TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085288
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199061
出願日
2023-11-24
発明の名称
分析装置、分析方法およびプログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G06Q
50/04 20120101AFI20250529BHJP(計算;計数)
要約
【課題】ユーザが生産対象物の個体ごとの搬送状況を容易に確認可能な技術を提供する。
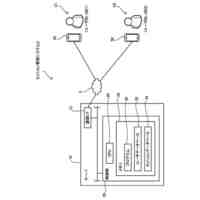
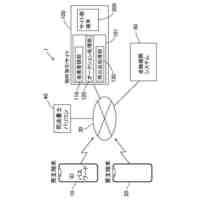
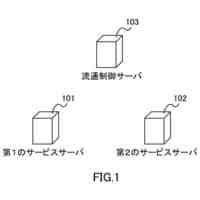
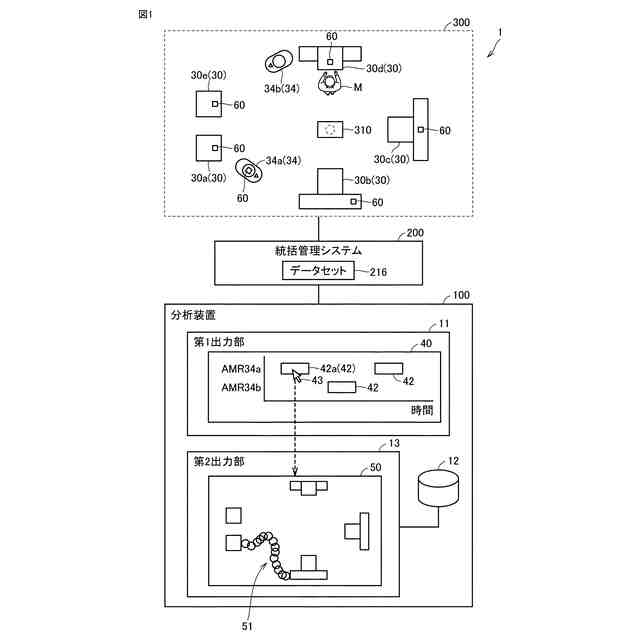
【解決手段】分析装置の第1出力部は、生産ラインの稼働状況を示すデータセットに基づいて、ワークの各個体に対する複数の処理の実施状況を表す第1画面を示す第1画面データを出力する。複数の処理は、ワークを搬送する1回以上の搬送処理を含む。第1画面は、ワークの個体ごとに、1回以上の搬送処理の搬送期間を表す1以上のシンボルを含む。分析装置の第2出力部は、対象シンボルが選択されたことに応じて、対象シンボルに対応する対象搬送期間における対象シンボルに対応する対象個体の第1軌跡を含む第2画面を示す第2画面データを出力する。
【選択図】図1
特許請求の範囲
【請求項1】
生産対象物に対して複数の処理を順に実施する生産ラインの稼働状況を分析する分析装置であって、
前記稼働状況を示すデータセットに基づいて、前記生産対象物の各個体に対する前記複数の処理の実施状況を表す第1画面を示す第1画面データを出力する第1出力部を備え、前記複数の処理は、前記生産対象物を搬送する1回以上の搬送処理を含み、前記第1画面は、前記生産対象物の個体ごとに、前記1回以上の搬送処理の搬送期間を表す1以上のシンボルを含み、前記分析装置は、さらに、
前記1以上のシンボルのうちの対象シンボルが選択されたことに応じて、前記生産対象物の各個体の前記搬送期間における時刻ごとの位置を示す位置情報に基づいて、前記対象シンボルに対応する対象搬送期間における前記対象シンボルに対応する対象個体の第1軌跡を含む第2画面を示す第2画面データを出力する第2出力部を備える、分析装置。
続きを表示(約 2,000 文字)
【請求項2】
前記データセットは、前記複数の処理が実施されている前記生産対象物の個体を識別する第1データを含み、
前記第1出力部は、前記第1データに基づいて、前記生産対象物の個体に応じて前記1以上のシンボルの表示形式を決定する、請求項1に記載の分析装置。
【請求項3】
前記第2画面において、前記第1軌跡は、前記生産ラインを撮影することにより得られる画像の上に重ねて表示される、請求項1に記載の分析装置。
【請求項4】
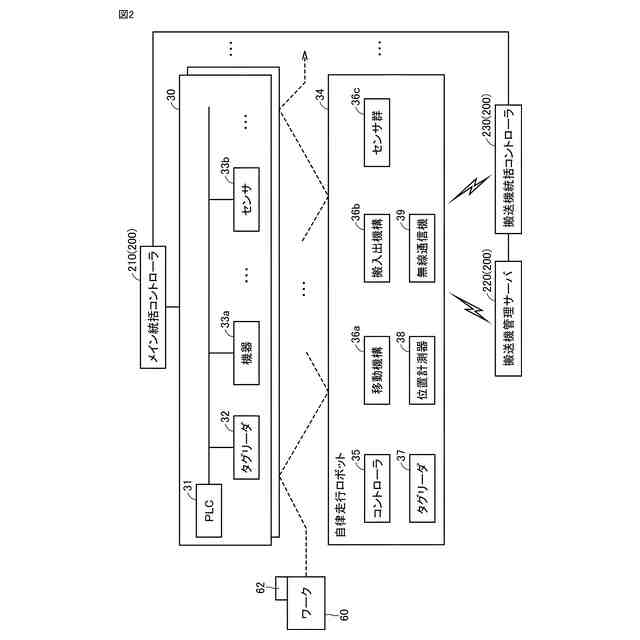
