TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073050
公報種別
公開特許公報(A)
公開日
2025-05-12
出願番号
2024066799
出願日
2024-04-17
発明の名称
電動作業機
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
H02K
11/215 20160101AFI20250501BHJP(電力の発電,変換,配電)
要約
【課題】電動作業機のセンサ基板を小型化及び軽量化すること。
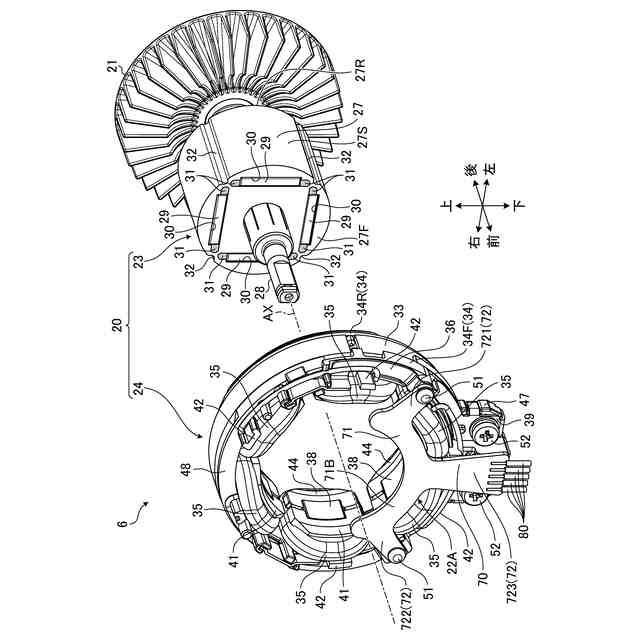
【解決手段】電動作業機は、回転軸を中心に回転するロータと、ロータの周囲に配置されるステータと、を有するモータと、ロータの回転を検出する回転センサと、回転センサを支持するプレートと、を有するセンサ基板と、を備える。ステータは、ロータの周囲に配置されるステータコアと、ステータコアに固定されるインシュレータと、インシュレータに固定され、周方向に間隔をあけて配置される複数のコイルと、を有する。プレートは、回転軸の周囲の一部に配置され、軸方向のロータの端面と対向する対向面を有する円弧部と、円弧部から径方向外側に突出し、インシュレータに固定される少なくとも2つのアーム部と、を有する。回転センサは、対向面に配置される。
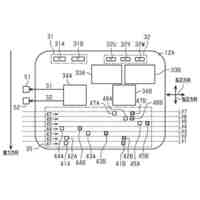
【選択図】図2
特許請求の範囲
【請求項1】
回転軸を中心に回転するロータと、前記ロータの周囲に配置されるステータと、を有するモータと、
前記ロータの回転を検出する回転センサと、前記回転センサを支持するプレートと、を有するセンサ基板と、を備え、
前記ステータは、
前記ロータの周囲に配置されるステータコアと、
前記ステータコアに固定されるインシュレータと、
前記インシュレータに固定され、周方向に間隔をあけて配置される複数のコイルと、を有し、
前記プレートは、
前記回転軸の周囲の一部に配置され、軸方向の前記ロータの端面と対向する対向面を有する円弧部と、
前記円弧部から径方向外側に突出し、前記インシュレータに固定される少なくとも2つのアーム部と、を有し、
前記回転センサは、前記対向面に配置される、
電動作業機。
続きを表示(約 800 文字)
【請求項2】
前記円弧部は、前記コイルよりも径方向内側に配置される、
請求項1に記載の電動作業機。
【請求項3】
