TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096611
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2025068014,2021113074
出願日
2025-04-17,2021-07-07
発明の名称
鉄筋結束ロボット
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
E04G
21/12 20060101AFI20250619BHJP(建築物)
要約
【課題】鉄筋結束ロボットにおいて、鉄筋結束作業の実行中に、鉄筋結束作業を中断し、鉄筋結束作業を中断した位置から特定位置に移動させることが可能な技術を提供する。
【解決手段】本明細書は、一次鉄筋と二次鉄筋の上を移動する動作と、一次鉄筋と二次鉄筋が交差する箇所を結束する動作を交互に繰り返し行う鉄筋結束作業を実行可能な鉄筋結束ロボットを開示する。鉄筋結束ロボットは、制御ユニットと、縦方向移動機構と、横方向移動機構と、鉄筋結束ロボットの現在位置を検出する位置情報検出機構を備える。制御ユニットは、鉄筋結束ロボットが鉄筋結束作業を行うことなく鉄筋結束ロボットの現在位置から特定位置に移動する動作を行うように、縦方向移動機構または横方向移動機構の少なくとも一方を駆動する帰還処理を実行可能に構成される。制御ユニットは、鉄筋結束作業の実行中に所定条件が満たされる場合に、帰還処理を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の一次鉄筋と、前記複数の一次鉄筋と交差する複数の二次鉄筋について、前記複数の一次鉄筋と前記複数の二次鉄筋の上を移動する動作と、前記複数の一次鉄筋と前記複数の二次鉄筋が交差する箇所を結束する動作を交互に繰り返し行う鉄筋結束作業を実行可能な鉄筋結束ロボットであって、
鉄筋結束ユニットと、
前記鉄筋結束ユニットを搬送する搬送ユニットと、
前記搬送ユニットの動作を制御する制御ユニットを備えており、
前記搬送ユニットが、
前記鉄筋結束ロボットを前後方向に移動させることが可能な縦方向移動機構と、
前記鉄筋結束ロボットを左右方向に移動させることが可能な横方向移動機構と、
前記複数の一次鉄筋と前記複数の二次鉄筋に対する前記鉄筋結束ロボットの現在位置を検出する位置情報検出機構を備えており、
前記制御ユニットが、
