TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151933
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053570
出願日
2024-03-28
発明の名称
搬送車システム
出願人
村田機械株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/693 20240101AFI20251002BHJP(制御;調整)
要約
【課題】搬送効率を低下させずに、経路探索に要する時間を短縮することができる搬送車システムを提供する。
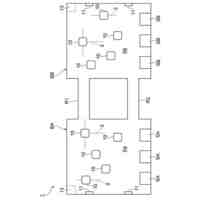
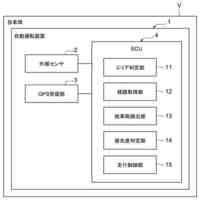
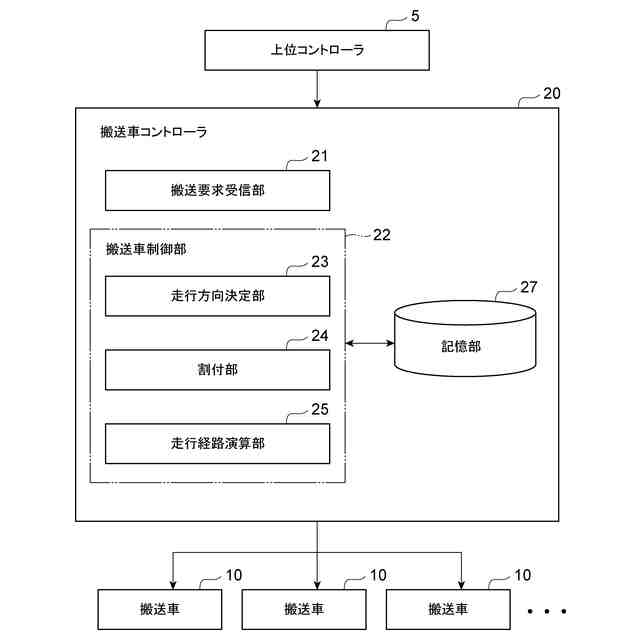
【解決手段】搬送車システム1は、経路2を走行して物品を搬送する搬送車10と、搬送車10を管理する搬送車コントローラ20と、を備える。搬送車コントローラ20は、物品を搬送元から搬送先へと搬送するための搬送要求を記憶する記憶部27と、搬送要求に含まれる搬送元及び搬送先に基づいて、経路2の少なくとも一部の区間における交通量を算出することにより、当該区間における搬送車10の走行方向を決定する走行方向決定部23と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
あらかじめ定められた経路を走行して物品を搬送する搬送車と、
前記搬送車を管理するコントローラと、を備え、
前記コントローラは、
前記物品を搬送元から搬送先へと搬送するための搬送要求を記憶する記憶手段と、
前記搬送要求に含まれる前記搬送元及び前記搬送先に基づいて、前記経路の少なくとも一部の区間における交通量を算出することにより、当該区間における前記搬送車の走行方向を、第1方向、前記第1方向とは反対の第2方向、又は双方向のうちの何れかに決定する走行方向決定手段と、を有する搬送車システム。
続きを表示(約 630 文字)
【請求項2】
前記コントローラは、前記搬送車のすれ違いができない狭路における走行方向を決定する、請求項1に記載の搬送車システム。
【請求項3】
前記コントローラは、前記狭路における走行方向を変更する際、前記狭路に前記搬送車が存在しないことを確認してから前記走行方向を変更する、請求項2に記載の搬送車システム。
【請求項4】
前記コントローラは、前記狭路における走行方向を変更する前に、現在の走行方向を基準として当該狭路の下流側である下流エリアから上流側である上流エリアへの仮の経路探索を実行し、走行経路が存在しない場合は当該狭路における走行方向を双方向に変更する、請求項2に記載の搬送車システム。
【請求項5】
前記コントローラは、前記仮の経路探索を交流量の少ない前記経路から行い、ある狭路において走行方向を双方向に変更した場合は、当該狭路の前記下流エリア及び前記上流エリアの間の前記仮の経路探索は実行しない、請求項4に記載の搬送車システム。
【請求項6】
前記コントローラは、前記搬送車が前記搬送元から前記搬送先へと走行する条件に加え、前記搬送車が待機ポイントから前記搬送元へ走行する条件、前記搬送車が前記搬送先から待機ポイントへ走行する条件、及び、異なる複数の待機ポイント間を走行する条件の少なくとも一つを交通量の算出条件に含める、請求項1~5の何れか一項に記載の搬送車システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送車システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、特許文献1に記載されるように、走行路上を走行する台車に、搬送元から搬送先へと荷物を搬送する搬送要求を処理させる搬送システムが知られている。このシステムでは、搬送コントローラ(搬送制御装置)は、走行区間の通過時間に基づくコストに基づいて複数の経路を評価し、この評価結果から最適な経路を決定する。
【先行技術文献】
【特許文献】
【0003】
