TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086722
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023200945
出願日
2023-11-28
発明の名称
締付工具用アタッチメント及び工具システム
出願人
パナソニック株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25B
21/00 20060101AFI20250602BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】締付工具と接続するだけで、締付作業のトレーサビリティの実現に寄与できる締付工具用アタッチメントを提供する。
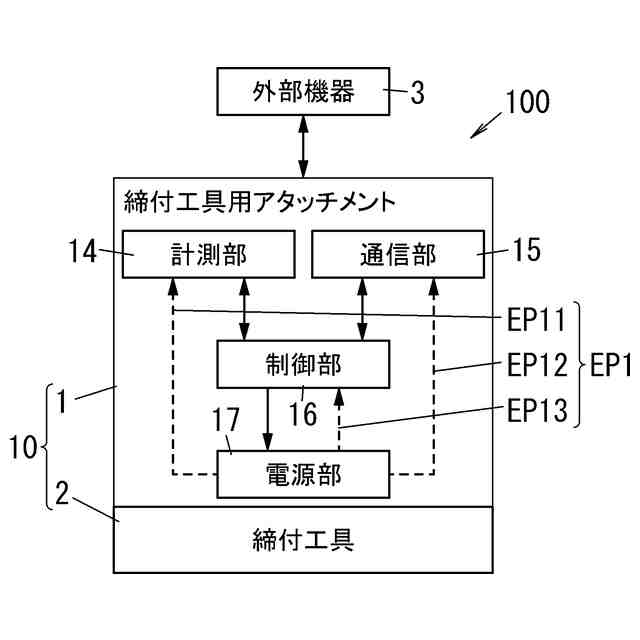
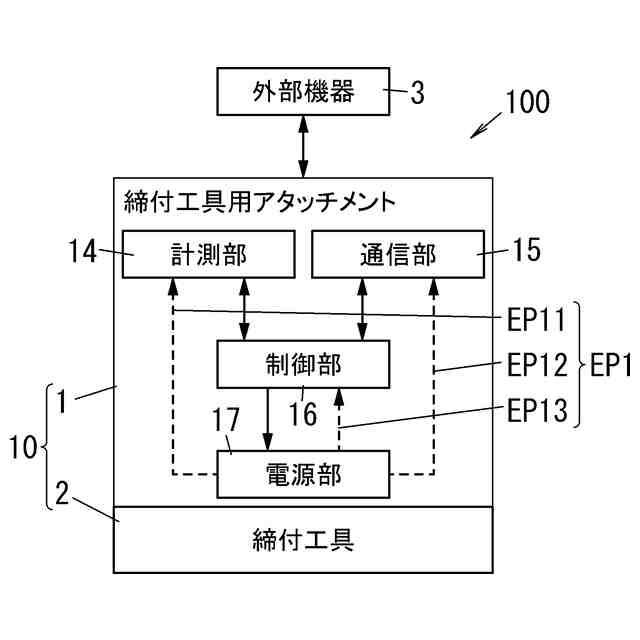
【解決手段】締付工具用アタッチメント1は、本体接続部とシャフトと計測部14と通信部15と制御部16と電源部17とを備える。本体接続部は、対象物の締め付けを行う締付工具2の工具本体と接続する。シャフトは、締付工具2の工具先端の動きと連動する。計測部14は、シャフトの締付トルクを計測する計測動作を行う。通信部15は、計測部14が計測した締付トルクの計測値を外部機器3に送信する送信動作を行う。制御部16は、計測動作を制御する計測制御動作及び送信動作を制御する送信制御動作を行う。電源部17は、計測部14、通信部15及び制御部16に電力EP1を供給する給電動作を行う。
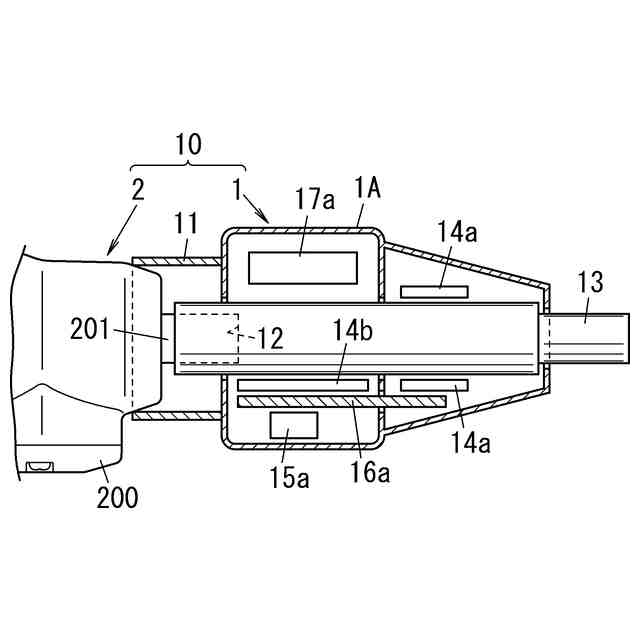
【選択図】図4
特許請求の範囲
【請求項1】
対象物の締め付けを行う締付工具の工具本体と接続する本体接続部と、
前記締付工具の工具先端の動きと連動するシャフトと、
前記シャフトの締付トルクを計測する計測動作を行う計測部と、
前記計測部が計測した前記締付トルクの計測値を外部機器に送信する送信動作を行う通信部と、
前記計測動作を制御する計測制御動作及び前記送信動作を制御する送信制御動作を行う制御部と、
前記計測部、前記通信部及び前記制御部に電力を供給する給電動作を行う電源部と、を備える、
締付工具用アタッチメント。
続きを表示(約 1,200 文字)
【請求項2】