前記生産ラインは、前記生産対象物を搬送する第1自律移動ロボットを含み、
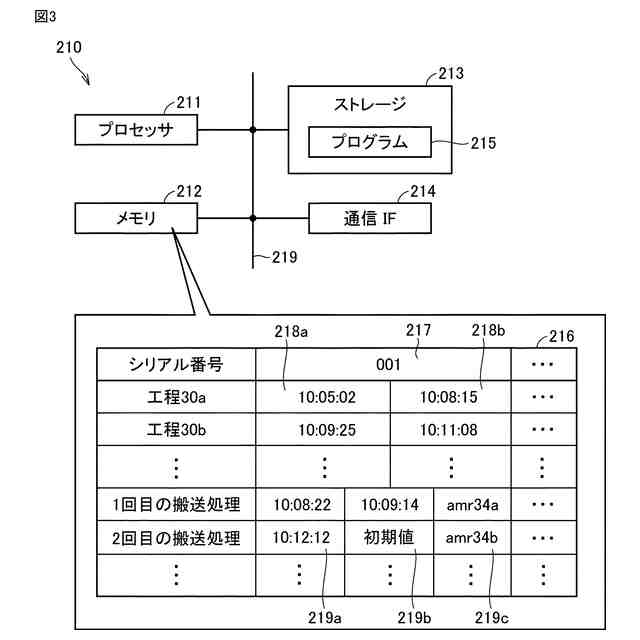
前記データセットは、前記第1自律移動ロボットに積載されている前記生産対象物の個体を識別する第1データと、前記第1自律移動ロボットによる前記生産対象物の搬送開始時刻を示す第2データと、前記第1自律移動ロボットによる前記生産対象物の搬送終了時刻を示す第3データと、を含み、
前記1以上のシンボルは、前記第1自律移動ロボットによる搬送に対応する1以上の第1シンボルを含み、
前記第1出力部は、前記第1データと前記第2データと前記第3データとに基づいて、前記1以上の第1シンボルを作成し、
前記位置情報は、前記生産対象物を搬送中の前記第1自律移動ロボットの時刻ごとの位置を前記生産対象物の位置として示す第1位置情報を含み、
前記第2出力部は、前記1以上の第1シンボルのうちの1つが前記対象シンボルとして選択されたことに応じて、前記第1位置情報に基づいて前記第1軌跡を作成する、請求項1に記載の分析装置。
【請求項5】
前記生産ラインは、前記生産対象物を搬送する第2自律移動ロボットをさらに含み、
前記第2出力部は、前記1以上の第1シンボルのうちの1つが前記対象シンボルとして選択されたことに応じて、前記第2自律移動ロボットの時刻ごとの位置を示す第2位置情報に基づいて、前記対象搬送期間における前記第2自律移動ロボットの第2軌跡を前記第2画面に含める、請求項4に記載の分析装置。
【請求項6】
前記第2出力部は、前記位置情報に基づいて、前記対象搬送期間における前記対象個体の移動に関する1以上のパラメータの値を算出し、
前記第2画面は、前記1以上のパラメータの値を表示する、請求項1から5のいずれか1項に記載の分析装置。
【請求項7】
前記第1出力部は、
前記1以上のシンボルのうちの第2シンボルが指定されたことに応じて、前記位置情報に基づいて、前記第2シンボルに対応する搬送期間における、前記第2シンボルに対応する個体の移動に関する1以上のパラメータの値を算出し、
前記第1画面は、前記1以上のパラメータの値を表示する、請求項1から5のいずれか1項に記載の分析装置。
【請求項8】
生産対象物に対して複数の処理を順に実施する生産ラインの稼働状況を分析する分析方法であって、
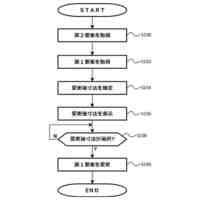
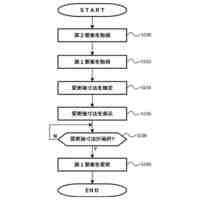
1以上のプロセッサが、前記稼働状況を示すデータセットに基づいて、前記生産対象物の各個体に対する前記複数の処理の実施状況を表す第1画面を示す第1画面データを出力することを備え、前記複数の処理は、前記生産対象物を搬送する1回以上の搬送処理を含み、前記第1画面は、前記生産対象物の個体ごとに、前記1回以上の搬送処理の搬送期間を表す1以上のシンボルを含み、前記分析方法は、さらに、
前記1以上のプロセッサが、前記1以上のシンボルのうちの対象シンボルが選択されたことに応じて、前記生産対象物の各個体の前記搬送期間における時刻ごとの位置を示す位置情報に基づいて、前記対象シンボルに対応する対象搬送期間における前記対象シンボルに対応する対象個体の第1軌跡を含む第2画面を示す第2画面データを出力することを備える、分析方法。
