TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099793
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216726
出願日
2023-12-22
発明の名称
ロボットシステム及び制御方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】より多様なモータ制御に有効なロボットシステムを提供する。
【解決手段】ロボットシステム1は、アーム10を動かす1以上のモータ40を有するロボットと、ロボットを制御する制御装置100と、を備え、制御装置100は、第1制御指令に第1制御量が追従するように、少なくとも1のモータを制御するモータ制御部111と、第1制御量を積分した第2制御量に応じて、第1制御指令を制限する指令生成部112と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
アームを動かす1以上のモータを有するロボットと、
前記ロボットを制御する制御装置と、
を備え、
前記制御装置は、
第1制御指令に第1制御量が追従するように、少なくとも1のモータを制御するモータ制御部と、
前記第1制御量を積分した第2制御量に応じて、前記第1制御指令を制限する指令生成部と、を有するロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
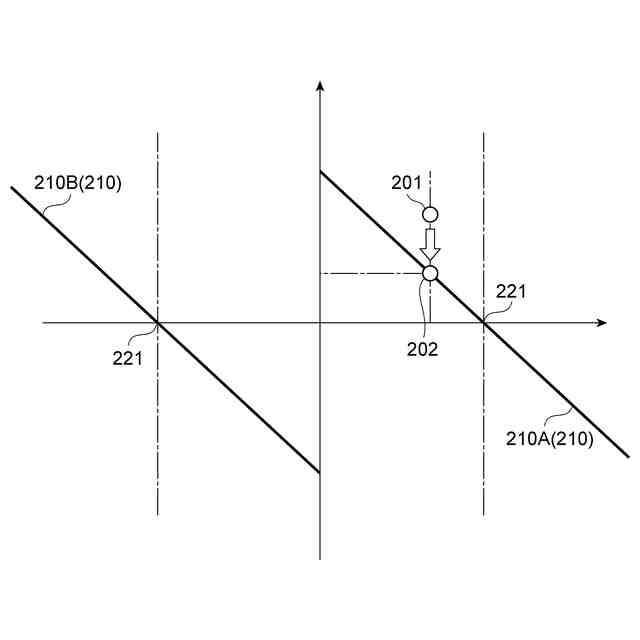
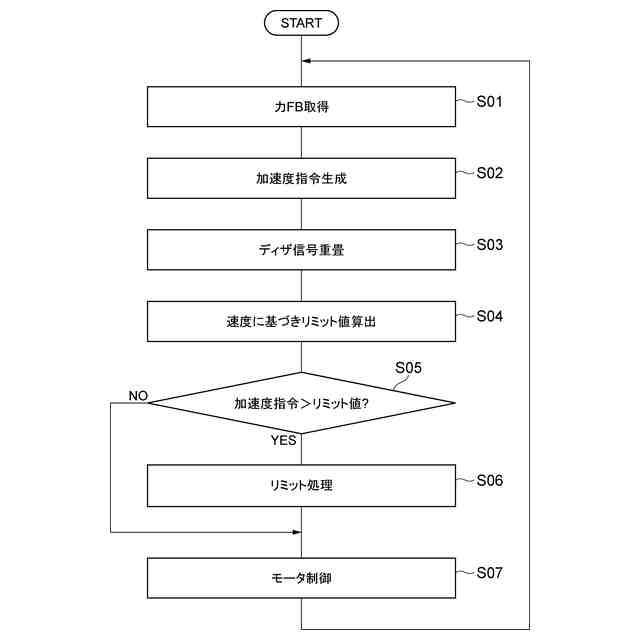
前記指令生成部は、前記第2制御量が大きくなると小さくなるリミット値を生成し、前記リミット値以下になるように前記第1制御指令を制限する、
請求項1記載のロボットシステム。
【請求項3】
前記モータ制御部は、前記第1制御指令としての加速度指令に、前記第1制御量としての加速度が追従するように、前記モータを制御し、
前記指令生成部は、
前記第2制御量としての速度が大きくなると小さくなる前記リミット値を生成し、
