TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085540
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199492
出願日
2023-11-24
発明の名称
異常予兆検知装置、異常予兆検知システム、異常予兆検知方法及び異常予兆検知プログラム
出願人
ダイキン工業株式会社
,
アズビル株式会社
代理人
個人
,
個人
主分類
G05B
23/02 20060101AFI20250529BHJP(制御;調整)
要約
【課題】プラントにおける異常予兆の検知精度を向上させる。
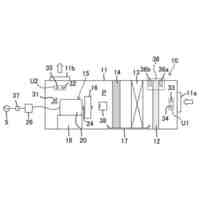
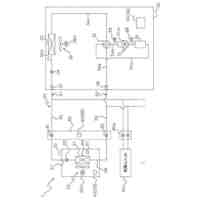
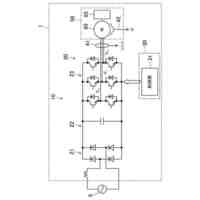
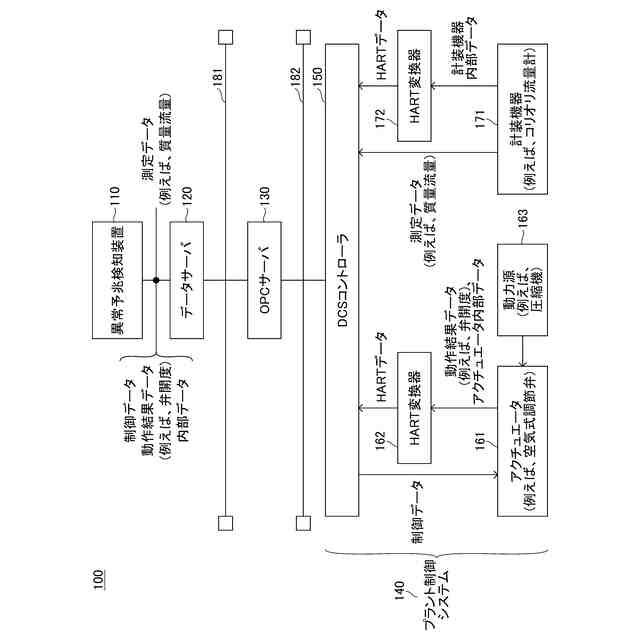
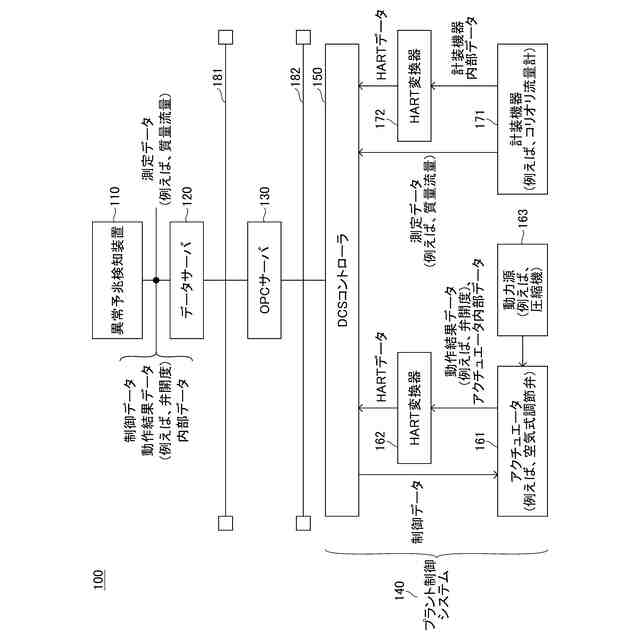
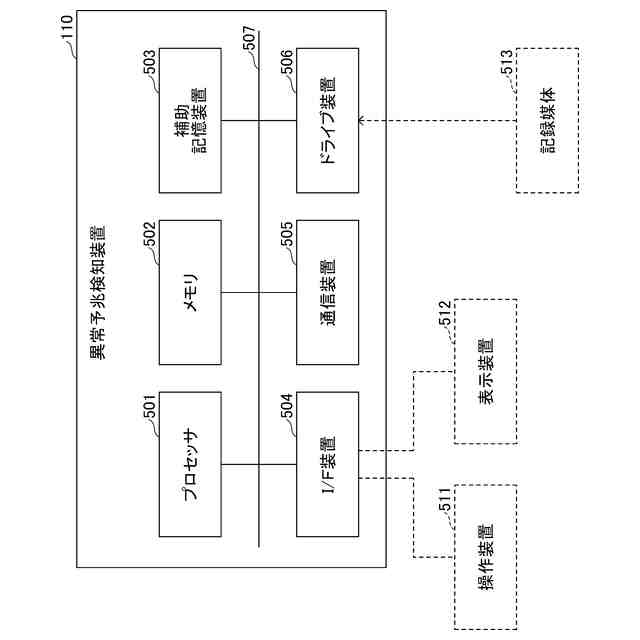
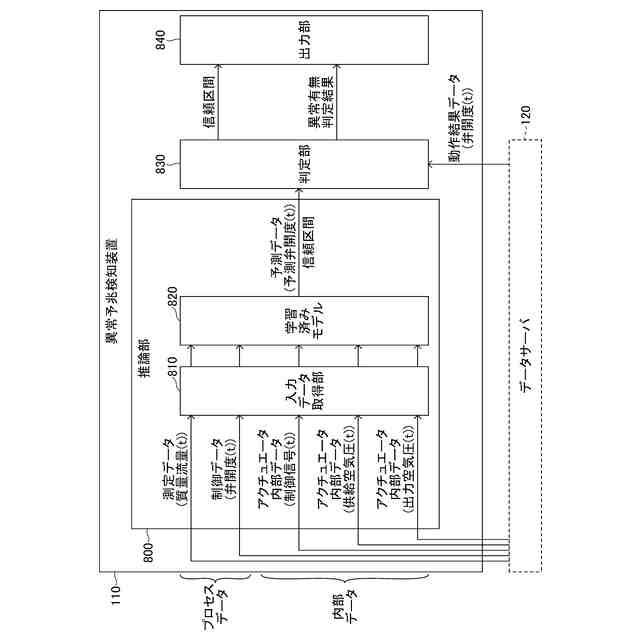
【解決手段】ローカル機器(161、171)とコントローラ(150)とを備えるプラント制御システム(140)と通信可能に接続され、プラントにおける異常予兆を検知する異常予兆検知装置(110)であって、前記異常予兆検知装置(110)が有する制御部(501、502)は、前記ローカル機器(161、171)の内部データと、前記コントローラ(150)のプロセスデータとを学習済みモデル(820、1620)に入力することで、前記学習済みモデル(820、1620)から出力される出力データと、前記プラントにおける監視対象のデータとに基づいて、前記ローカル機器(161、171)の異常予兆の有無を判定し、前記異常予兆の有無の判定結果を出力する。
【選択図】図1
特許請求の範囲
【請求項1】
