TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025104803
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222882
出願日
2023-12-28
発明の名称
モータ制御装置、モータ制御方法、及びプログラム
出願人
株式会社安川電機
代理人
弁理士法人はるか国際特許事務所
主分類
G05B
11/36 20060101AFI20250703BHJP(制御;調整)
要約
【課題】応答性能を向上するモータ制御装置(1)を提供する。
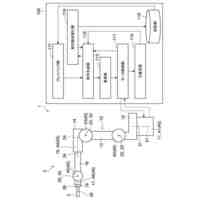
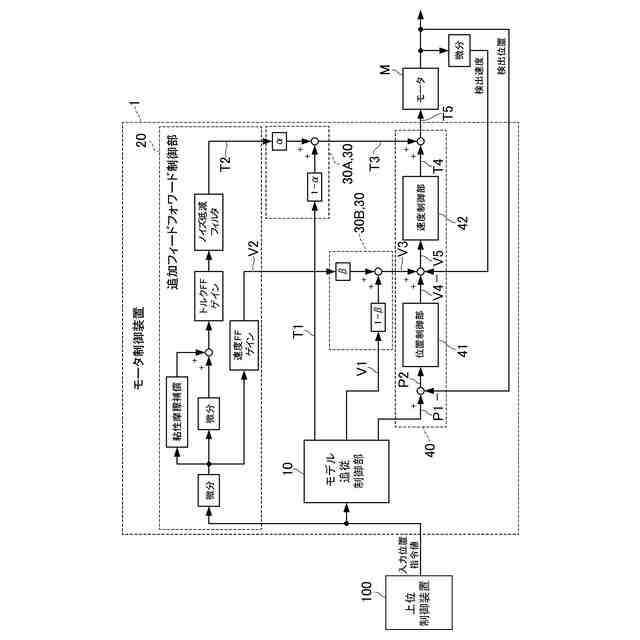
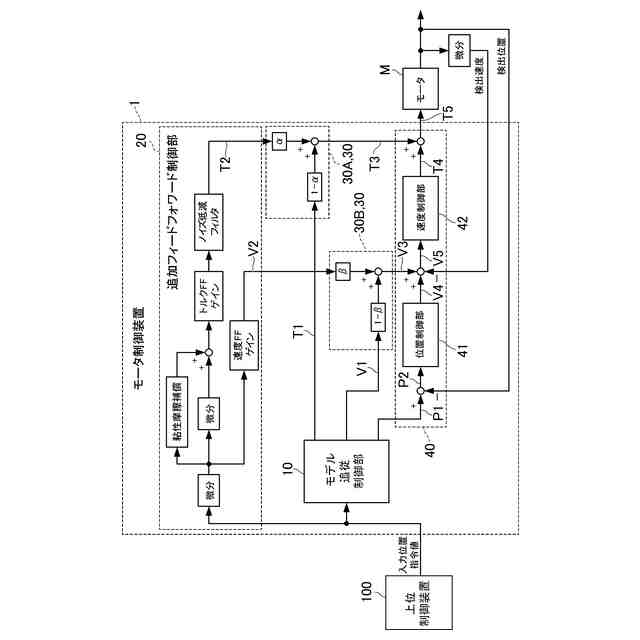
【解決手段】モータ制御装置(1)は、入力位置指令値に基づいて、モータを含む機器をモデル化した数式を計算することで第1の制御目標値を演算するモデル追従制御部(10)と、入力位置指令値の微分演算に基づいて第2の制御目標値を演算する追加フィードフォワード制御部(20)と、第1の制御目標値と第2の制御目標値とに基づいて合成制御目標値を生成する合成部(30)と、合成制御目標値に基づいてモータ(M)の駆動を制御する駆動制御部(40)と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
入力位置指令値に基づいて、モータを含む機器をモデル化した数式を計算することで第1の制御目標値を演算する第1の演算部と、
前記入力位置指令値の微分演算に基づいて第2の制御目標値を演算する第2の演算部と、
前記第1の制御目標値と前記第2の制御目標値とに基づいて合成制御目標値を生成する合成部と、
前記合成制御目標値に基づいて前記モータの駆動を制御する駆動制御部と、
を有するモータ制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記合成部は、前記第1の制御目標値と前記第2の制御目標値とを所与の割合で合成することにより前記合成制御目標値を生成する、
請求項1に記載のモータ制御装置。
【請求項3】
前記第1の制御目標値は、第1のトルク制御目標値を含み、
前記第2の制御目標値は、第2のトルク制御目標値を含み、
前記合成部は、前記第1のトルク制御目標値と前記第2のトルク制御目標値とを所与の割合で合成することで前記合成制御目標値である合成トルク制御目標値を生成し、
前記駆動制御部は、前記合成トルク制御目標値に基づいて前記モータを駆動させるためのトルク指令修正値を生成する、
請求項1に記載のモータ制御装置。
【請求項4】
前記第2の演算部は、
前記入力位置指令値の2階微分値と、前記入力位置指令値の1階微分値に所定の粘性摩擦係数を乗じて算出される粘性摩擦補償値と、に基づいて、前記第2のトルク制御目標値を演算する、
請求項3に記載のモータ制御装置。
【請求項5】
前記第1の制御目標値は、第1の速度制御目標値を含み、
前記第2の制御目標値は、第2の速度制御目標値を含み、
前記合成部は、前記第1の速度制御目標値と前記第2の速度制御目標値とを所与の割合で合成することで前記合成制御目標値である合成速度制御目標値を生成し、
前記駆動制御部は、前記合成速度制御目標値に基づいて前記モータの駆動を制御する、
請求項1に記載のモータ制御装置。
【請求項6】
入力位置指令値に基づいて、モータを含む機器をモデル化した数式を計算することで第1の制御目標値を演算し、
前記入力位置指令値の微分演算に基づいて第2の制御目標値を演算し、
前記第1の制御目標値と前記第2の制御目標値とに基づいて合成制御目標値を生成し、
前記合成制御目標値に基づいて前記モータの駆動を制御する、
モータ制御方法。
【請求項7】
入力位置指令値に基づいて、モータを含む機器をモデル化した数式を計算することで第1の制御目標値を演算する第1の演算部、
前記入力位置指令値の微分演算に基づいて第2の制御目標値を演算する第2の演算部、
前記第1の制御目標値と前記第2の制御目標値とに基づいて合成制御目標値を生成する合成部、
前記合成制御目標値に基づいて前記モータの駆動を制御する駆動制御部、
としてコンピュータを機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置、モータ制御方法、及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