径方向外側の前記アーム部の端部は、前記コイルよりも径方向外側に配置され、
前記アーム部の端部が前記インシュレータに固定される、
請求項2に記載の電動作業機。
【請求項4】
軸方向において、前記対向面は、前記コイルの一端部よりも前記コイルの中心に近い位置に配置される、
請求項2に記載の電動作業機。
【請求項5】
前記円弧部は、前記対向面の逆方向を向く逆向面を有し、
軸方向において、前記逆向面は、前記コイルの一端部よりも前記コイルの中心に近い位置に配置される、
請求項4に記載の電動作業機。
【請求項6】
前記プレートは、平行平板である、
請求項4又は請求項5に記載の電動作業機。
【請求項7】
前記アーム部は、相互に隣り合う一対のコイルの間に配置される、
請求項6に記載の電動作業機。
【請求項8】
前記アーム部は、第1アーム部と、第2アーム部と、を含み、
前記第1アーム部は、周方向の前記円弧部の一端部から径方向外側に突出し、
前記第2アーム部は、周方向の前記円弧部の他端部から径方向外側に突出する、
請求項7に記載の電動作業機。
【請求項9】
前記プレートは、
径方向外側の前記第1アーム部の端部と前記第2アーム部の端部とを繋ぐブリッジ部を有する、
請求項8に記載の電動作業機。
【請求項10】
前記ブリッジ部は、前記回転軸の周囲の一部に配置される円弧状である、
請求項9に記載の電動作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、電動作業機に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
電動作業機に係る技術分野において、特許文献1に開示されているような、モータ及びセンサ基板を備える電動作業機が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2022-012822号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電動作業機が大型化すると、電動作業機を使用する作業者は、電動作業機を円滑に使用することが困難になる可能性がある。そのため、電動作業機の小型化及び軽量化が要求される。電動作業機がセンサ基板を備える場合、センサ基板の小型化及び軽量化が、電動作業機の小型化及び軽量化に寄与する。
【0005】
