TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070153
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180271
出願日
2023-10-19
発明の名称
エンドエフェクタ及びロボット
出願人
学校法人常翔学園
,
国立大学法人富山大学
代理人
個人
主分類
B25J
15/10 20060101AFI20250424BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
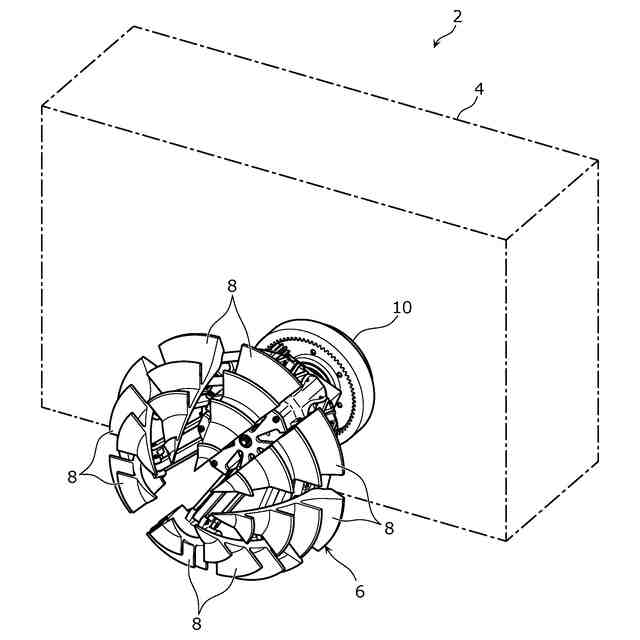
【課題】軽量化及び省スペース化を図ることができ、且つ、ロボットの作業効率を高めることができるエンドエフェクタを提供する。
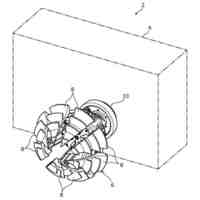
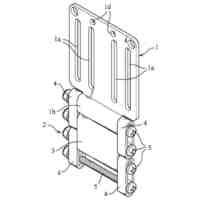
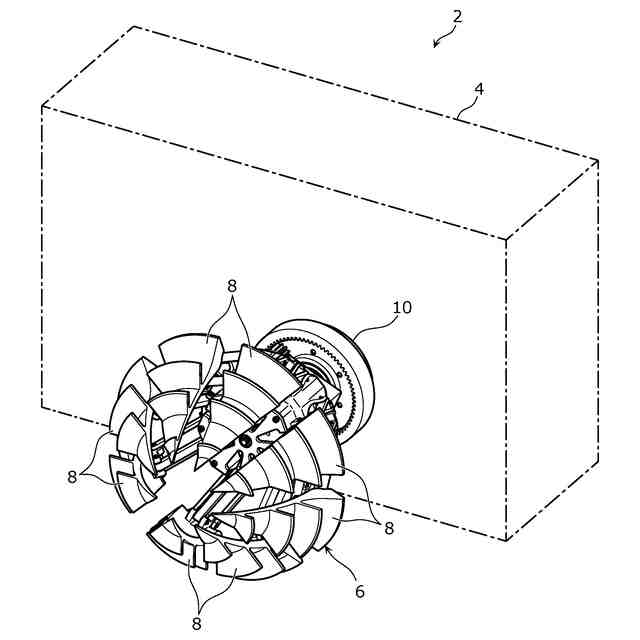
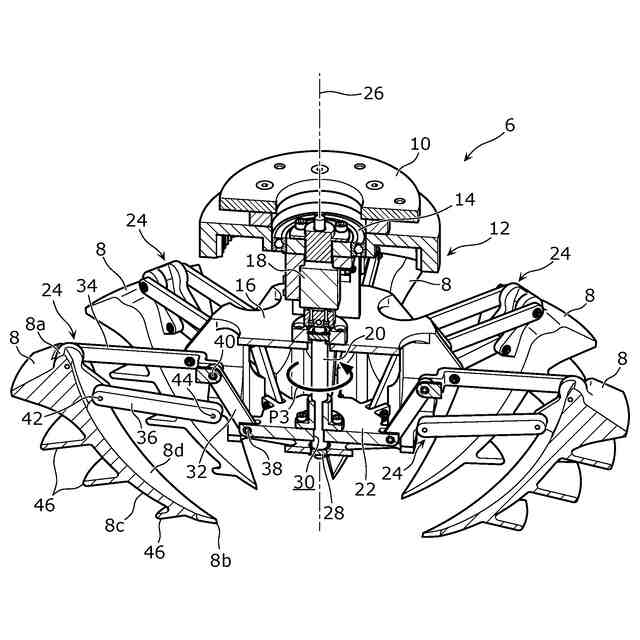
【解決手段】エンドエフェクタ6は、複数の爪部8と、複数の爪部8の形態を、互いに異なる複数の機能をそれぞれ発揮する複数の形態のうち1つの形態から他の1つの形態に変化させる駆動機構12とを備える。複数の機能は、(a)ロボット2を移動させる車輪機能、(b)対象物を把持するグリッパ機能、(c)対象物を掘り起こすショベル機能、及び、(d)対象物を掘削するドリル機能のうち少なくとも2つを含む。
【選択図】図1
特許請求の範囲
【請求項1】
対象物に対して所定の作業を行うためのロボットに搭載されるエンドエフェクタであって、
複数の爪部と、
前記複数の爪部の形態を、互いに異なる複数の機能をそれぞれ発揮する複数の形態のうち1つの形態から他の1つの形態に変化させる駆動機構と、を備え、
前記複数の機能は、(a)前記ロボットを移動させる車輪機能、(b)前記対象物を把持するグリッパ機能、(c)前記対象物を掘り起こすショベル機能、及び、(d)前記対象物を掘削するドリル機能のうち少なくとも2つを含む
エンドエフェクタ。
続きを表示(約 1,300 文字)
【請求項2】
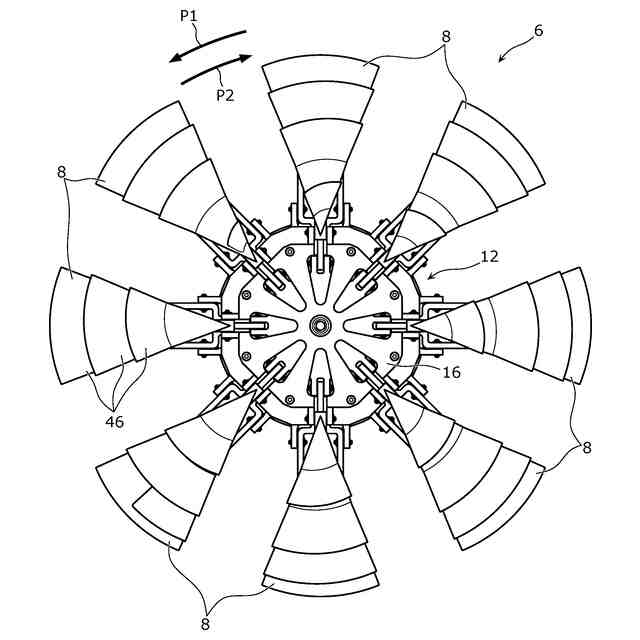
前記複数の爪部は、中心軸線の周りに周方向に沿って配置され、
前記駆動機構は、前記複数の爪部を、前記周方向に沿って互いに離隔して配置する開位置、及び、前記周方向に沿って互いに近接して配置する閉位置の一方から他方に移動させる
請求項1に記載のエンドエフェクタ。
【請求項3】