前記鉄筋結束ロボットが、前記鉄筋結束作業を行うことなく、前記位置情報検出機構で検出された前記鉄筋結束ロボットの前記現在位置から特定位置に移動する動作を行うように、前記縦方向移動機構または前記横方向移動機構の少なくとも一方を駆動する帰還処理を実行可能に構成されており、
前記制御ユニットが、前記鉄筋結束作業の実行中に、所定条件が満たされる場合に、前記帰還処理を実行する、鉄筋結束ロボット。
続きを表示(約 1,500 文字)
【請求項2】
前記制御ユニットが、前記鉄筋結束作業の継続が可能であるか否かを判定する継続可否判定処理をさらに実行可能に構成されており、
前記所定条件が、前記制御ユニットが、前記継続可否判定処理において、前記鉄筋結束作業の継続が可能でないと判定するという第1所定条件を含む、請求項1の鉄筋結束ロボット。
【請求項3】
前記制御ユニットが、外部からの命令信号を受信可能に構成されており、
前記所定条件が、前記制御ユニットが、前記外部からの前記命令信号を受信するという第2所定条件を含む、請求項1または2の鉄筋結束ロボット。
【請求項4】
前記特定位置が、ユーザにより指定された位置を含む、請求項1から3の何れか一項の鉄筋結束ロボット。
【請求項5】
前記特定位置が、ユーザにより指定された鉄筋端の位置を含む、請求項1から3の何れか一項の鉄筋結束ロボット。
【請求項6】
前記特定位置が、前記現在位置からの移動経路が最短となる鉄筋端の位置を含む、請求項1から3の何れか一項の鉄筋結束ロボット。
【請求項7】
前記位置情報検出機構が、前記複数の一次鉄筋と前記複数の二次鉄筋における結束済領域および未結束領域をさらに検出し、
前記特定位置が、前記結束済領域内にある鉄筋端のうち、前記現在位置からの移動経路が最短となる鉄筋端の位置を含む、請求項1から3の何れか一項の鉄筋結束ロボット。
【請求項8】
前記鉄筋結束ロボットが、前記鉄筋結束作業において、前記複数の一次鉄筋が延びる方向に前記複数の一次鉄筋と前記複数の二次鉄筋の上を移動する動作と、前記複数の一次鉄筋と前記複数の二次鉄筋が交差する箇所を結束する動作を交互に繰り返し行うように構成されており、
前記特定位置が、前記現在位置から見て前記前後方向に位置する鉄筋端のうち、前記現在位置からの移動経路が最短となる鉄筋端の位置を含む、請求項1から3の何れか一項の鉄筋結束ロボット。
【請求項9】
前記鉄筋結束ロボットが、前記鉄筋結束作業において、前記複数の一次鉄筋が延びる方向に前記複数の一次鉄筋と前記複数の二次鉄筋の上を移動する動作と、前記複数の一次鉄筋と前記複数の二次鉄筋が交差する箇所を結束する動作を交互に繰り返し行うように構成されており、