前記リミット値以下になるように前記加速度指令を制限する、
請求項2記載のロボットシステム。
【請求項4】
前記制御装置は、前記ロボットのアームの力を制御し、
前記指令生成部は、前記加速度指令を前記リミット値以下に制限しつつ、前記力が前記アームから出力されるように前記加速度指令を生成する、
請求項3記載のロボットシステム。
【請求項5】
前記制御装置は、前記アームに対してかけられた外力に応じて、前記外力が減少するように、前記力を制御する、
請求項4記載のロボットシステム。
【請求項6】
前記指令生成部が生成した前記加速度指令に対して、高周波のディザ信号を重畳する重畳部を更に備え、
前記モータ制御部は、前記ディザ信号が重畳した前記加速度指令に前記加速度が追従するように、前記モータを制御する、
請求項4記載のロボットシステム。
【請求項7】
前記ディザ信号が重畳した前記加速度指令と、前記加速度とに基づいて、前記アームに作用する力を推定する力推定部を更に備える、
請求項6記載のロボットシステム。
【請求項8】
前記アームの先端に取り付けられ、ワークに対して作用するエンドエフェクタを更に有し、
前記制御装置は、前記エンドエフェクタを前記ワークに押し付ける力を制御する、
請求項4~7のいずれか一項記載のロボットシステム。
【請求項9】
前記制御装置は、
前記ロボットに、
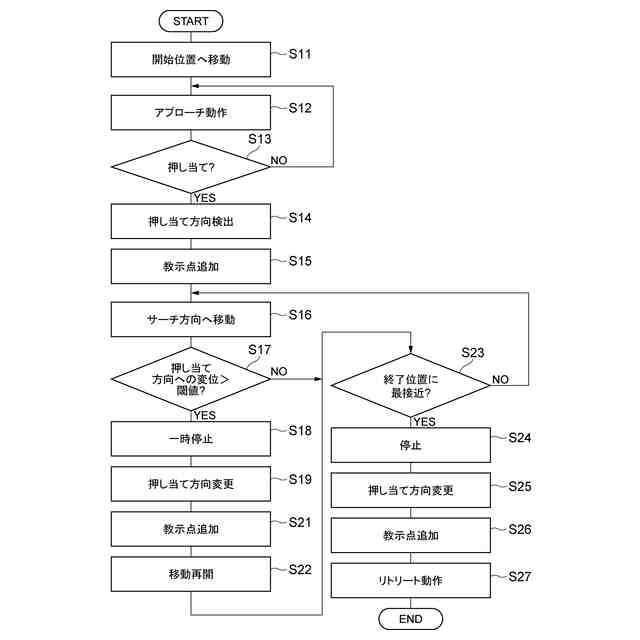
前記エンドエフェクタを、アプローチ方向に移動させて前記ワークに押し当てるアプローチ動作と、
前記エンドエフェクタを、押し当て方向に前記ワークに押し当てた状態で、前記押し当て方向と交差するサーチ方向に移動させるサーチ動作と、
を行わせる教示動作実行部と、
少なくとも前記サーチ動作における押し当て方向と、前記エンドエフェクタの位置とを倣い作業の教示データとして記憶する記憶部と、
を有し、
前記指令生成部は、少なくとも前記アプローチ動作において、前記加速度指令を前記リミット値以下に制限しつつ、前記ワークに押し当てる力が前記エンドエフェクタから出力されるように前記加速度指令を生成する、請求項8記載のロボットシステム。