本明細書で開示する技術は、電動作業機のセンサ基板を小型化及び軽量化することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、電動作業機を開示する。電動作業機は、回転軸を中心に回転するロータと、ロータの周囲に配置されるステータと、を有するモータと、ロータの回転を検出する回転センサと、回転センサを支持するプレートと、を有するセンサ基板と、を備えてもよい。ステータは、ロータの周囲に配置されるステータコアと、ステータコアに固定されるインシュレータと、インシュレータに固定され、周方向に間隔をあけて配置される複数のコイルと、を有してもよい。プレートは、回転軸の周囲の一部に配置され、軸方向のロータの端面と対向する対向面を有する円弧部と、円弧部から径方向外側に突出し、インシュレータに固定される少なくとも2つのアーム部と、を有してもよい。回転センサは、対向面に配置されてもよい。
【発明の効果】
【0007】
本明細書で開示する技術によれば、電動作業機のセンサ基板を小型化及び軽量化することができる。
【図面の簡単な説明】
【0008】
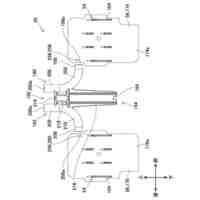
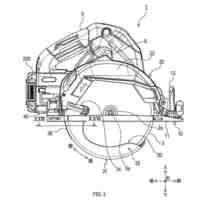
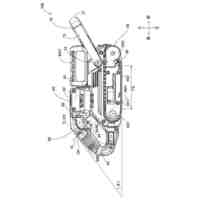
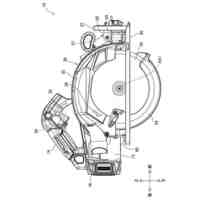
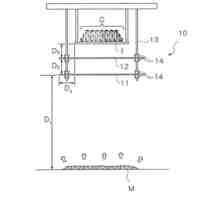
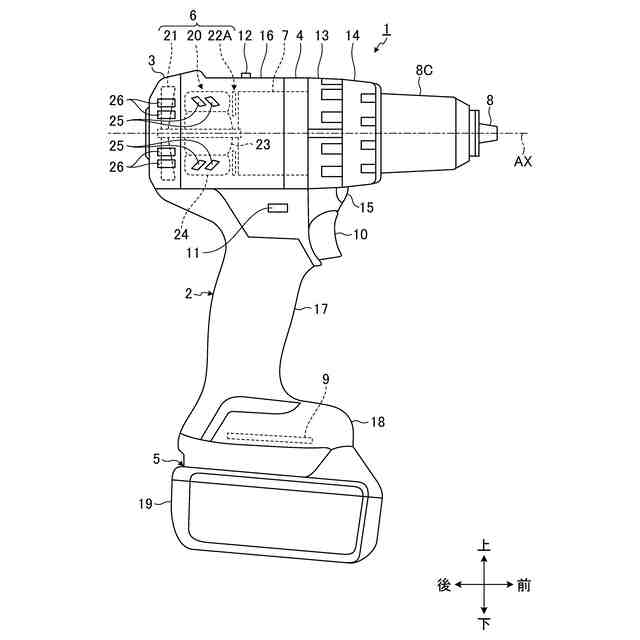
図1は、第1実施形態に係る電動作業機を示す側面図である。
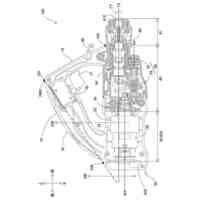
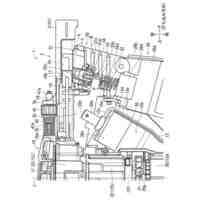
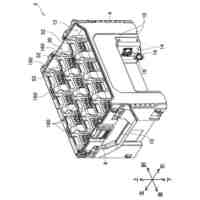
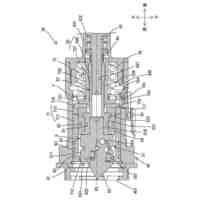
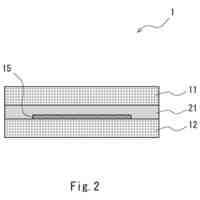
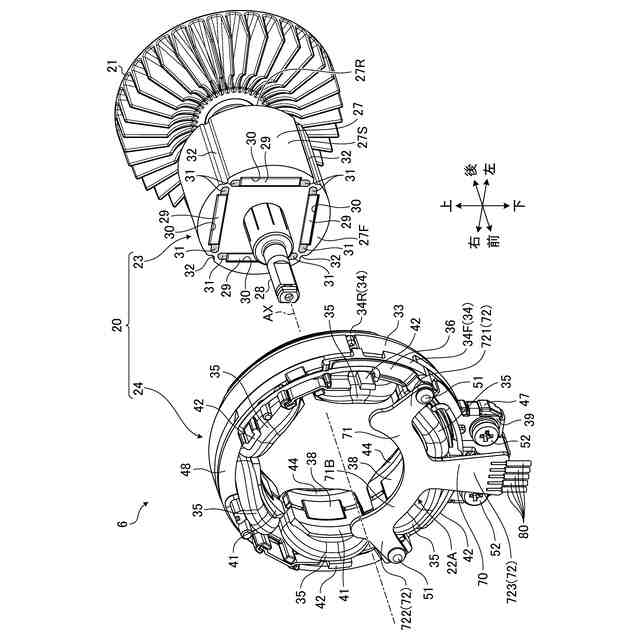
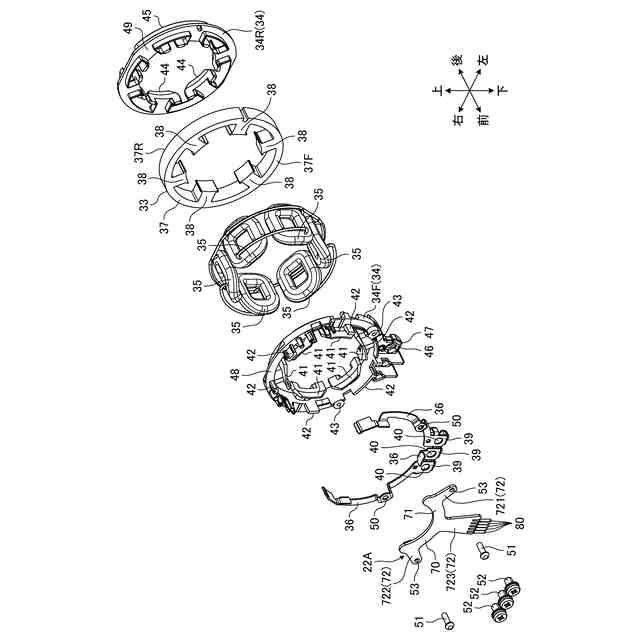
図2は、第1実施形態に係るモータアセンブリを示す前方からの分解斜視図である。
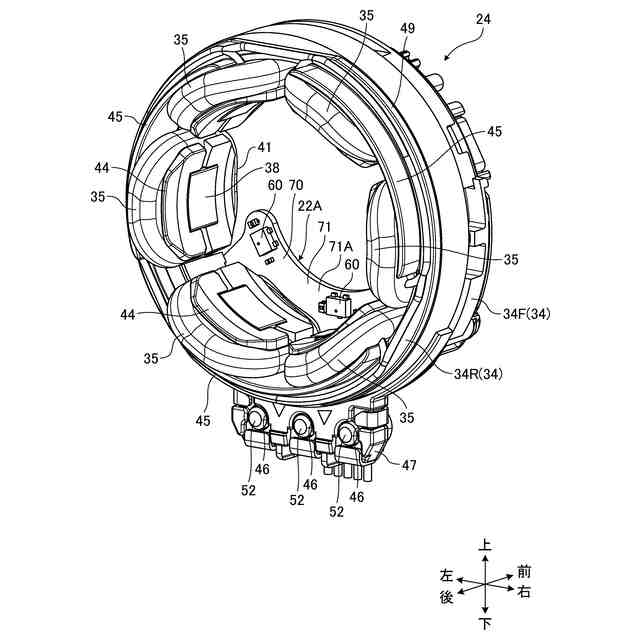
図3は、第1実施形態に係るステータ及びセンサ基板を示す後方からの斜視図である。