特開2003-337623号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来の経路探索方法では、経路の一部において台車同士の競合(例えば、すれ違い困難な通路における衝突など)が生じる状況になると、探索ノード数が急激に増加してしまい、経路探索に要する時間が増大するという問題がある。この問題に対し、その経路の一部に対して走行方向の制約をつける方法も考えられる。しかしそういった制約は、最短距離での搬送ができない時間帯を生じさせてしまう可能性があり、搬送効率の低下につながる。
【0005】
本開示は、搬送効率を低下させずに、経路探索に要する時間を短縮することができる搬送車システムを説明する。
【課題を解決するための手段】
【0006】
[1]本開示の一態様に係る搬送車システムは、あらかじめ定められた経路を走行して物品を搬送する搬送車と、搬送車を管理するコントローラと、を備え、コントローラは、物品を搬送元から搬送先へと搬送するための搬送要求を記憶する記憶手段と、搬送要求に含まれる搬送元及び搬送先に基づいて、経路の少なくとも一部の区間における交通量を算出することにより、当該区間における搬送車の走行方向を、第1方向、第1方向とは反対の第2方向、又は双方向のうちの何れかに決定する走行方向決定手段と、を有する。
【0007】
[1]の搬送車システムによれば、コントローラが、搬送要求に含まれる搬送元及び搬送先に基づいて上記区間における交通量が算出され、走行方向が決められる。これにより、その区間における搬送車の通行台数を増やすことができる。また走行方向の決定により、探索ノード数の増加が抑えられる。よって、搬送効率を低下させずに、経路探索に要する時間を短縮することができる。
【0008】
[2]上記[1]の搬送車システムにおいて、コントローラは、搬送車のすれ違いができない狭路における走行方向を決定してもよい。狭路は、搬送車のすれ違いができないため通行台数に影響しやすい。少なくとも狭路において走行方向の決定を行うことで、走行方向の決定に要する時間を短縮することができる。また、不必要に走行方向に制限をかけることを防ぐこともできる。
【0009】
[3]上記[2]の搬送車システムにおいて、コントローラは、狭路における走行方向を変更する際、狭路に搬送車が存在しないことを確認してから走行方向を変更してもよい。この制御によれば、対面して走行する搬送車同士のデッドロックの発生を防ぐことができる。
【0010】
[4]上記[2]又は[3]の搬送車システムにおいて、コントローラは、狭路における走行方向を変更する前に、現在の走行方向を基準として当該狭路の下流側である下流エリアから上流側である上流エリアへの仮の経路探索を実行し、走行経路が存在しない場合は当該狭路における走行方向を双方向に変更してもよい。この制御によれば走行経路が確保されるので、搬送要求の実行不能状況を防ぐことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
村田機械株式会社
紡績機
6日前
村田機械株式会社
自動倉庫
4日前
村田機械株式会社
自動倉庫
10日前
村田機械株式会社
搬送車システム
4日前
村田機械株式会社
走行車システム
4日前
村田機械株式会社
繊維束の合流方法及び繊維束合流装置
12日前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
14日前
株式会社FUJI
加工機械ライン
2か月前
ローム株式会社
基準電圧源
1か月前
株式会社熊谷組
障害物の検出方法
5日前
愛知製鋼株式会社
車両用システム
1か月前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
3日前
豊田合成株式会社
機器制御装置
10日前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
24日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
キヤノン株式会社
配送システム
1か月前
株式会社ダイフク
物品搬送設備
24日前
マーク ヘイリー
消防ロボット
2か月前
カヤバ株式会社
減圧弁
12日前
トヨタ自動車株式会社
制御装置
14日前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
日野自動車株式会社
自動運転装置
4日前
アズビル株式会社
制御システムおよび制御方法
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