前記締付工具の工具先端と接続する先端接続部を更に備え、
前記先端接続部が前記工具先端と接続することで、前記シャフトは前記工具先端と連動する、
請求項1に記載の締付工具用アタッチメント。
【請求項3】
前記シャフト、前記電源部、前記計測部、前記通信部及び前記制御部を収容する筐体、を更に備える、
請求項1に記載の締付工具用アタッチメント。
【請求項4】
前記筐体は、前記本体接続部を有する、
請求項3に記載の締付工具用アタッチメント。
【請求項5】
前記制御部は、プロセッサと、前記プロセッサを前記制御部として動作させるためのプログラムを格納するメモリと、を有する制御基板によって実現される、
請求項1に記載の締付工具用アタッチメント。
【請求項6】
前記制御部は、前記電源部の前記給電動作を条件に基づいて制御する給電制御動作を更に実行し、
前記通信部は、前記条件に関する情報を前記外部機器から受信する受信動作を更に行う、
請求項1に記載の締付工具用アタッチメント。
【請求項7】
前記条件は、前記給電動作の停止に関する停止条件を含み、
前記制御部は、前記停止条件に基づいて前記給電動作の少なくとも一部を停止させる停止制御動作を更に行う、
請求項6に記載の締付工具用アタッチメント。
【請求項8】
前記停止条件は、前記計測値が前記締付トルクの上限値に達したという前記条件を含み、
前記受信動作は、前記上限値を前記外部機器から受信する動作を含み、
前記制御部は、前記計測値が前記上限値に達した場合に前記停止制御動作を行う、
請求項7に記載の締付工具用アタッチメント。
【請求項9】
前記給電動作は、
前記計測部への給電を行う第1給電動作と、
前記通信部への給電を行う第2給電動作と、
前記制御部への給電を行う第3給電動作と、を含み、
前記停止制御動作は、
前記第1給電動作と、前記第2給電動作の少なくとも一部と、を停止させ、かつ
前記第3給電動作を継続させる動作である、
請求項7に記載の締付工具用アタッチメント。
【請求項10】
前記第2給電動作は、前記送信動作のための送信用電力の前記給電動作と前記受信動作のための受信用電力の前記給電動作とを含み、
前記停止制御動作は、
前記第1給電動作と、前記第2給電動作のうち前記送信用電力の前記給電動作と、を停止させ、かつ
前記第2給電動作のうち前記受信用電力の前記給電動作と、前記第3給電動作と、を継続させる動作である、