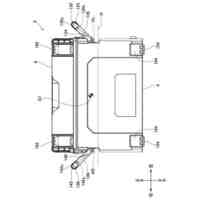
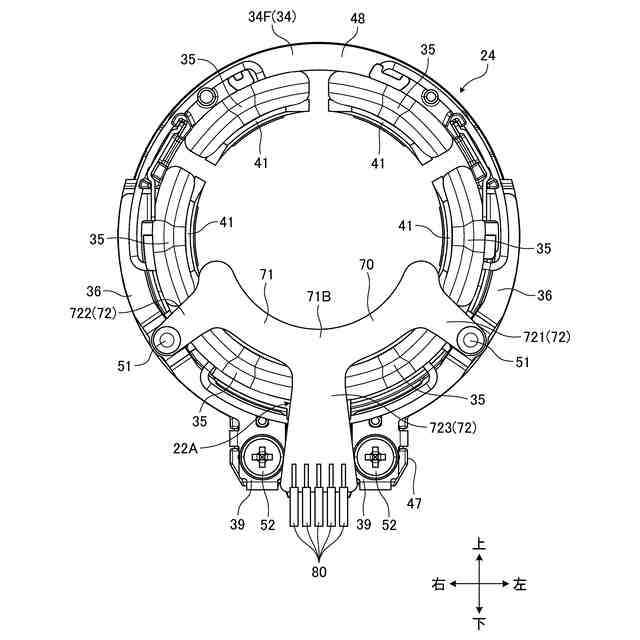
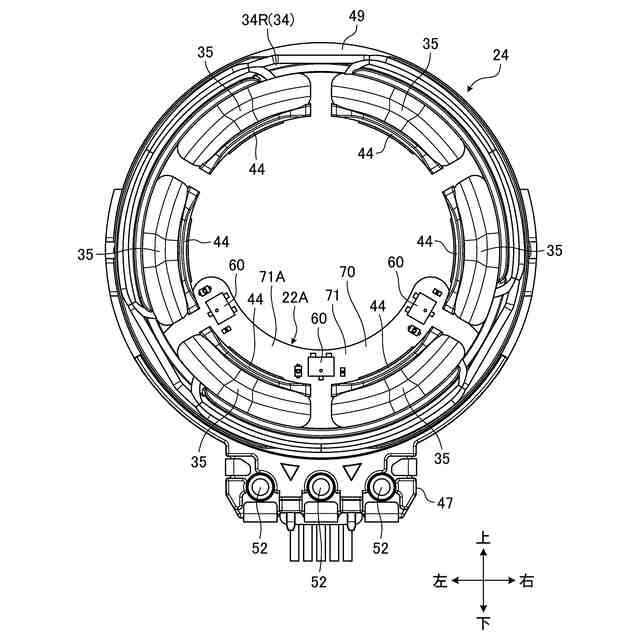
図4は、第1実施形態に係るステータ及びセンサ基板を前方から視た図である。
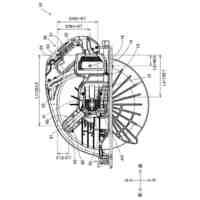
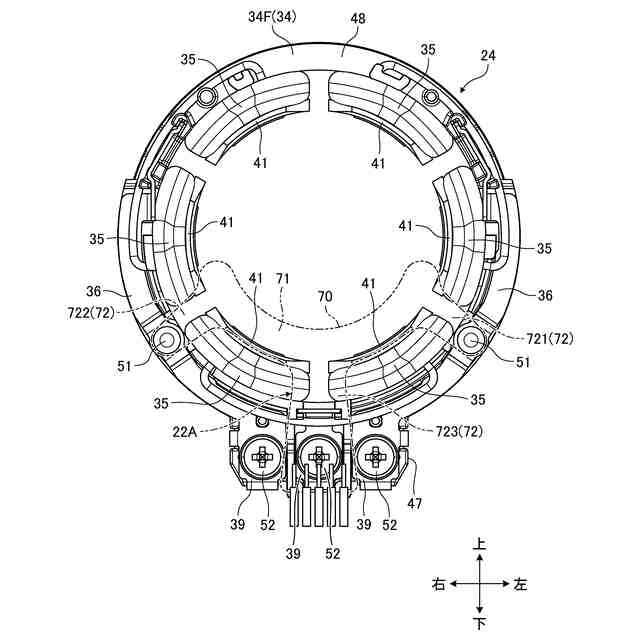
図5は、第1実施形態に係るステータを前方から視た図である。
図6は、第1実施形態に係るステータ及びセンサ基板を後方から視た図である。
図7は、第1実施形態に係るステータ及びセンサ基板を左方から視た図である。
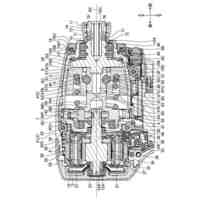
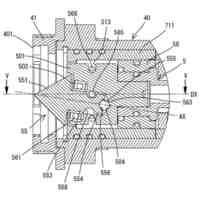
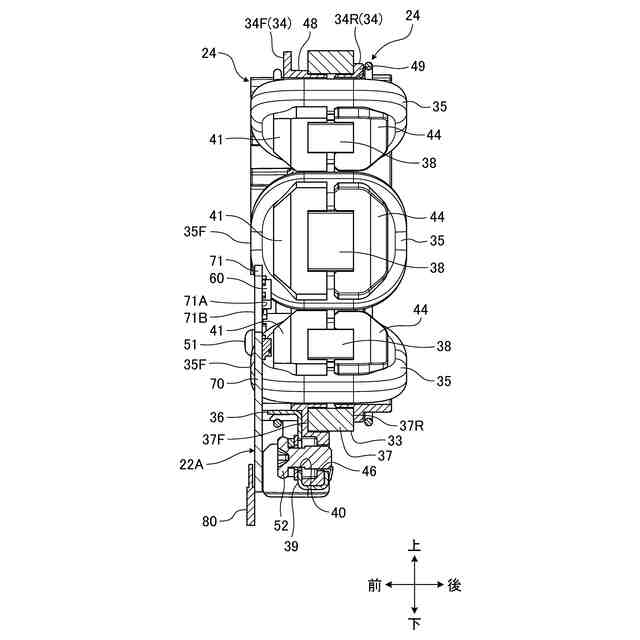
図8は、第1実施形態に係るステータ及びセンサ基板を示す断面図である。
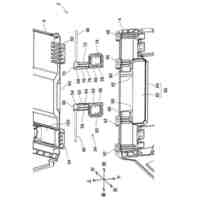
図9は、第1実施形態に係るステータ及びセンサ基板を示す前方からの分解斜視図である。
図10は、第2実施形態に係るステータ及びセンサ基板を前方から視た図である。
図11は、第2実施形態に係るステータを前方から視た図である。
図12は、第2実施形態に係るステータ及びセンサ基板を左方から視た図である。
図13は、第2実施形態に係るステータ及びセンサ基板を示す断面図である。
図14は、第3実施形態に係るステータ及びセンサ基板を前方から視た図である。
図15は、第3実施形態に係るステータを前方から視た図である。
図16は、第3実施形態に係るステータ及びセンサ基板を左方から視た図である。
図17は、第3実施形態に係るステータ及びセンサ基板を示す断面図である。
図18は、第3実施形態に係るステータ及びセンサ基板を示す前方からの分解斜視図である。
図19は、第3実施形態に係るステータ及びセンサ基板を示す断面図である。
図20は、第4実施形態に係るステータ及びセンサ基板を前方から視た図である。
図21は、第4実施形態に係るステータを前方から視た図である。
図22は、第4実施形態に係るステータ及びセンサ基板を左方から視た図である。
図23は、第4実施形態に係るステータ及びセンサ基板を示す断面図である。
