TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025138413
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024037492
出願日
2024-03-11
発明の名称
運搬車
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
G05D
1/247 20240101AFI20250917BHJP(制御;調整)
要約
【課題】運搬車の追従動作を円滑に進行させることが可能な技術を提供する。
【解決手段】運搬車は、自律的に追従対象に追従する追従動作を実行可能である。運搬車は、車体と、車体に支持されており、地面に接地する車輪と、車輪を駆動する原動機と、運搬車の前進方向に対する追従対象のオフセット角度を検出するオフセット角度検出部と、制御部と、を備える。制御部は、運搬車の追従動作を制御する追従動作制御処理を実行可能に構成されている。追従動作制御処理において、制御部は、オフセット角度が0度を含む第1角度範囲内にある場合、運搬車の追従動作中の旋回度を、オフセット角度に対応する通常旋回度に調整し、オフセット角度が第1角度範囲に隣接する第2角度範囲内にある場合、運搬車の追従動作中の旋回度を、オフセット角度に対応する通常旋回度よりも抑制した抑制旋回度に調整する。
【選択図】図9
特許請求の範囲
【請求項1】
自律的に追従対象に追従する追従動作を実行可能な運搬車であって、
車体と、
前記車体に支持されており、地面に接地する車輪と、
前記車輪を駆動する原動機と、
前記運搬車の前進方向に対する前記追従対象のオフセット角度を検出するオフセット角度検出部と、
制御部と、を備えており、
前記制御部は、前記運搬車の前記追従動作を制御する追従動作制御処理を実行可能に構成されており、
前記追従動作制御処理において、前記制御部は、
前記オフセット角度が0度を含む第1角度範囲内にある場合、前記運搬車の前記追従動作中の旋回度を、前記オフセット角度に対応する通常旋回度に調整し、
前記オフセット角度が前記第1角度範囲に隣接する第2角度範囲内にある場合、前記運搬車の前記追従動作中の前記旋回度を、前記オフセット角度に対応する前記通常旋回度よりも抑制した抑制旋回度に調整する、運搬車。
続きを表示(約 870 文字)
【請求項2】
前記旋回度は、前記運搬車の旋回曲率を含み、
前記追従動作制御処理において、前記制御部は、
前記オフセット角度が前記第1角度範囲内にある場合、前記運搬車の前記追従動作中の前記旋回曲率を、前記オフセット角度に対応する通常旋回曲率に調整し、
前記オフセット角度が前記第2角度範囲内にある場合、前記運搬車の前記追従動作中の前記旋回曲率を、前記オフセット角度に対応する前記通常旋回曲率よりも低減した抑制旋回曲率に調整する、請求項1の運搬車。
【請求項3】
前記運搬車は、前記追従動作の実行が許容される追従モードと、前記追従動作の実行が禁止され、ユーザからの操作に基づいて移動する手動モードと、の間で切り替え可能であり、
前記追従モードにおける前記運搬車の最小旋回半径は、前記手動モードにおける前記運搬車の最小旋回半径よりも大きい、請求項1または2の運搬車。
【請求項4】
前記追従動作制御処理において、前記制御部は、前記オフセット角度が前記第1角度範囲および前記第2角度範囲を除く第3角度範囲内にある場合、前記原動機を停止させて、前記運搬車による前記追従動作を停止させる、請求項1から3の何れか一項の運搬車。
【請求項5】
自律的に追従対象に追従する追従動作を実行可能な運搬車であって、
車体と、
前記車体に支持されており、地面に接地する車輪と、
前記車輪を駆動する原動機と、
前記運搬車の前進方向に対する前記追従対象のオフセット角度を検出するオフセット角度検出部と、
制御部と、を備えており、
前記制御部は、
前記オフセット角度が0度を含む動作角度範囲内にある場合、前記原動機を動作させて、前記運搬車に前記追従動作を実行させ、
