制御する
ことを特徴とする請求項2に記載の移動体の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工場内を自由に移動可能とする移動体の制御システムに関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
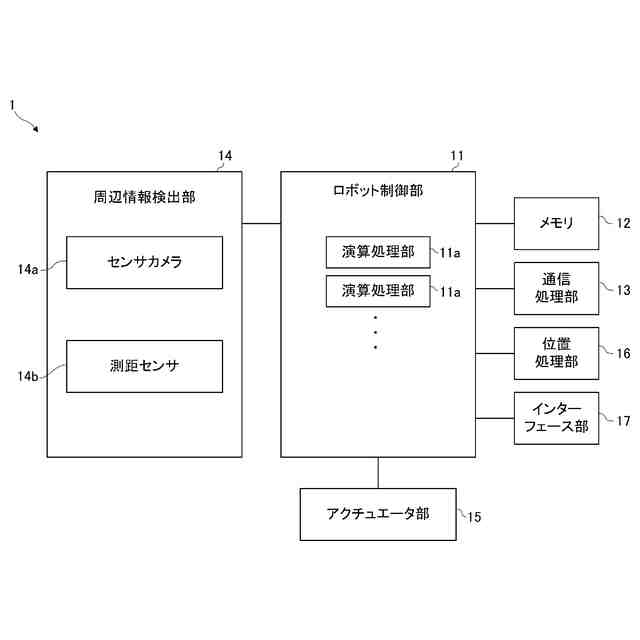
従来、広大な工場エリア内を磁気テープなどの移動ガイドを用いることなく自由に移動可能に構成された移動体としての自律走行ロボット(以下、単にロボットとも称する。)がある。自律走行ロボットは、工場内で協働する作業員の作業を阻害することなく自由な経路で目的地まで物を搬送するものである。自律走行ロボットは、ロボット周囲の障害物を検出するためのセンシング機能を有し、このセンシング機能によって障害物に接触することなく目的地まで移動することができる。
【0003】
例えば、特許文献1に記載の自律走行ロボットは、レーザセンサや、カメラなどの認識センサを有するセンサ装置を備えた構成が記載されている。このような構成により、特許文献1に記載の自律走行ロボットは、障害物に接触することなく目的地まで移動することができる。
【先行技術文献】
【特許文献】
【0004】
特開2018-156243号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の自律走行ロボットは、ロボットに備えたセンシング機能で障害物を検知することにより、広大な工場内を立体物(人物や構造物)と接触することなく自由に移動することができる。しかしながら、自律走行ロボットに予め備えられたセンサ装置によるセンシング機能では、ロボット周囲の立体物しか確認することができず、ロボットが通行しようとする経路において、作業員が密集して通行が困難となる経路が存在する場合、その密集地点に到達して通行できないことが判明してから初めて別の経路を選定する、または、その地点の密集状態が解消されてから走行を再開することとなり、自律走行ロボットが最適に移動できない虞があった。
【0006】
本発明は、上述の問題に鑑みてなされたものであり、移動体を効率的に移動可能とする移動体の制御システムを提供することを目的としている。
【課題を解決するための手段】
【0007】
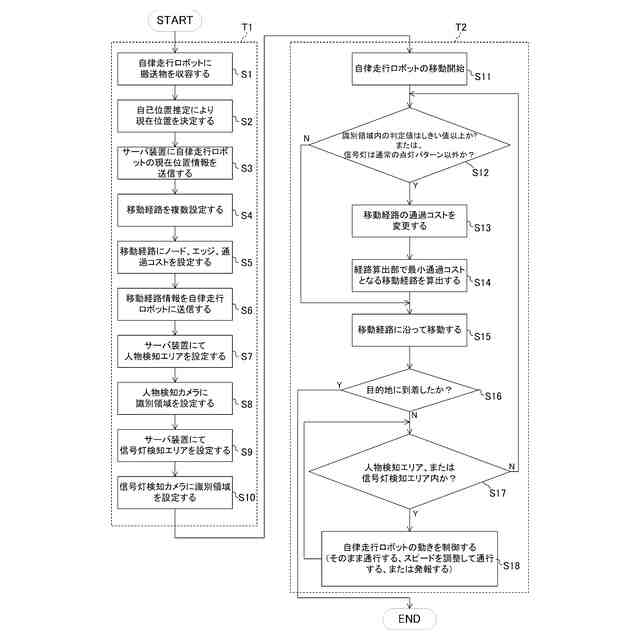
本発明の第1の態様は、自律走行可能な移動体と、前記移動体の現在地から目的地までの移動経路に設定された人物検知エリアを撮影可能に設けられた人物検知カメラを含むエリア撮影手段と、前記人物検知エリア内に人物を検知するための人物識別領域を設定するとともに、前記エリア撮影手段で撮影された撮影データから前記人物識別領域内の人物検知人数を算出し、前記人物識別領域に設定されたしきい値と比較して、前記人物検知人数が前記しきい値以上である場合に、前記移動経路に設定された通過コストを上昇させる処理を行うサーバ装置と、を含み、前記サーバ装置は、前記通過コストが最小値となるように前記移動体の前記移動経路を算出することを特徴とする、ものである。
【0008】
本発明の第2の態様によれば、前記エリア撮影手段は、信号灯検知カメラを含み、前記信号灯検知カメラは、前記移動経路に設定した信号灯検知エリア内に設けた信号灯の点灯パターンを撮影可能に設けられ、前記サーバ装置は、前記信号灯検知エリア内に前記信号灯の点灯パターンを検知するための点灯識別領域を設定するとともに、前記信号灯検知カメラで撮影された撮影データから前記点灯識別領域内の前記信号灯の点灯パターンを検出し、前記点灯識別領域に設定された前記信号灯の点灯パターンが通常とは異なる点灯パターンで点灯していると判定した場合に、前記信号灯検知エリアを通過する前記移動経路に設定された通過コストを上昇させる処理を行いつつ、前記通過コストが最小値となるように前記移動体の前記移動経路を算出することを特徴とする、ものである。