ローカル機器(161、171)とコントローラ(150)とを備えるプラント制御システム(140)と通信可能に接続され、プラントにおける異常予兆を検知する異常予兆検知装置(110)であって、
前記異常予兆検知装置(110)が有する制御部(501、502)は、
前記ローカル機器(161、171)の内部データと、前記コントローラ(150)のプロセスデータとを学習済みモデル(820、1620)に入力することで、前記学習済みモデル(820、1620)から出力される出力データと、前記プラントにおける監視対象のデータとに基づいて、前記ローカル機器(161、171)の異常予兆の有無を判定し、
前記異常予兆の有無の判定結果を出力する、
異常予兆検知装置(110)。
続きを表示(約 1,600 文字)
【請求項2】
ローカル機器(161、171)とコントローラ(150)とを備えるプラント制御システム(140)と通信可能に接続され、プラントにおける異常予兆を検知する異常予兆検知装置(110)であって、
前記異常予兆検知装置(110)が有する制御部(501、502)は、
前記ローカル機器(161、171)の内部データと、前記コントローラ(150)のプロセスデータとを学習済みモデル(820、1620)に入力することで、前記学習済みモデル(820、1620)から出力される出力データと、前記プラントにおける監視対象のデータとに基づいて、前記プラントの異常予兆の有無を判定し、
前記異常予兆の有無の判定結果を出力する、
異常予兆検知装置(110)。
【請求項3】
前記監視対象のデータは、前記ローカル機器(161、171)から出力される出力データである、
請求項1または2に記載の異常予兆検知装置(110)。
【請求項4】
前記学習済みモデル(820、1620)は、
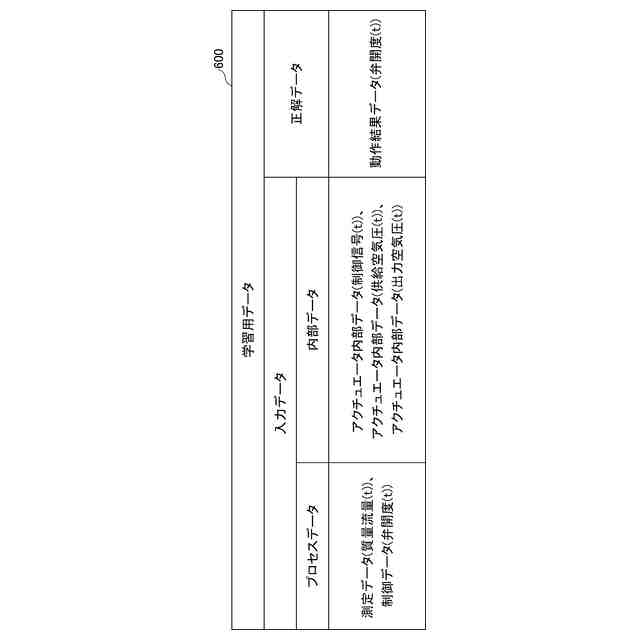
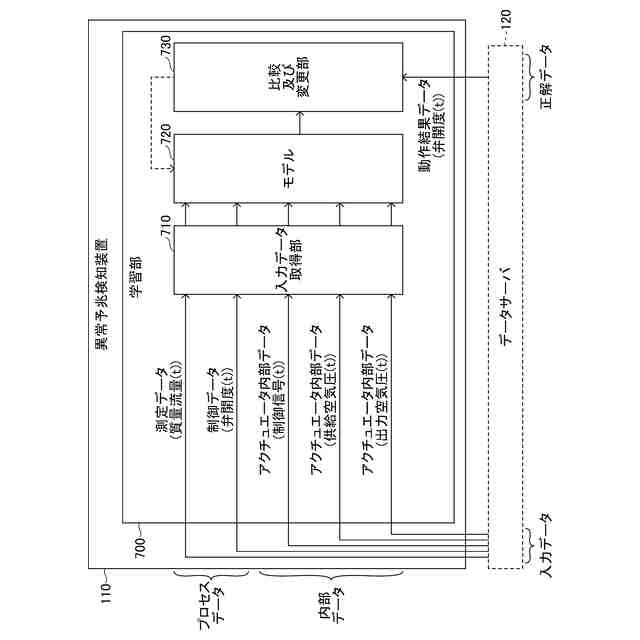
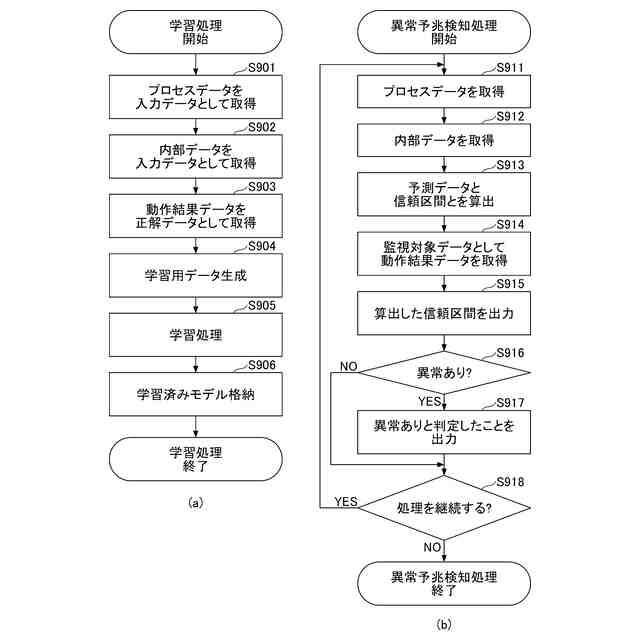
前記ローカル機器及び前記プラントが正常状態である場合の、前記ローカル機器(161、171)の内部データと、前記コントローラ(150)のプロセスデータと、前記ローカル機器(161、171)が出力する出力データとを含む学習用データ(600、1400)を用いて学習処理が行われることで生成される、