【請求項9】
生産対象物に対して複数の処理を順に実施する生産ラインの稼働状況を分析する分析方法をコンピュータに実行させるプログラムであって、
前記分析方法は、
前記稼働状況を示すデータセットに基づいて、前記生産対象物の各個体に対する前記複数の処理の実施状況を表す第1画面を示す第1画面データを出力することを備え、前記複数の処理は、前記生産対象物を搬送する1回以上の搬送処理を含み、前記第1画面は、前記生産対象物の個体ごとに、前記1回以上の搬送処理の搬送期間を表す1以上のシンボルを含み、前記分析方法は、さらに、
前記1以上のシンボルのうちの対象シンボルが選択されたことに応じて、前記生産対象物の各個体の前記搬送期間における時刻ごとの位置を示す位置情報に基づいて、前記対象シンボルに対応する対象搬送期間における前記対象シンボルに対応する対象個体の第1軌跡を含む第2画面を示す第2画面データを出力することを備える、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、分析装置、分析方法およびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
一般に、生産ラインにおいて、生産対象物は工程間で搬送される。生産対象物の搬送は、生産ラインの生産効率に影響を及ぼす。そのため、ユーザが生産対象物の搬送の状況を確認しやすい技術が望まれている。
【0003】
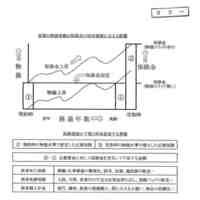
特開2019-191709号公報(特許文献1)は、搬送装置の稼働状況を分類し、分類された稼働状況ごとに搬送装置の移動経路を示す情報を出力する分析システムを開示している。搬送装置の稼働状況は、第1~第3分類に分類される。第1分類は、搬送装置が動いており、物品を保持していることを示す。第2分類は、搬送装置が動いており、物品を保持していないことを示す。第3分類は、搬送装置が動いていないことを示す。
【先行技術文献】
【特許文献】
【0004】
特開2019-191709号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
生産ラインでは、生産対象物の複数の個体が順次搬送される。ユーザは、特定の個体を搬送しているときの搬送状況を確認したいときがある。しかしながら、特許文献1に記載の技術では、第1~第3分類ごとに搬送装置の移動経路を示す情報が出力される。そのため、ユーザは、特定の個体を搬送しているときの搬送状況を確認したい場合、第1分類に対応する移動経路の中から当該特定の個体を搬送しているときの部分を特定する必要がある。すなわち、ユーザは、生産対象物の個体ごとの搬送状況を容易に確認できない。
【0006】
本開示は、上記の問題に鑑みてなされたものであり、その目的は、ユーザが生産対象物の個体ごとの搬送状況を容易に確認可能な分析装置、分析方法およびプログラムを提供することである。
【課題を解決するための手段】
【0007】