前記オフセット角度が前記動作角度範囲に隣接する停止角度範囲内にある場合、前記原動機を停止させて、前記運搬車による前記追従動作を停止させる、運搬車。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、運搬車に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、自律的に追従対象に追従する追従動作を実行可能な運搬車が開示される。前記運搬車は、車体と、前記車体に支持されており、地面に接地する車輪と、前記車輪を駆動する原動機と、前記運搬車の前進方向に対する前記追従対象のオフセット角度を検出するオフセット角度検出部と、制御部と、を備える。
【先行技術文献】
【特許文献】
【0003】
国際公開第2023/065170号
【発明の概要】
【発明が解決しようとする課題】
【0004】
運搬車による追従動作の実行中、運搬車を追従対象に素早く追従させるために、運搬車に旋回動作を行なわせる場合がある。ここでいう旋回動作とは、運搬車の前進方向を左回りまたは右回りに回転させながら、運搬車を前進させる動作である。ただし、運搬車に旋回動作を行なわせると、運搬車の通過する範囲が拡大する(例えば、内輪差が生じる)ので、運搬車が障害物に接触しやすくなる。仮に運搬車が障害物に接触すると、運搬車の追従動作が円滑に進行しない可能性がある。本明細書では、運搬車の追従動作を円滑に進行させることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する運搬車は、自律的に追従対象に追従する追従動作を実行可能である。前記運搬車は、車体と、前記車体に支持されており、地面に接地する車輪と、前記車輪を駆動する原動機と、前記運搬車の前進方向に対する前記追従対象のオフセット角度を検出するオフセット角度検出部と、制御部と、を備える。前記制御部は、前記運搬車の前記追従動作を制御する追従動作制御処理を実行可能に構成されている。前記追従動作制御処理において、前記制御部は、前記オフセット角度が0度を含む第1角度範囲内にある場合、前記運搬車の前記追従動作中の旋回度を、前記オフセット角度に対応する通常旋回度に調整し、前記オフセット角度が前記第1角度範囲に隣接する第2角度範囲内にある場合、前記運搬車の前記追従動作中の前記旋回度を、前記オフセット角度に対応する前記通常旋回度よりも抑制した抑制旋回度に調整する。
【0006】
オフセット角度の絶対値が大きいほど、運搬車の前進方向を追従対象に向けるために必要な旋回角度が大きくなるので、運搬車の旋回度を大きくすることが考えられる。しかしながら、運搬車の旋回度が過度に大きくなると、運搬車の通過する範囲が過度に拡大するおそれがある。その結果、運搬車が障害物に接触して、運搬車の追従動作が円滑に進行しなくなるおそれがある。上記の構成によれば、オフセット角度が第2角度範囲内にある場合(即ち、オフセット角度の絶対値が比較的大きい場合)、運搬車の旋回度が通常よりも抑制される。このため、運搬車の旋回度が過度に大きくなることを抑制でき、それによって運搬車の通過する範囲が過度に拡大することを抑制できる。これにより、運搬車が障害物に接触することを抑制できるので、運搬車の追従動作を円滑に進行させることができる。
【0007】
本明細書が開示する別の運搬車は、自律的に追従対象に追従する追従動作を実行可能である。前記運搬車は、車体と、前記車体に支持されており、地面に接地する車輪と、前記車輪を駆動する原動機と、前記運搬車の前進方向に対する前記追従対象のオフセット角度を検出するオフセット角度検出部と、制御部と、を備える。前記制御部は、前記オフセット角度が0度を含む動作角度範囲内にある場合、前記原動機を動作させて、前記運搬車に前記追従動作を実行させ、前記オフセット角度が前記動作角度範囲に隣接する停止角度範囲内にある場合、前記原動機を停止させて、前記運搬車による前記追従動作を停止させる。
【0008】
オフセット角度の絶対値が大きいほど、運搬車の前進方向を追従対象に向けるために必要な旋回角度が大きくなるので、運搬車を大きく旋回させることになる。しかしながら、運搬車を大きく旋回させると、運搬車が障害物に接触して、運搬車の追従動作が円滑に進行しなくなるおそれがある。上記の構成によれば、オフセット角度が動作角度範囲内にある場合(即ち、オフセット角度の絶対値が比較的小さい場合)、運搬車による追従動作が実行される。オフセット角度が停止角度範囲内にある場合(即ち、オフセット角度の絶対値が比較的大きい場合)、運搬車による追従動作が停止される。これにより、運搬車が大きく旋回することを抑制できる。その結果、運搬車が障害物に接触することを抑制できるので、運搬車の追従動作を円滑に進行させることができる。