請求項3に記載の異常予兆検知装置(110)。
【請求項5】
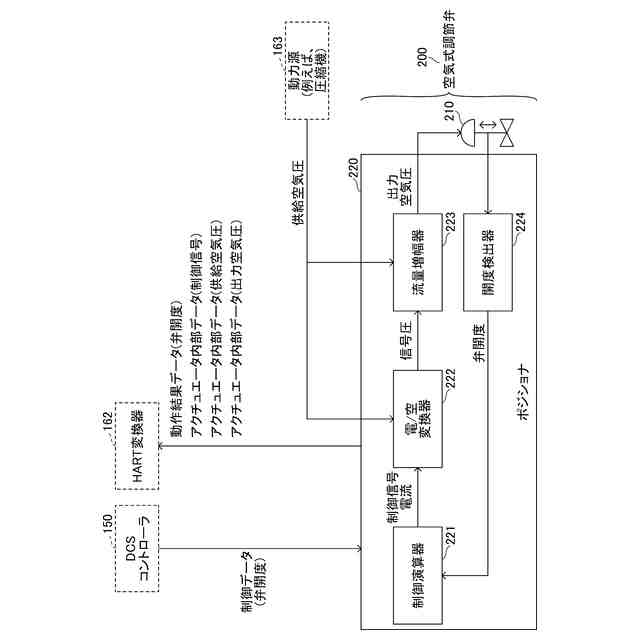
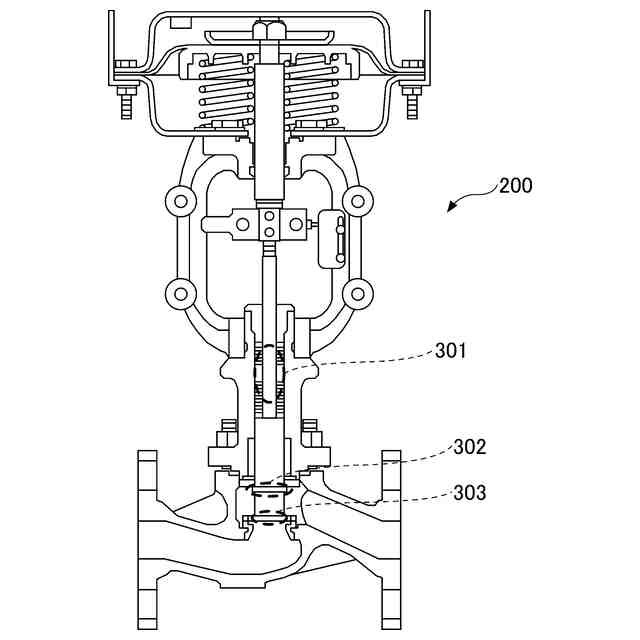
前記ローカル機器(161、171)は、前記プラントにおけるアクチュエータ(161)と、計装機器(171)とを含む、
請求項3に記載の異常予兆検知装置(110)。
【請求項6】
前記ローカル機器(161、171)がアクチュエータ(161)である場合、
前記プロセスデータは、
前記アクチュエータ(161)により制御され、前記計装機器(171)により測定された対象物の物理量を示すデータと、
前記コントローラ(150)が前記アクチュエータ(161)の動作を制御するための制御データと、
を含み、
前記監視対象のデータは、前記アクチュエータ(161)の動作結果を示すデータである、
請求項5に記載の異常予兆検知装置(110)。
【請求項7】
前記ローカル機器(161、171)が計装機器(171)である場合、
前記プロセスデータは、前記コントローラ(150)が前記アクチュエータ(161)の動作を制御するための制御データを含み、
前記監視対象のデータは、前記アクチュエータ(161)により制御され、前記計装機器(171)により測定される対象物の物理量を示すデータである、
請求項5に記載の異常予兆検知装置(110)。
【請求項8】
前記コントローラ(150)は、
前記ローカル機器(161、171)の内部データが、前記ローカル機器(161、171)から出力される出力データに対して重畳された重畳データを取得する、
請求項3に記載の異常予兆検知装置(110)。
【請求項9】
前記プラント制御システム(140)は、HART変換器(162、172)を有し、
前記重畳データは、HARTデータであり、前記コントローラ(150)は、前記ローカル機器(161、171)と接続された前記HART変換器(162、172)から、前記HARTデータを取得する、
請求項8に記載の異常予兆検知装置(110)。
【請求項10】
前記異常予兆検知装置(110)が有する制御部(501、502)は、