図24は、第5実施形態に係るステータ及びセンサ基板を前方から視た図である。
図25は、第5実施形態に係るステータ及びセンサ基板を左方から視た図である。
図26は、第5実施形態に係るステータ及びセンサ基板を示す断面図である。
図27は、第6実施形態に係るステータ及びセンサ基板を前方から視た図である。
図28は、第6実施形態に係るステータ及びセンサ基板を左方から視た図である。
図29は、第6実施形態に係るステータ及びセンサ基板を示す断面図である。
図30は、第7実施形態に係るステータ及びセンサ基板を前方から視た図である。
図31は、第7実施形態に係るステータ及びセンサ基板を左方から視た図である。
図32は、第7実施形態に係るステータ及びセンサ基板を示す断面図である。
図33は、第8実施形態に係るステータ及びセンサ基板を前方から視た図である。
図34は、第8実施形態に係るステータ及びセンサ基板を左方から視た図である。
図35は、第8実施形態に係るステータ及びセンサ基板を示す断面図である。
図36は、第9実施形態に係るステータ及びセンサ基板を前方から視た図である。
図37は、第10実施形態に係る対向面及び逆向面とコイルの前端部との関係を説明するための図である。
図38は、第11実施形態に係るステータ及びセンサ基板を前方から視た図である。
図39は、第11実施形態に係るステータ及びセンサ基板を示す前方からの分解斜視図である。
図40は、第11実施形態に係るステータ及びセンサ基板を示す断面図である。
図41は、第11実施形態に係るセンサ基板の被覆部で覆われた部分を示した斜視図である。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、電動作業機は、回転軸を中心に回転するロータと、ロータの周囲に配置されるステータと、を有するモータと、ロータの回転を検出する回転センサと、回転センサを支持するプレートと、を有するセンサ基板と、を備えてもよい。ステータは、ロータの周囲に配置されるステータコアと、ステータコアに固定されるインシュレータと、インシュレータに固定され、周方向に間隔をあけて配置される複数のコイルと、を有してもよい。プレートは、回転軸の周囲の一部に配置され、軸方向のロータの端面と対向する対向面を有する円弧部と、円弧部から径方向外側に突出し、インシュレータに固定される少なくとも2つのアーム部と、を有してもよい。回転センサは、対向面に配置されてもよい。
【0010】