前記駆動機構は、前記複数の爪部の形態を、前記車輪機能を発揮する形態に変化させた場合、前記複数の爪部を前記開位置に位置させた状態で、前記複数の爪部を、前記中心軸線を中心に所定の方向に回転させる
請求項2に記載のエンドエフェクタ。
【請求項4】
前記駆動機構は、前記複数の爪部の形態を、前記グリッパ機能を発揮する形態に変化させた場合、前記複数の爪部を前記開位置から前記閉位置まで移動させる間に、前記複数の爪部に前記対象物を把持させる
請求項2に記載のエンドエフェクタ。
【請求項5】
前記複数の爪部は、各々の先端部で前記対象物の外周面をつまむように把持する
請求項4に記載のエンドエフェクタ。
【請求項6】
前記対象物は、第1の主面及び前記第1の主面と反対側の第2の主面を有する略板状に形成され、
前記駆動機構が、前記複数の爪部のうち一部を前記対象物の前記第1の主面に押し当て、且つ、前記複数の爪部のうち残りの一部を前記対象物の前記第2の主面に押し当てることにより、前記複数の爪部は、前記対象物を両側から挟み込むように把持する
請求項4に記載のエンドエフェクタ。
【請求項7】
前記駆動機構は、前記複数の爪部の形態を、前記ショベル機能を発揮する形態に変化させた場合、前記複数の爪部を前記開位置から前記閉位置まで移動させる間に、前記複数の爪部の各々の先端部で前記対象物を掘り起こさせる
請求項2に記載のエンドエフェクタ。
【請求項8】
前記複数の爪部の各々の外側面には、前記対象物を掘削するための複数の切刃片が形成されており、
前記駆動機構は、前記複数の爪部の形態を、前記ドリル機能を発揮する形態に変化させた場合、前記複数の爪部を前記閉位置に位置させた状態で、前記複数の爪部を、前記中心軸線を中心に所定の方向に回転させる
請求項2に記載のエンドエフェクタ。
【請求項9】
前記駆動機構が前記複数の爪部を前記閉位置に位置させた際に、前記複数の爪部の各々の前記複数の切刃片が互いに繋がることにより、少なくとも一条の螺旋状の切刃が形成される
請求項8に記載のエンドエフェクタ。
【請求項10】
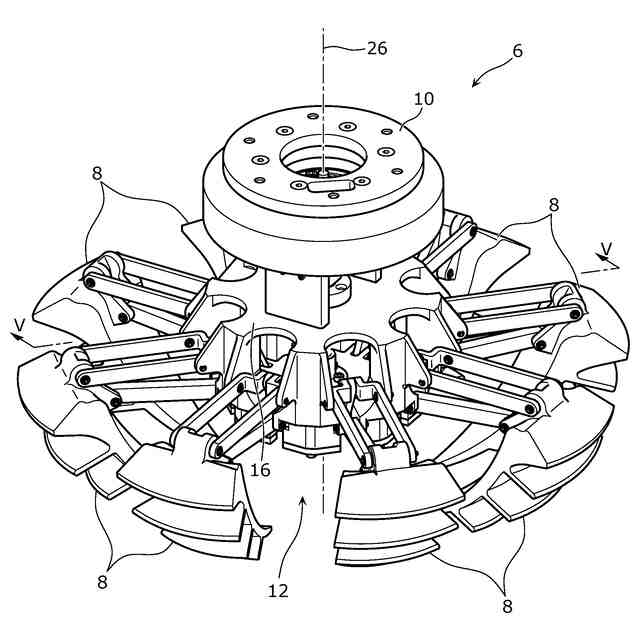
前記駆動機構は、
移動部材と、
前記移動部材を前記中心軸線に沿って往復移動させるための駆動源と、
前記移動部材と前記複数の爪部の各々とをそれぞれ連結する複数の四節リンク機構と、を含む
請求項2~9のいずれか1項に記載のエンドエフェクタ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、エンドエフェクタ及びこれを備えたロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ロボットのアームの先端部に回動可能に取り付けられたエンドエフェクタが知られている。(例えば、特許文献1参照)。従来のエンドエフェクタは、本体部と、本体部から放射状に突出する複数のツールとを備えている。複数のツールはそれぞれ、互いに異なる複数の機能を発揮する。ロボットが対象物に対して所定の作業を行う際には、エンドエフェクタをアームに対して回動させることにより、複数のツールのうち当該所定の作業に対応する機能を発揮する特定のツールを対象物に対向させる。