【請求項10】
前記教示動作実行部は、所定の終了位置に前記エンドエフェクタが最も近付いた際に、前記サーチ動作の終了を判定する、
請求項9記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム及び制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、ロボットと対象物に作用する力を検出する力検出部と、ロボットの現在位置を検出する位置検出部と、位置検出部の位置座標に基づいてロボットの位置を制御する位置制御部と、力検出部により検出した力に基づいてロボットに与える力を制御する力制御部と、ロボットへ力・位置指令及び各種パラメータの転送を行う制御指令生成部と、ロボットと対象物の接点の法線ベクトルを算出し、かつ倣い座標系を算出する法線ベクトル算出部と、倣い座標系に沿ってロボットの移動方向ベクトルを算出する移動方向ベクトル算出部と、を備え、算出した倣い座標系に基づいて未知形状の曲面を持つ対象物の表面に、力制御部により一定の力を加えながら倣い動作を行う装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平03-184786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、より多様なモータ制御に有効なロボットシステムを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットシステムは、アームを動かす1以上のモータを有するロボットと、ロボットを制御する制御装置と、を備え、制御装置は、第1制御指令に第1制御量が追従するように、少なくとも1のモータを制御するモータ制御部と、第1制御量を積分した第2制御量に応じて、第1制御指令を制限する指令生成部と、を有する。
【0006】
本開示の他の側面に係る制御方法は、第1制御指令に第1制御量が追従するように、少なくとも1のモータを制御することと、第1制御量を積分した第2制御量に応じて、第1制御指令を制限することと、を含む。
【発明の効果】