前記位置情報検出機構が、前記複数の一次鉄筋と前記複数の二次鉄筋における結束済領域および未結束領域をさらに検出し、
前記特定位置が、前記現在位置から見て前記前後方向に位置し、かつ前記結束済領域内にある鉄筋端のうち、前記現在位置からの移動経路が最短となる鉄筋端の位置を含む、請求項1から3の何れか一項の鉄筋結束ロボット。
【請求項10】
前記制御ユニットが、前記特定位置の候補となる少なくとも1つの候補位置のそれぞれについて、前記鉄筋結束ロボットが前記現在位置から前記候補位置へ移動する場合のコストを算出し、算出した前記候補位置のコストに基づいて、前記少なくとも1つの候補位置の中から前記特定位置を決定する特定位置決定処理を実行可能に構成されており、
前記制御ユニットが、前記帰還処理において、前記鉄筋結束ロボットが、前記現在位置から前記特定位置に移動するように、前記縦方向移動機構または前記横方向移動機構の少なくとも一方を駆動するように構成されている、請求項1から3の何れか一項の鉄筋結束ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、鉄筋結束ロボットに関する。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
特許文献1には、複数の一次鉄筋と、前記複数の一次鉄筋と交差する複数の二次鉄筋について、前記複数の一次鉄筋と前記複数の二次鉄筋の上を移動する動作と、前記複数の一次鉄筋と前記複数の二次鉄筋が交差する箇所を結束する動作を交互に繰り返し行う鉄筋結束作業を実行可能な鉄筋結束ロボットが開示されている。前記鉄筋結束ロボットは、鉄筋結束ユニットと、前記鉄筋結束ユニットを搬送する搬送ユニットと、前記搬送ユニットの動作を制御する制御ユニットを備えている。前記搬送ユニットは、前記鉄筋結束ロボットを前後方向に移動させることが可能な縦方向移動機構と、前記鉄筋結束ロボットを左右方向に移動させることが可能な横方向移動機構を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2019-39174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されているような鉄筋結束ロボットにおいては、鉄筋結束作業の実行中に、鉄筋結束作業を中断し、鉄筋結束作業を中断した位置から特定位置に移動させたい場合がある。