下記特許文献1には、制御対象をモデル化した制御モデルに従った所謂モデル追従制御を用いて追従性を高める技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-151889号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
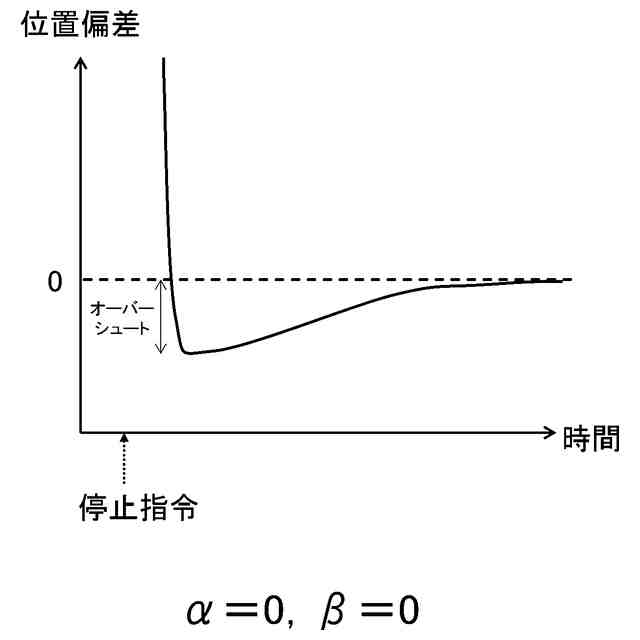
制御対象のモデル化の精度には限界があることより、制御対象であるモータに対する指令に遅れが生じてしまう場合がある。その結果、所謂オーバーシュート等が発生してしまう可能性がある。
【0005】
本発明は上記課題に鑑みてされたものであって、その目的は、応答性能を向上するモータ制御装置、モータ制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一側面に係るモータ制御装置は、入力位置指令値に基づいて、モータを含む機器をモデル化した数式を計算することで第1の制御目標値を演算する第1の演算部と、前記入力位置指令値の微分演算に基づいて第2の制御目標値を演算する第2の演算部と、前記第1の制御目標値と前記第2の制御目標値とに基づいて合成制御目標値を生成する合成部と、前記合成制御目標値に基づいて前記モータの駆動を制御する駆動制御部と、を有する。
【発明の効果】
【0007】
本開示によれば、応答性能を向上するモータ制御装置、モータ制御方法、及びプログラムを提供することができる。
【図面の簡単な説明】
【0008】
モータ制御装置の全体構成の一例を示す図である。
従来例のモータ制御装置の応答性能を説明するためのグラフである。
本実施形態に係るモータ制御装置の応答性能を説明するためのグラフである。
駆動制御部で実行される処理を示すフローチャートである。
モデル追従制御部及び追加フィードフォワード制御部で実行される処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
[モータ制御装置の概要]
従来のモデル追従制御では、上述のように、制御対象のモデル化の精度が十分でない場合があり、所謂オーバーシュートが発生してしまう場合があった。そこで、本実施形態に係るモータ制御装置1においては、モデル追従制御に対して、追加フィードフォワード制御に基づく修正を加えることで、応答性能を向上する構成を採用する。
【0010】
なお、モータMには不図示のエンコーダ等の位置検出センサが取り付けられており、位置検出センサによりモータMの検出位置(現在の回転位置)が取得されるとよい。また、検出位置の変化(1階微分値)に基づいて、検出速度(現在の回転速度)が取得されるとよい。そして、モータ制御装置1においては、モータMの検出位置が目標の回転位置まで回転したかどうかを判断しながら、目標の位置に近づくようフィードバックループによる駆動制御が行われる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社安川電機
ロボットシステム及び制御方法
27日前
株式会社安川電機
ロボットシステム及び制御方法
2か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
1か月前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
2か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
2か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
2か月前
株式会社安川電機
ロボットシステム、ロボット制御方法、およびロボット制御プログラム
27日前
株式会社安川電機
ロボットシステム及び制御方法
14日前
個人
生産早送り装置
22日前
株式会社豊田自動織機
産業車両
12日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
6日前
個人
作業車両自動化システム
28日前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送設備
2日前
トヨタ自動車株式会社
移動制御システム
22日前
トヨタ自動車株式会社
ペダル機構
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
26日前
トヨタ自動車株式会社
生産管理システム
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
9日前
マーク ヘイリー
消防ロボット
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