【0007】
本開示によれば、より多様なモータ制御に有効なロボットシステムを提供することができる。
【図面の簡単な説明】
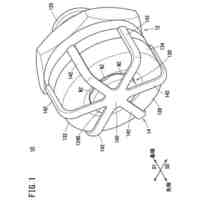
【0008】
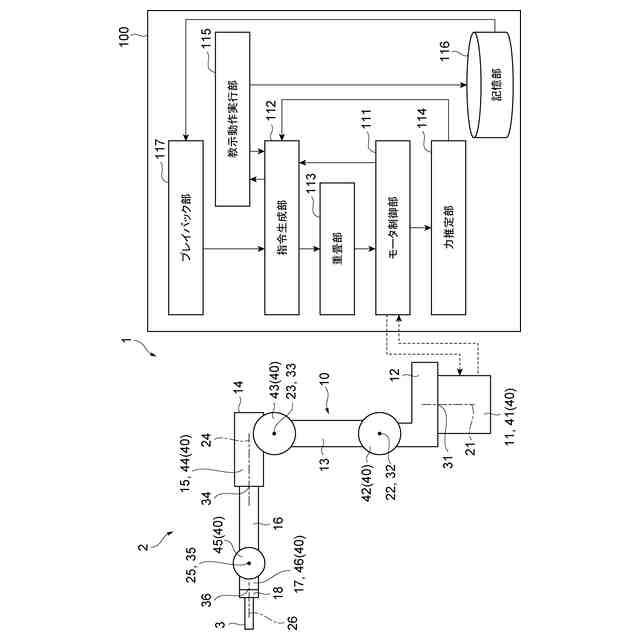
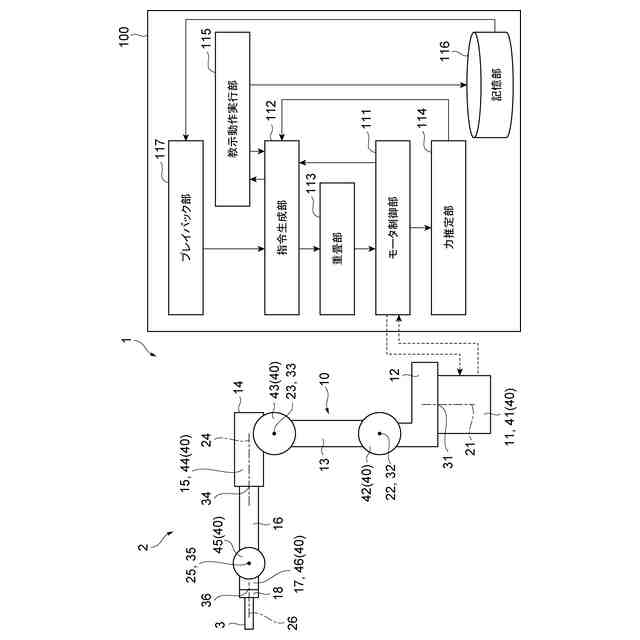
ロボットシステムの構成を例示する模式図である。
第2制御量が大きくなると小さくなるリミット値を例示するグラフである。
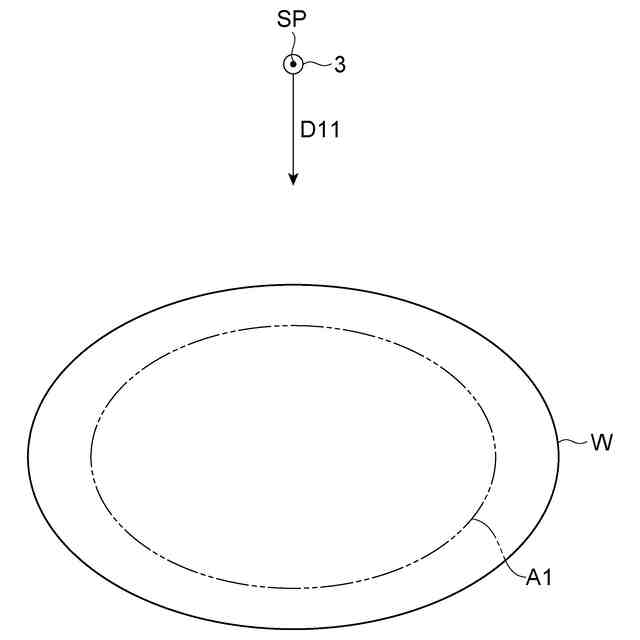
アプローチ動作を例示する模式図である。
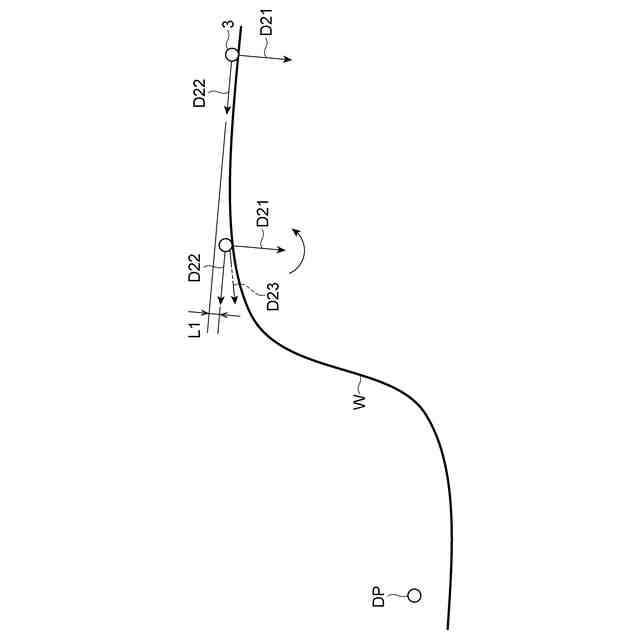
サーチ動作を例示する模式図である。
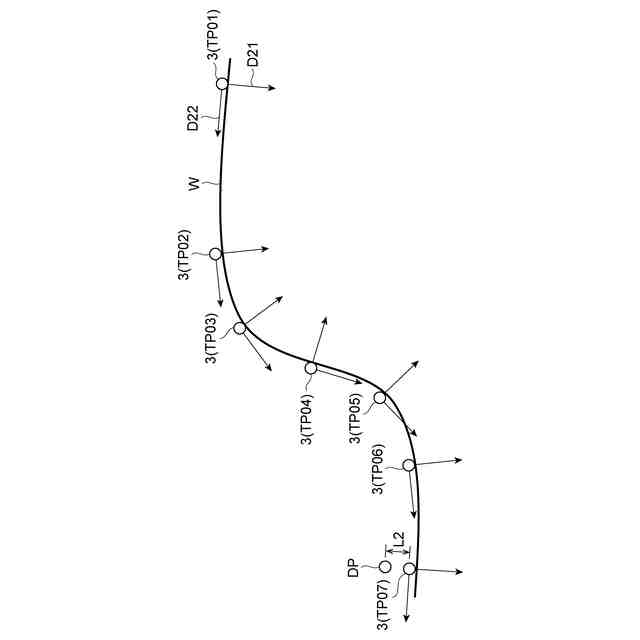
サーチ動作を例示する模式図である。
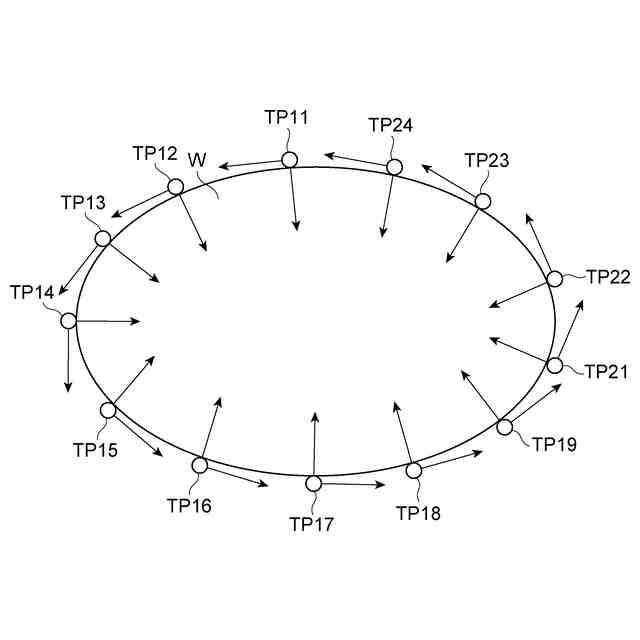
サーチ動作を例示する模式図である。
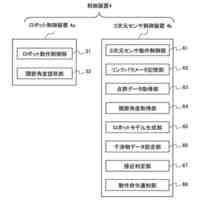
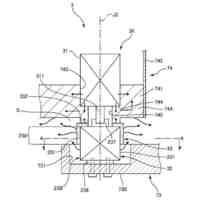
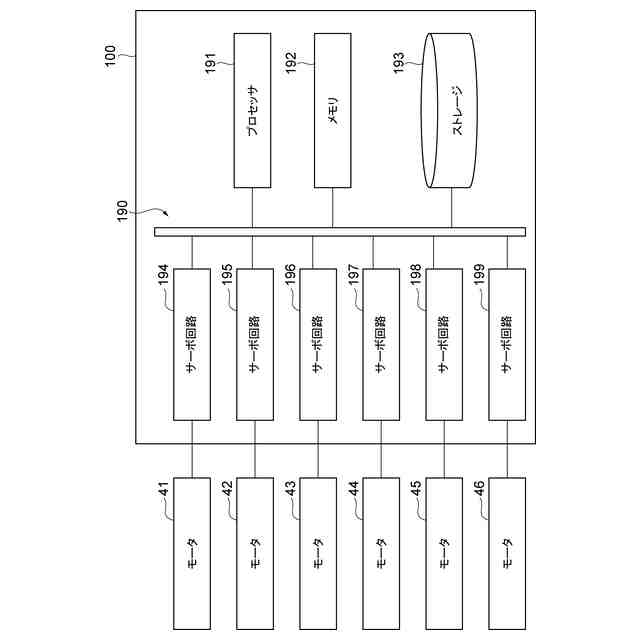
コントローラのハードウェア構成を例示するブロック図である。
モータ制御手順を例示するフローチャートである。
動作教示手順を例示するフローチャートである。
プレイバック制御手順を例示するフローチャートである。
他の動作教示手順を例示するフローチャートである。
ねじ締め制御手順を例示するフローチャートである。
【発明を実施するための形態】
【0009】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0010】
〔ロボットシステム〕