請求項9に記載の締付工具用アタッチメント。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、締付工具用アタッチメント及び工具システムに関し、より詳細には、締付工具に接続する締付工具用アタッチメント、及び締付工具用アタッチメントを備える工具システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、衝撃力を発生させる衝撃力発生部と、衝撃力によって回転する出力軸と、出力軸に加わるトルクを測定する第1測定部と、出力軸の円周方向の加速度及び角速度を測定する第2測定部と、第1測定部によるトルクの測定値並びに第2測定部による加速度の測定値及び角速度の測定値を用いて締付トルクを求めるトルク演算部と、を備えるインパクト回転工具が記載されている。このインパクト回転工具は、本体及び本体に着脱自在に取り付けられるケースを備え、本体は衝撃力発生部を、ケースは第1測定部、第2測定部及びトルク演算部を、それぞれ収納している。
【先行技術文献】
【特許文献】
【0003】
特開2015-66620号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のインパクト回転工具では、ケースを本体に装着することで、締付トルクをより正確に測定する機能が追加される。
【0005】
近年、締付工具での締付作業について、トレーサビリティ、すなわち締付工具での締付作業を追跡できる能力、の実現が求められている。
【0006】
本開示の目的は、締付工具と接続するだけで、締付作業のトレーサビリティの実現に寄与できる締付工具用アタッチメント、及びそのような締付工具用アタッチメントを備える工具システムを提供することである。
【課題を解決するための手段】
【0007】
本開示の一態様に係る締付工具用アタッチメントは、本体接続部とシャフトと計測部と通信部と制御部と電源部とを備える。前記本体接続部は、対象物の締め付けを行う締付工具の工具先端と接続する。前記シャフトは、前記締付工具の工具先端の動きと連動する。前記計測部は、前記シャフトの締付トルクを計測する計測動作を行う。前記通信部は、前記計測部が計測した前記締付トルクの計測値を外部機器に送信する送信動作を行う。前記制御部は、前記計測動作を制御する計測制御動作及び前記送信動作を制御する送信制御動作を行う。前記電源部は、前記計測部、前記通信部及び前記制御部に電力を供給する給電動作を行う。