データサーバ(120)を介して、前記コントローラ(150)から前記プロセスデータを取得する、
請求項3に記載の異常予兆検知装置(110)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常予兆検知装置、異常予兆検知システム、異常予兆検知方法及び異常予兆検知プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
プラント内に設置された各種計装機器により測定され、プラントの制御及び監視に用いられるプロセスデータに基づいて、プラントにおける異常を検知する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/070656号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記技術の場合、プラント内の個々のローカル機器(例えば、調節弁等のアクチュエータ、流量計等の計装機器)の異常予兆や、プラント自体の異常予兆については、十分な検知精度が得られていない。なお、ここでいう「異常予兆」とは、異常が発生する前の状態であって、正常な状態からわずかに変化した状態を指す。
【0005】
本開示は、プラントにおける異常予兆の検知精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本開示の第1の態様は、
ローカル機器(161、171)とコントローラ(150)とを備えるプラント制御システム(140)と通信可能に接続され、プラントにおける異常予兆を検知する異常予兆検知装置(110)であって、
前記異常予兆検知装置(110)が有する制御部(501、502)は、
前記ローカル機器(161、171)の内部データと、前記コントローラ(150)のプロセスデータとを学習済みモデル(820、1620)に入力することで、前記学習済みモデル(820、1620)から出力される出力データと、前記プラントにおける監視対象のデータとに基づいて、前記ローカル機器(161、171)の異常予兆の有無を判定し、
前記異常予兆の有無の判定結果を出力する。
【0007】