本明細書では、鉄筋結束ロボットにおいて、鉄筋結束作業の実行中に、鉄筋結束作業を中断し、鉄筋結束作業を中断した位置から特定位置に移動させることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書は、複数の一次鉄筋と、前記複数の一次鉄筋と交差する複数の二次鉄筋について、前記複数の一次鉄筋と前記複数の二次鉄筋の上を移動する動作と、前記複数の一次鉄筋と前記複数の二次鉄筋が交差する箇所を結束する動作を交互に繰り返し行う鉄筋結束作業を実行可能な鉄筋結束ロボットを開示する。前記鉄筋結束ロボットは、鉄筋結束ユニットと、前記鉄筋結束ユニットを搬送する搬送ユニットと、前記搬送ユニットの動作を制御する制御ユニットを備えていてもよい。前記搬送ユニットは、前記鉄筋結束ロボットを前後方向に移動させることが可能な縦方向移動機構と、前記鉄筋結束ロボットを左右方向に移動させることが可能な横方向移動機構と、前記複数の一次鉄筋と前記複数の二次鉄筋に対する前記鉄筋結束ロボットの現在位置を検出する位置情報検出機構を備えていてもよい。前記制御ユニットは、前記鉄筋結束ロボットが、前記鉄筋結束作業を行うことなく、前記位置情報検出機構で検出された前記鉄筋結束ロボットの前記現在位置から特定位置に移動する動作を行うように、前記縦方向移動機構または前記横方向移動機構の少なくとも一方を駆動する帰還処理を実行可能に構成されていてもよい。前記制御ユニットは、前記鉄筋結束作業の実行中に、所定条件が満たされる場合に、前記帰還処理を実行してもよい。
【0006】
上記の構成によれば、鉄筋結束ロボットにおいて、鉄筋結束作業の実行中に、鉄筋結束作業を中断し、鉄筋結束作業を中断した位置から特定位置に移動させることができる。
【図面の簡単な説明】
【0007】
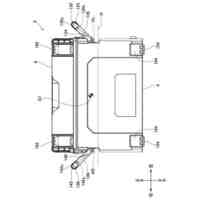
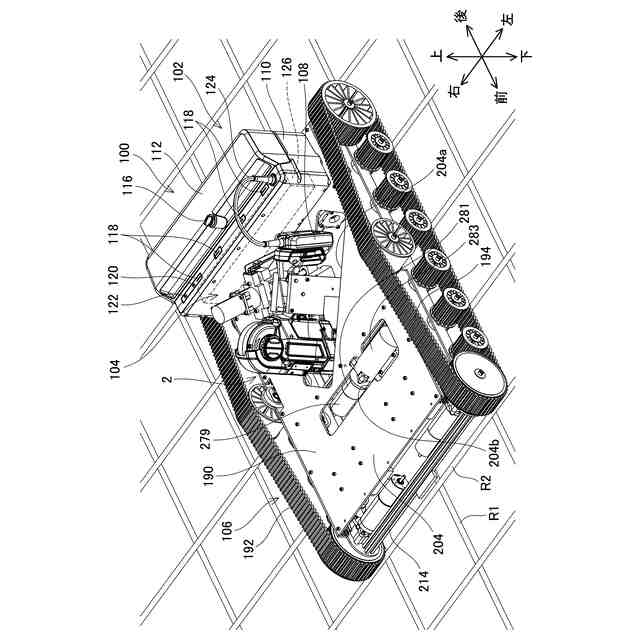
実施例1および2に係る鉄筋結束ロボット100の前方左方上方から見た斜視図である。
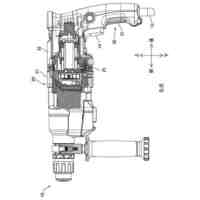
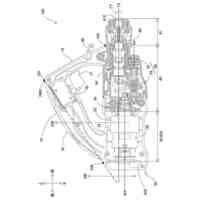
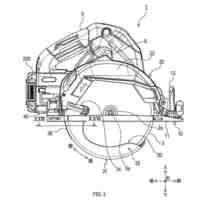
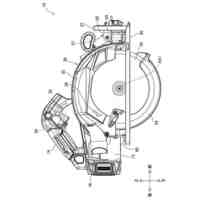
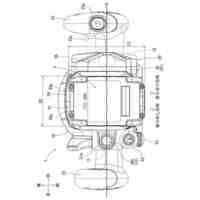
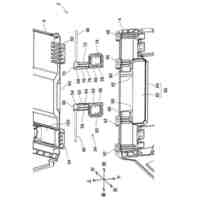
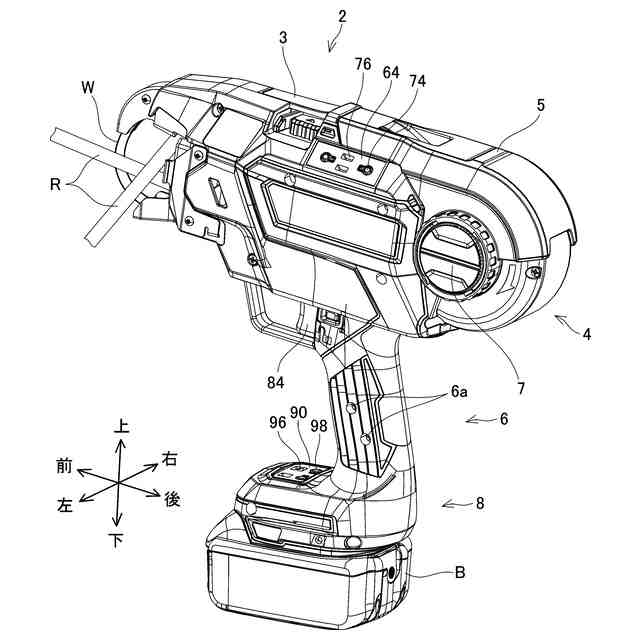