図1に示すロボットシステム1は、ワークに対する作業をロボット2に実行させるシステムである。ワークに対する作業の例としては、ワークの搬送、ワークに対する加工、ワークの組付け等が挙げられる。ワークに対する加工の例としては、ワークの研削、ワークの研磨等が挙げられる。ワークの組付けの例としては、ボルト締結等による複数の部品(ワークの部品)同士の締結、溶接による複数の部品同士の接合等が挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社安川電機
ロボットシステム及び制御方法
28日前
株式会社安川電機
ロボットシステム、ロボット制御方法、およびロボット制御プログラム
28日前
株式会社安川電機
ロボット及び基板搬送装置
今日
株式会社安川電機
ロボットシステム及び制御方法
15日前
個人
固定補助具
13日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
株式会社不二越
ロボット操作装置
1日前
住友重機械工業株式会社
教示装置
1か月前
株式会社不二越
ロボットシステム
7日前
株式会社ダイヘン
搬送装置
2か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
10日前
トヨタ自動車株式会社
カプラ接続治具
17日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
8日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
29日前
アピュアン株式会社
衝撃工具
2か月前
ホシデン株式会社
分解用治具
2か月前
株式会社不二越
協働ロボットシステム
1か月前
株式会社リコー
多関節ロボット
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
8日前
株式会社不二越
ロボットシステム
23日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
セイコーエプソン株式会社
ロボット
7日前
コネクテッドロボティクス株式会社
保持システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