【先行技術文献】
【特許文献】
【0003】
特開平7-9379号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したエンドエフェクタの用途例としては、例えば、月面探査又は月面基地建設等の宇宙ミッションが挙げられる。従来のエンドエフェクタでは、ロボットが行う宇宙ミッションの作業の種類に応じた数の複数のツールを予め搭載しておく必要がある。
【0005】
しかしながら、このような従来のエンドエフェクタの構成では、エンドエフェクタの重量が重くなるとともに、エンドエフェクタが大型化してしまい、ロボットを輸送することが困難となるという課題が生じる。また、ロボットが行う作業に応じてツールの交換が必要になる場合があるため、ロボットの作業効率が低下するという課題が生じる。
【0006】
本発明は、上述した課題を解決しようとするものであり、その目的は、軽量化及び省スペース化を図ることができ、且つ、ロボットの作業効率を高めることができるエンドエフェクタ及びこれを備えたロボットを提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の態様に係るエンドエフェクタは、対象物に対して所定の作業を行うためのロボットに搭載されるエンドエフェクタであって、複数の爪部と、前記複数の爪部の形態を、互いに異なる複数の機能をそれぞれ発揮する複数の形態のうち1つの形態から他の1つの形態に変化させる駆動機構と、を備え、前記複数の機能は、(a)前記ロボットを移動させる車輪機能、(b)前記対象物を把持するグリッパ機能、(c)前記対象物を掘り起こすショベル機能、及び、(d)前記対象物を掘削するドリル機能のうち少なくとも2つを含む。
【0008】
本態様によれば、駆動機構は、複数の爪部の形態を、互いに異なる複数の機能をそれぞれ発揮する複数の形態のうち1つの形態から他の1つの形態に変化させるので、複数の爪部の形態を変化させることによって複数の機能を実現することができる。これにより、背景技術の欄で説明した従来のエンドエフェクタのように、ロボットが行う作業の種類に応じた数の複数のツールを予めエンドエフェクタに搭載する場合と比べて、エンドエフェクタの軽量化及び省スペース化を図ることができる。また、背景技術の欄で説明した従来のエンドエフェクタのように、ロボットが行う作業に応じてツールを交換する必要が無いので、ロボットの作業効率を高めることができる。