実施例1および2に係る鉄筋結束ロボット100で使用される鉄筋結束機2を後方左方上方から見た斜視図である。
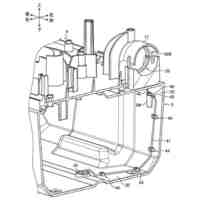
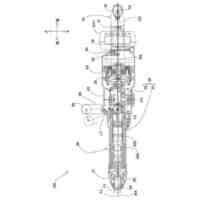
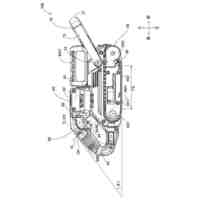
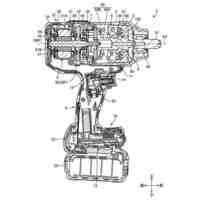
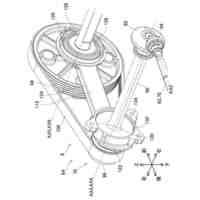
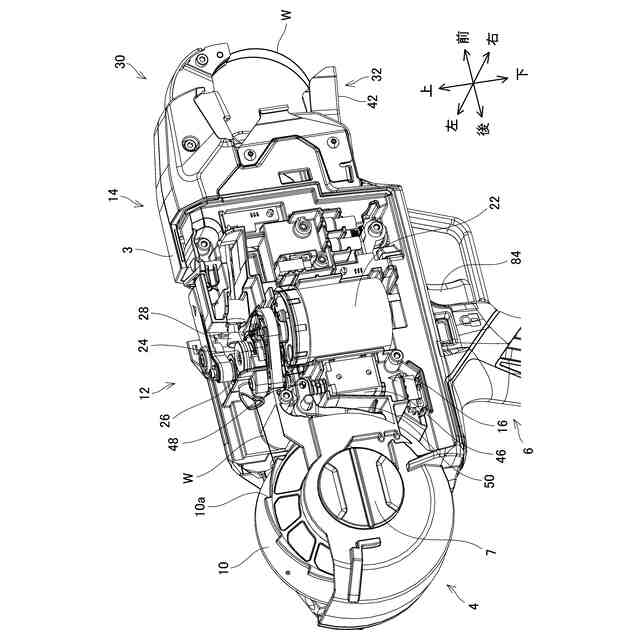
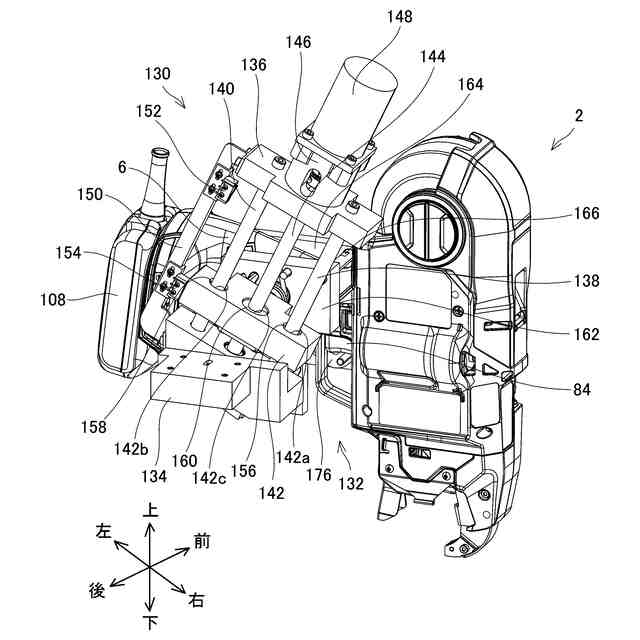
実施例1および2に係る鉄筋結束ロボット100で使用される鉄筋結束機2の本体部4の内部構造を後方右方上方から見た斜視図である。
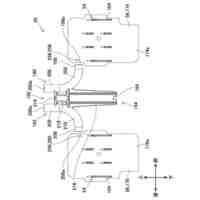
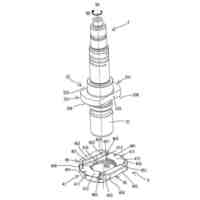
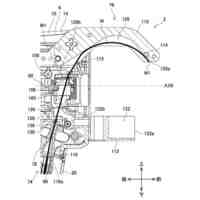
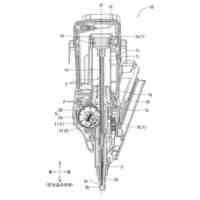
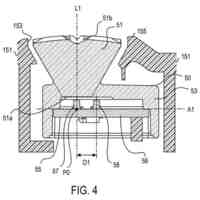
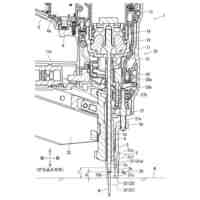
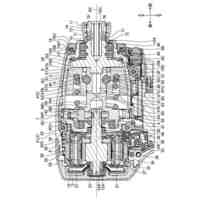
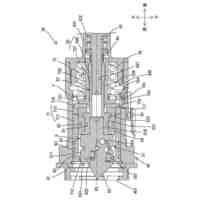
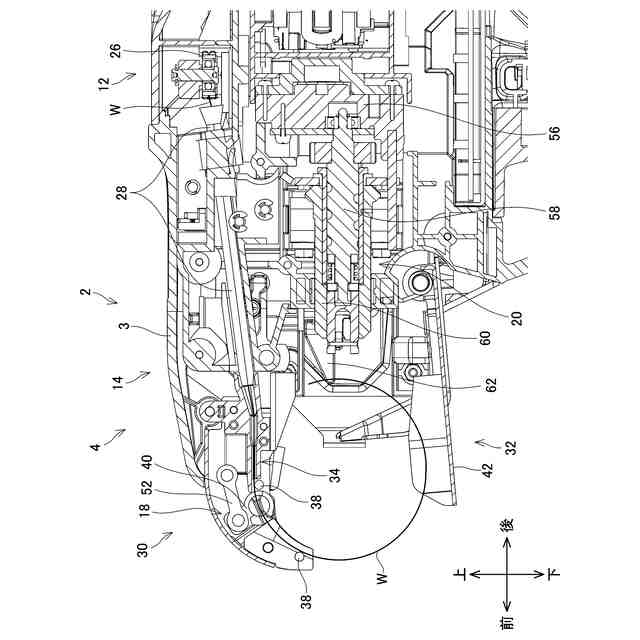
実施例1および2に係る鉄筋結束ロボット100で使用される鉄筋結束機2の本体部4の前方部分の断面図である。
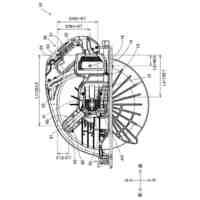
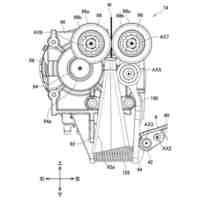
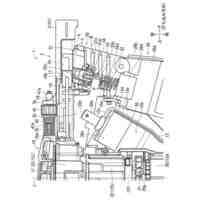
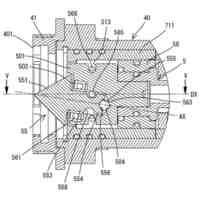
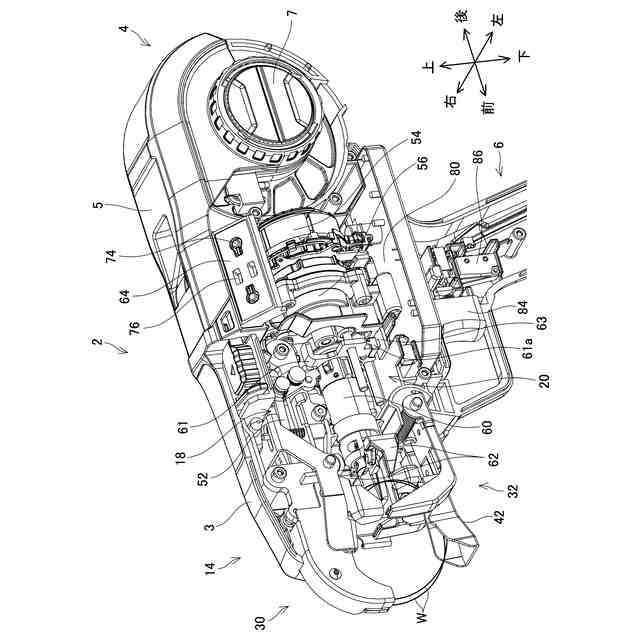
実施例1および2に係る鉄筋結束ロボット100で使用される鉄筋結束機2の本体部4および把持部6の上部の内部構造を前方左方上方から見た斜視図である。