上記の構成では、センサ基板のプレートの一部が円弧部なので、センサ基板が小型化及び軽量化される。インシュレータに固定されるプレートの一部がアーム部なので、センサ基板が小型化及び軽量化される。センサ基板が小型化及び軽量化されることにより、モータとセンサ基板とを含むモータアセンブリが小型化及び軽量化される。これにより、電動作業機が小型化及び軽量化される。また、長方形状の1枚のプリント配線板(PWB:Printed Wiring Board)から多数のプレートが製造される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電気機器
3日前
株式会社マキタ
電動工具
23日前
株式会社マキタ
電気機器
3日前
株式会社マキタ
マルノコ
17日前
株式会社マキタ
打撃工具
3日前
株式会社マキタ
集じん機
12日前
株式会社マキタ
電動作業機
3日前
株式会社マキタ
打ち込み工具
19日前
株式会社マキタ
打ち込み工具
19日前
株式会社マキタ
打ち込み工具
19日前
株式会社マキタ
ベルトサンダ
18日前
株式会社マキタ
携帯用切断機
10日前
株式会社マキタ
背負式ブロワ
2日前
株式会社マキタ
フレア形成工具
3日前
株式会社マキタ
携帯用バンドソー
3日前
株式会社マキタ
電気機器およびケース
3日前
株式会社マキタ
電気機器および運搬ケース
3日前
株式会社マキタ
電気機器および運搬ケース
3日前
株式会社マキタ
インパクト工具及びスピンドル
25日前
株式会社マキタ
フレア形成装置及びフレア形成工具
3日前
株式会社マキタ
フレア形成装置及びフレア形成工具
3日前
株式会社マキタ
充電システム、電源アダプタ、及び充電器
3日前
株式会社マキタ
鉄筋結束ロボット
16日前
キヤノン株式会社
電源装置
9日前
株式会社竹中工務店
避雷設備
9日前
トヨタ自動車株式会社
充電方法
2日前
新電元工業株式会社
充電装置
2日前
株式会社エスイー
上載物の支持装置
9日前
AGC株式会社
太陽電池モジュール
9日前
三菱電機株式会社
回転子および電動機
9日前
住友金属鉱山株式会社
遮熱装置
3日前
株式会社ジェイテクト
モータ装置
5日前
日産自動車株式会社
光電変換装置
9日前
株式会社ゲットクリーンエナジー
発電機
9日前
トヨタ自動車株式会社
充電システム
5日前
コーセル株式会社
電源装置及びその制御方法
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