【0009】
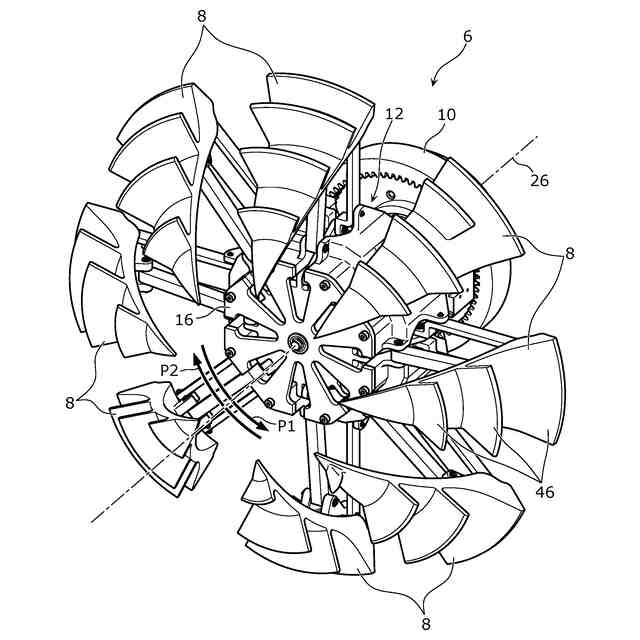
例えば、本発明の第2の態様に係るエンドエフェクタでは、第1の態様において、前記複数の爪部は、中心軸線の周りに周方向に沿って配置され、前記駆動機構は、前記複数の爪部を、前記周方向に沿って互いに離隔して配置する開位置、及び、前記周方向に沿って互いに近接して配置する閉位置の一方から他方に移動させるように構成してもよい。
【0010】
本態様によれば、複数の爪部を開位置及び閉位置の一方から他方に移動させることにより、複数の爪部の形態を容易に変化させることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
学校法人常翔学園
ナノバブルの計測システム
3日前
学校法人常翔学園
選択性ガス分離膜の製造方法
1か月前
学校法人常翔学園
エンドエフェクタ及びロボット
1か月前
学校法人常翔学園
情報処理装置、情報処理方法、およびプログラム
1か月前
学校法人常翔学園
土壌改良資材識別装置、及び土壌改良資材識別方法
1か月前
学校法人常翔学園
アスコピロンPを有効成分として含有する抑制剤、治療剤及び予防剤
2か月前
学校法人常翔学園
異種移植用材料の病原体感染を検査するための剤、検査キット、異種移植用材料の病原体感染を検査する方法、及び病原体感染が評価された異種移植用材料製品の作成方法
3か月前
株式会社ザイテック
吸着装置
2日前
OMC株式会社
ロボット
2か月前
日東精工株式会社
電動ドライバ
26日前
株式会社クレスコ
補助吸着具
2か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社不二越
ロボット
1か月前
株式会社ダイヘン
移動体
29日前
株式会社エビス
腰ベルト用連結具
2か月前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
17日前
工機ホールディングス株式会社
作業機
17日前
株式会社スター精機
吸着パッド
25日前
株式会社スター精機
吸着パッド
25日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
17日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
住友重機械工業株式会社
ロボット
1か月前
庄内機械株式会社
釘打装置
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
オークラ輸送機株式会社
ハンド装置
10日前
株式会社スター精機
産業用ロボット
23日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