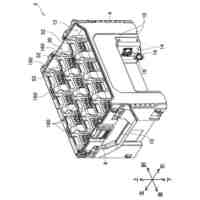
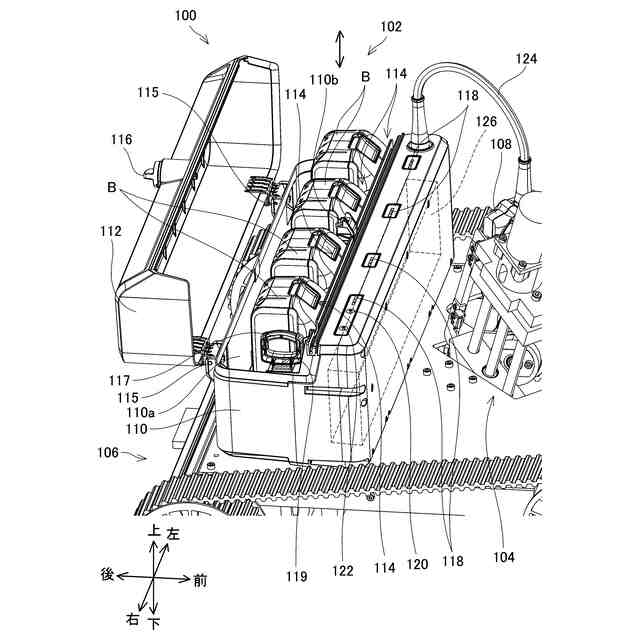
実施例1および2に係る鉄筋結束ロボット100の電源ユニット102について、カバー112が開いた状態を前方右方上方から見た斜視図である。
実施例1および2に係る鉄筋結束ロボット100において、操作ユニット104に鉄筋結束機2が取り付けられた状態を、後方右方上方から見た斜視図である。
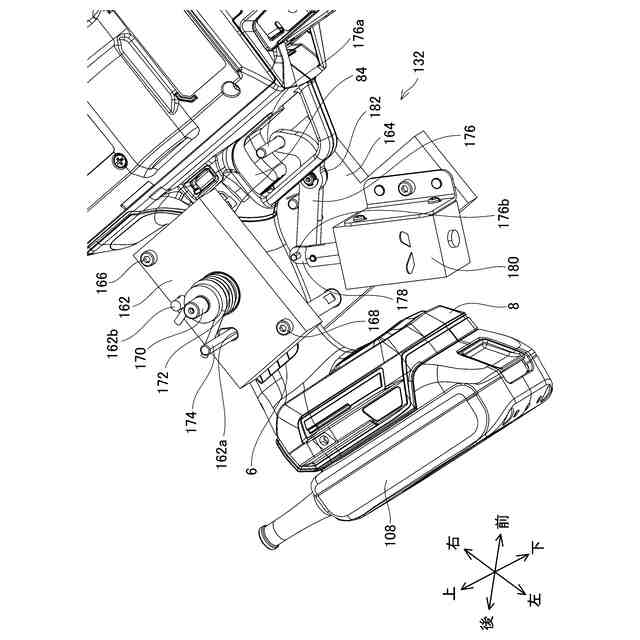
実施例1および2に係る鉄筋結束ロボット100において、把持機構132に鉄筋結束機2が取り付けられた状態を、後方右方下方から見た斜視図である。
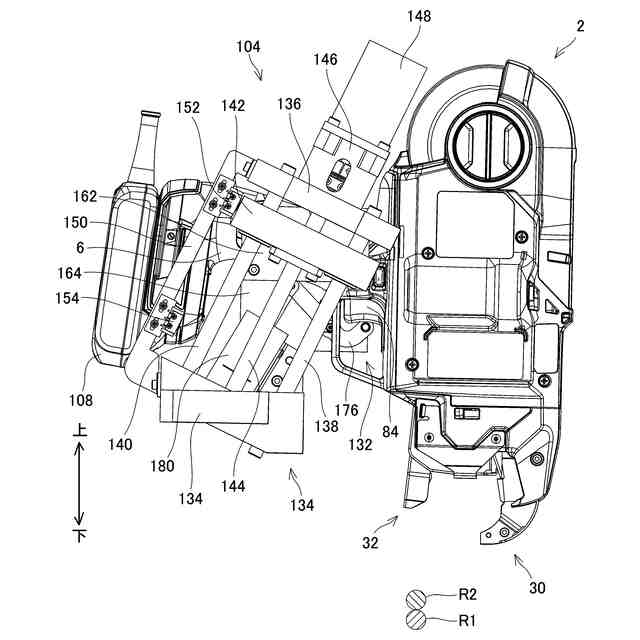
実施例1および2に係る鉄筋結束ロボット100において、鉄筋結束機2が上昇した状態における、操作ユニット104と鉄筋結束機2を側方から見た側面図である。
実施例1および2に係る鉄筋結束ロボット100において、鉄筋結束機2が下降した状態における、操作ユニット104と鉄筋結束機2を側方から見た側面図である。
実施例1および2に係る鉄筋結束ロボット100を前方右方下方から見た斜視図である。
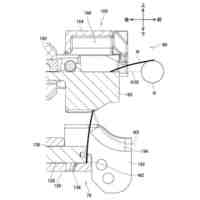
実施例1および2に係る鉄筋結束ロボット100のテンショナプーリ224の近傍を前方左方上方から見た斜視断面図である。
実施例1および2に係る鉄筋結束ロボット100のサイドステッパ196を後方右方下方から見た斜視図である。
実施例1および2に係る鉄筋結束ロボット100のサイドステッパ196の前方の部分を後方右方上方から見た斜視図である。
実施例1および2に係る鉄筋結束ロボット100の前側クランク機構276を後方から見た断面図である。
実施例1および2に係る鉄筋結束ロボット100のサイドステッパ196の後方の部分を前方右方上方から見た斜視図である。
実施例1および2に係る鉄筋結束ロボット100において、ステップバー272,274が上昇した状態を前方から見た正面図である。
実施例1および2に係る鉄筋結束ロボット100において、ステップバー272,274が下降した状態を前方から見た正面図である。
実施例1および2に係る鉄筋結束ロボット100において、制御ユニット126が保持するマップ情報に係るグリッドマップGMを模式的に示す図である。
実施例1および2に係る鉄筋結束ロボット100における、グリッドマップGMと一次鉄筋R1および二次鉄筋R2との相対的な位置関係の例を模式的に示す上面図である。