本開示の第1の態様によれば、プラント内のローカル機器の異常予兆を検知する際の検知精度を向上させることができる。
【0008】
また、本開示の第2の態様は、
ローカル機器(161、171)とコントローラ(150)とを備えるプラント制御システム(140)と通信可能に接続され、プラントにおける異常予兆を検知する異常予兆検知装置(110)であって、
前記異常予兆検知装置(110)が有する制御部(501、502)は、
前記ローカル機器(161、171)の内部データと、前記コントローラ(150)のプロセスデータとを学習済みモデル(820、1620)に入力することで、前記学習済みモデル(820、1620)から出力される出力データと、前記プラントにおける監視対象のデータとに基づいて、前記プラント(1800、1900)の異常予兆の有無を判定し、
前記異常予兆の有無の判定結果を出力する。
【0009】
本開示の第2の態様によれば、プラント自体の異常予兆を検知する際の検知精度を向上させることができる。
【0010】
また、本開示の第3の態様は、第1または第2の態様に記載の異常予兆検知装置であって、
前記監視対象のデータは、前記ローカル機器(161、171)から出力される出力データである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ダイキン工業株式会社
耐油剤
2日前
ダイキン工業株式会社
給湯装置
25日前
ダイキン工業株式会社
巻線装置
2日前
ダイキン工業株式会社
耐油剤組成物
25日前
ダイキン工業株式会社
電力システム
6日前
ダイキン工業株式会社
機器制御システム
3日前
ダイキン工業株式会社
偏光感受型光干渉断層撮影装置
2日前
ダイキン工業株式会社
オイルセパレータ及び冷凍装置
9日前
ダイキン工業株式会社
積層体、その製造方法及び回路用基板
10日前
ダイキン工業株式会社
接続配管、冷凍装置、および接続配管の接続方法
2日前
ダイキン工業株式会社
異常判定システム、異常判定方法、およびプログラム
11日前
ダイキン工業株式会社
分離方法
6日前
ダイキン工業株式会社
表面処理剤
23日前
ダイキン工業株式会社
有機微粒子
4日前
ダイキン工業株式会社