本開示の一例によれば、分析装置は、生産対象物に対して複数の処理を順に実施する生産ラインの稼働状況を分析する。分析装置は、第1出力部と、第2出力部とを備える。第1出力部は、稼働状況を示すデータセットに基づいて、生産対象物の各個体に対する複数の処理の実施状況を表す第1画面を示す第1画面データを出力する。複数の処理は、生産対象物を搬送する1回以上の搬送処理を含む。第1画面は、生産対象物の個体ごとに、1回以上の搬送処理の搬送期間を表す1以上のシンボルを含む。第2出力部は、1以上のシンボルのうちの対象シンボルが選択されたことに応じて、生産対象物の各個体の搬送期間における時刻ごとの位置を示す位置情報に基づいて、対象シンボルに対応する対象搬送期間における対象シンボルに対応する対象個体の第1軌跡を含む第2画面を示す第2画面データを出力する。
【0008】
この開示によれば、ユーザは、第1画面において搬送状況を確認したい対象シンボルを選択することにより、対象シンボルに対応する対象搬送期間における対象個体の第1軌跡を含む第2画面を確認できる。これにより、ユーザは、生産対象物の個体ごとの搬送状況を容易に確認できる。
【0009】
上述の開示において、データセットは、複数の処理が実施されている生産対象物の個体を識別する第1データを含む。第1出力部は、第1データに基づいて、生産対象物の個体に応じて1以上のシンボルの表示形式を決定する。
【0010】
この開示によれば、ユーザは、生産対象物のある個体の搬送期間を、他の個体の搬送期間と容易に区別できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
1か月前
個人
裁判のAI化
9日前
個人
情報処理装置
1か月前
個人
情報処理システム
16日前
個人
情報処理装置
1か月前
個人
検査システム
18日前
個人
記入設定プラグイン
1か月前
個人
設計支援システム
1日前
個人
設計支援システム
1日前
キヤノン電子株式会社
携帯装置
17日前
株式会社サタケ
籾摺・調製設備
17日前
個人
情報入力装置
1か月前
個人
不動産売買システム
24日前
株式会社カクシン
支援装置
4日前
個人
物価スライド機能付生命保険
1か月前
個人
備蓄品の管理方法
16日前
個人
マイホーム非電子入札システム
1か月前
キヤノン株式会社
情報処理装置
17日前
キヤノン株式会社
情報処理装置
17日前
サクサ株式会社
中継装置
17日前
株式会社BONNOU
管理装置
1か月前
東洋電装株式会社
操作装置
17日前
ホシデン株式会社
タッチ入力装置
24日前
株式会社ワコム
電子消去具
24日前
キヤノン電子株式会社
名刺管理システム
18日前
東洋電装株式会社
操作装置
17日前
アスエネ株式会社
排水量管理方法
17日前
株式会社東芝
電子機器
25日前
株式会社JVCケンウッド
管理装置
18日前
株式会社ライト
情報処理装置
1か月前
個人
パターン抽出方法及び通信多重化方法
23日前
日本電気株式会社
システム及び方法
3日前
個人
会話評価装置
1日前
大王製紙株式会社
RFIDタグ
23日前
住友重機械工業株式会社
力覚伝達装置
1か月前
株式会社CBE-A
情報処理システム
23日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