実施例1および2に係る鉄筋結束ロボット100において、制御ユニット126が現在位置小領域DRおよび前方角度αを特定する様子を模式的に示す図である。
実施例1および2に係る鉄筋結束ロボット100において、制御ユニット126が結束済小領域DAと未結束小領域DBとを区別する様子を模式的に示す図である。
実施例1および2に係る鉄筋結束ロボット100において、制御ユニット126が行う処理を示すフローチャートである。
実施例1に係る鉄筋結束ロボット100において、制御ユニット126が行う帰還処理を示すフローチャートである。
実施例1に係る鉄筋結束ロボット100において、制御ユニット126が帰還位置・経路決定処理でグリッドマップGMに記録するコスト情報、帰還位置および帰還経路を模式的に示す図である。
実施例1に係る鉄筋結束ロボット100において、制御ユニット126がグリッドマップGMに記録する指定位置と、候補帰還経路となる経路G1、G2およびG3を模式的に示す図である。
実施例2に係る鉄筋結束ロボット100において、制御ユニット126が行う帰還処理を示すフローチャートである。
実施例2に係る鉄筋結束ロボット100において、制御ユニット126が帰還位置・経路決定処理で予め設定された規則に基づいて帰還位置および帰還経路を決定する様子を模式的に示す図である。
実施例2に係る鉄筋結束ロボット100において、制御ユニット126が帰還位置・経路決定処理で予め設定された別の規則に基づいて帰還位置および帰還経路を決定する様子を模式的に示す図である。
実施例2に係る鉄筋結束ロボット100において、制御ユニット126が帰還位置・経路決定処理で予め設定されたさらに別の規則に基づいて帰還位置および帰還経路を決定する様子を模式的に示す図である。
実施例2に係る鉄筋結束ロボット100において、制御ユニット126が帰還位置・経路決定処理で予め設定されたさらにまた別の規則に基づいて帰還位置および帰還経路を決定する様子を模式的に示す図である。
変形例に係る鉄筋結束ロボット100において、制御ユニット126が帰還位置・経路決定処理でグリッドマップGMに記録する別のコスト情報、候補帰還位置および帰還経路を模式的に示す図である。
変形例に係る鉄筋結束ロボット100において制御ユニット126が帰還位置・経路決定処理でグリッドマップGMに記録するさらに別のコスト情報、帰還位置および帰還経路を模式的に示す図である。