電気化学デバイス、組成物、電極合剤、電極、及び、二次電池
3日前
ダイキン工業株式会社
含フッ素化合物
4日前
ダイキン工業株式会社
冷凍サイクル装置
11日前
ダイキン工業株式会社
電解液及び二次電池
16日前
ダイキン工業株式会社
電解液及び二次電池
16日前
ダイキン工業株式会社
水の処理方法および組成物
9日前
ダイキン工業株式会社
フッ素含有ポリマーの分解方法
6日前
ダイキン工業株式会社
熱交換器及び熱交換器の製造方法
16日前
ダイキン工業株式会社
熱源ユニット及び冷凍サイクル装置
16日前
ダイキン工業株式会社
ポリマー組成物、電気化学デバイス用バインダー、電極合剤、電極、及び、二次電池
3日前
ダイキン工業株式会社
加工助剤、マスターバッチ、熱可塑性樹脂組成物及び成形体、並びに、これらの製造方法
17日前
ダイキン工業株式会社
加工助剤、マスターバッチ、熱可塑性樹脂組成物及び成形体、並びに、これらの製造方法
17日前
ダイキン工業株式会社
加工助剤、マスターバッチ、熱可塑性樹脂組成物及び成形体、並びに、これらの製造方法
17日前
ダイキン工業株式会社
フルオロアルキル芳香族化合物の製造方法
23日前
ダイキン工業株式会社
熱可塑性樹脂組成物、成形体、熱可塑性樹脂組成物の製造方法及び熱可塑性樹脂組成物の評価方法
17日前
ダイキン工業株式会社
制御装置、冷凍システム、制御方法、制御プログラム
16日前
ダイキン工業株式会社
組成物、冷媒を保存する方法、及び冷媒の重合を抑制する方法
11日前
ダイキン工業株式会社
テトラフルオロエチレン系ポリマー組成物、電気化学デバイス用バインダー、電極合剤、電極、及び、二次電池
3日前
ダイキン工業株式会社
熱伝達流体用組成物、熱伝達機構を備えるデバイス及び熱伝達方法
23日前
ダイキン アメリカ インコーポレイティッド
コンポジットフルオロポリマーバインダー及びその製造方法、コンポジットバインダー材料及びその製造方法、電極、エネルギー貯蔵デバイス、電気化学デバイス用バインダー粉体及びその製造方法、電気化学デバイス用バインダー、電極合剤、二次電池用電極、並びに、二次電池
2日前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