【0009】
なお、本明細書でいう「旋回度」は、運搬車が行う旋回動作の緩急を示す指標である。「旋回度」は、例えば、「運搬車の旋回半径の曲率(旋回曲率)」や「運搬車の前進方向に対する操舵輪の切れ角」に置き換えることができる。
【図面の簡単な説明】
【0010】
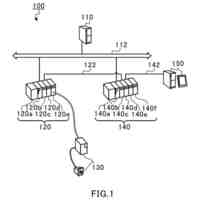
実施例1に係る運搬車2の全体斜視図である。
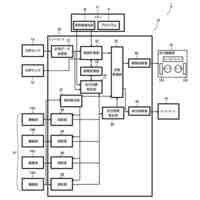
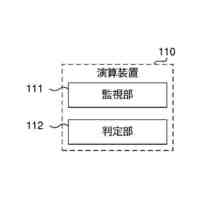
実施例1に係る運搬車2の構成を示すブロック図である。
実施例1に係るビーコン82の全体斜視図である。
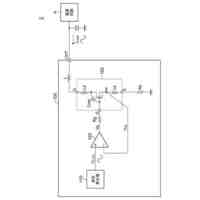
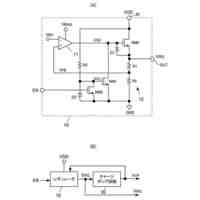
実施例1に係るビーコン82の電気的な構成を示す回路図である。
実施例1に係るビーコン82の主電源がONの場合に、ビーコン82のマイコン102が実行する処理のフローチャートである。
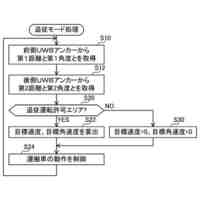
実施例1に係る運搬車2の主電源がONの場合に、運搬車2の制御部52が実行する処理のフローチャートである。
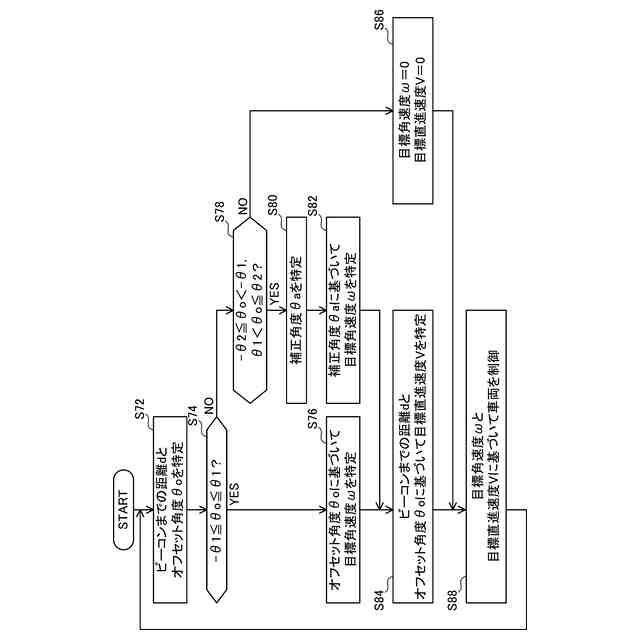
実施例1に係る運搬車2の制御部52が実行する追従動作制御処理のフローチャートである。
実施例1に係る運搬車2から見た第1角度範囲A1、第2角度範囲A2、および第3角度範囲A3を模式的に示す図である。
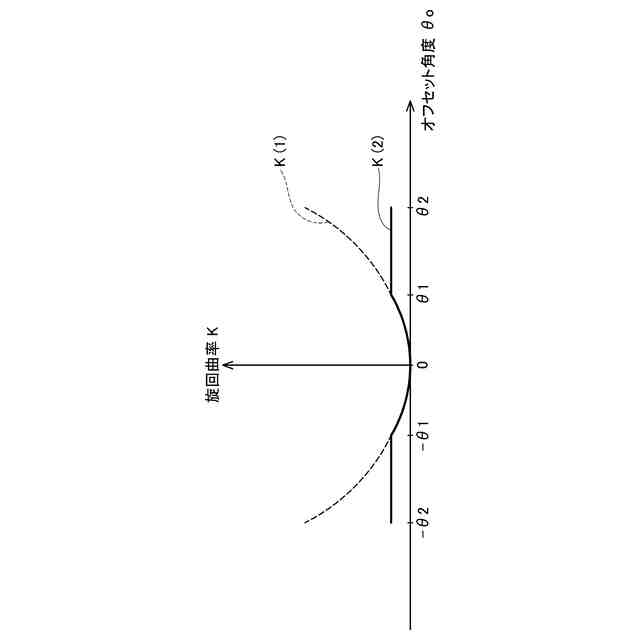
実施例1に係る運搬車2における、オフセット角度θoと、運搬車2の追従動作中の旋回曲率Kと、の関係の例を示すグラフである。
実施例2に係る運搬車2の制御部52が実行する追従動作制御処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
24日前
オムロン株式会社
スレーブ装置
今日
ローム株式会社
基準電圧源
21日前
愛知製鋼株式会社
車両用システム
1か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
10日前
株式会社ダイフク
搬送設備
28日前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
減圧弁
1か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
トヨタ自動車株式会社
制御装置
今日
キヤノン株式会社
配送システム
24日前
株式会社ダイフク
物品搬送設備
10日前
株式会社CAOS
移動体の制御システム
20日前
アズビル株式会社
制御システムおよび制御方法
2か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
株式会社TMEIC
安全性診断装置
4日前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
シンフォニアテクノロジー株式会社
自動走行車両
19日前
ローム株式会社
電源回路用の電子負荷装置
4日前
トヨタ自動車株式会社
情報処理装置
今日
ミツミ電機株式会社
電源回路および駆動回路
2か月前
トヨタ自動車株式会社
生産順序計画システム
1か月前
株式会社マキタ
運搬車
4日前
株式会社マキタ
運搬車
4日前
チームラボ株式会社
走行システム及び走行装置
1か月前
株式会社アマダ
加工スケジュール設定装置
2か月前
株式会社IHI
制御システム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