変形例に係る鉄筋結束ロボット100において制御ユニット126が帰還位置・経路決定処理でグリッドマップGMに記録するさらにまた別のコスト情報、候補帰還位置および帰還経路を模式的に示す図である。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された鉄筋結束ロボットを提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電気機器
1か月前
株式会社マキタ
打撃工具
16日前
株式会社マキタ
電気機器
1か月前
株式会社マキタ
集じん機
1か月前
株式会社マキタ
マルノコ
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
20日前
株式会社マキタ
回転工具
2か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
鉄筋結束機
23日前
株式会社マキタ
鉄筋結束機
23日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
ベルトサンダ
1か月前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
携帯用切断機
1か月前
株式会社マキタ
打ち込み工具
2か月前
株式会社マキタ
背負式ブロワ
1か月前
株式会社マキタ
インパクト工具
2日前
株式会社マキタ
フレア形成工具
1か月前
株式会社マキタ
インパクト工具
13日前
株式会社マキタ
作業機及び表示器
2か月前
株式会社マキタ
携帯用バンドソー
1か月前
株式会社マキタ
木工用携帯用切削機
2か月前
株式会社マキタ
電動式打ち込み工具
13日前
株式会社マキタ
電気機器およびケース
1か月前
株式会社マキタ
鉄筋結束機および結束方法
23日前
株式会社マキタ
電気機器および運搬ケース
1か月前
株式会社マキタ
電気機器および運搬ケース
1か月前
株式会社マキタ
除雪機およびアタッチメント
12日前
株式会社マキタ
作業機およびアタッチメント
12日前
株式会社マキタ
インパクト工具及びスピンドル
2か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
1か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
1か月前
株式会社マキタ
接地体、及び、接地体を備える草刈機
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