【0009】
本発明の第3の態様によれば、前記サーバ装置は、前記自律走行ロボットが前記人物検知エリアに進入した時点において、前記人物識別領域で検知された人物検知人数に応じて、前記人物検知エリアを通過する前記自律走行ロボットの動作を制御する、または、前記自律走行ロボットが前記信号灯検知エリアに進入した時点において、前記点灯識別領域で検知された前記信号灯の点灯パターンに応じて、前記人物検知エリアを通過する前記自律走行ロボットの動作を制御することを特徴とする、ものである。
【発明の効果】
【0010】
本発明の第1の態様によれば、自律走行可能な移動体と、前記移動体の現在地から目的地までの移動経路に設定された人物検知エリアを撮影可能に設けられた人物検知カメラを含むエリア撮影手段と、前記人物検知エリア内に人物を検知するための人物識別領域を設定するとともに、前記エリア撮影手段で撮影された撮影データから前記人物識別領域内の人物検知人数を算出し、前記人物識別領域に設定されたしきい値と比較して、前記人物検知人数が前記しきい値以上である場合に、前記移動経路に設定された通過コストを上昇させる処理を行うサーバ装置と、を含み、前記サーバ装置は、前記通過コストが最小値となるように前記移動体の前記移動経路を算出する構成により、自律走行可能な移動体が効率的に目的地まで移動することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社CAOS
移動体の制御システム
1か月前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
29日前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
20日前
株式会社FUJI
加工機械ライン
3か月前
ローム株式会社
基準電圧源
1か月前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
18日前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
25日前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
減圧弁
2か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
制御装置
29日前
カヤバ株式会社
減圧弁
27日前
キヤノン株式会社
配送システム
1か月前
株式会社ダイフク
物品搬送設備
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
14日前
トヨタ自動車株式会社
クラッチペダル
2か月前
マーク ヘイリー
消防ロボット
3か月前
村田機械株式会社
搬送車システム
19日前
株式会社アマダ
工作機械制御装置
19日前
日野自動車株式会社
自動運転装置
19日前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
株式会社TMEIC
安全性診断装置
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