【0008】
本開示の一態様に係る工具システムは、前記締付工具用アタッチメントと前記締付工具とを備える。
【発明の効果】
【0009】
本開示の締付工具用アタッチメント及び工具システムは、締付工具と接続するだけで、締付作業のトレーサビリティの実現に寄与できるという効果がある。
【図面の簡単な説明】
【0010】
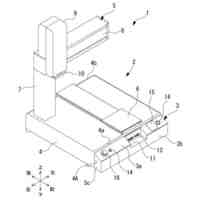
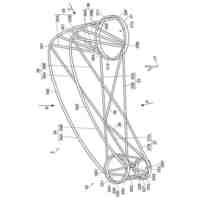
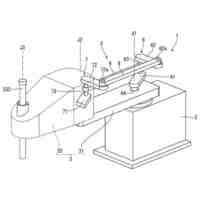
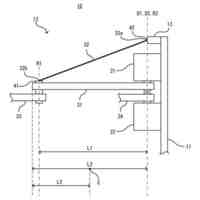
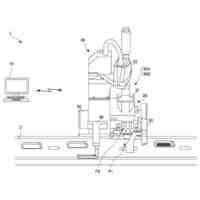
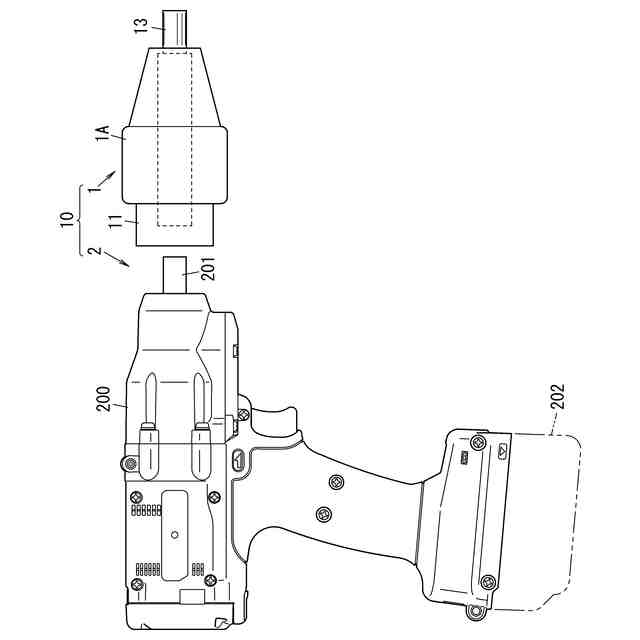
図1は、本開示の実施形態に係る工具システムの、締付工具用アタッチメントが締付工具と接続されていない非接続状態での外観、を示す外観図である。
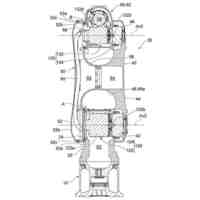
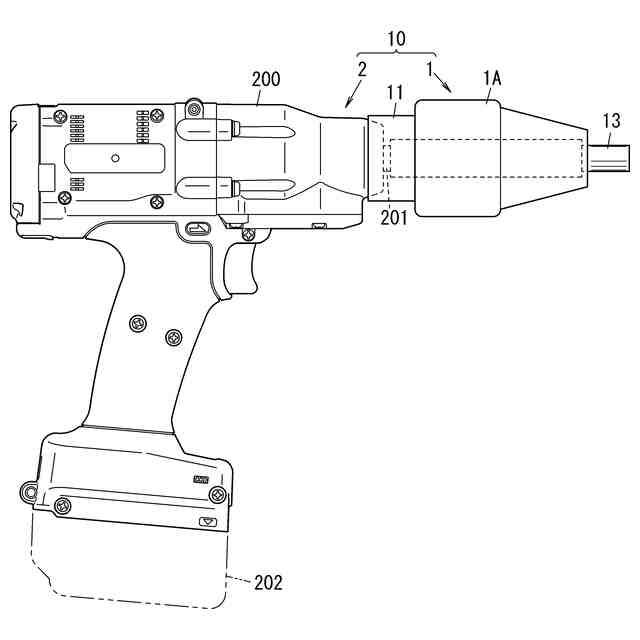
図2は、同上の工具システムの、締付工具用アタッチメントが締付工具と接続されている接続状態での外観、を示す外観図である。
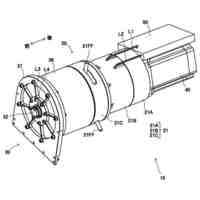
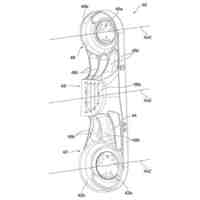
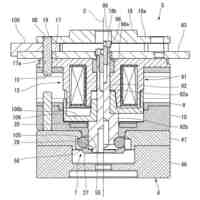
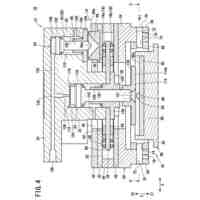
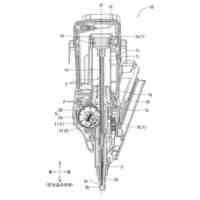
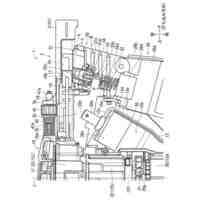
図3は、接続状態にある同上の工具システムにおいて、締付工具用アタッチメントの断面を模式的に示す断面図である。
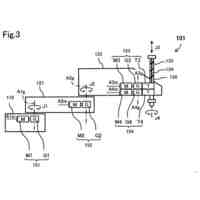
図4は、接続状態にある同上の工具システムと外部機器とを含むトレーサビリティシステムのブロック図である。
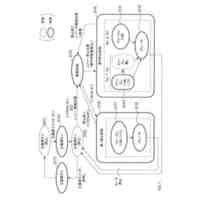
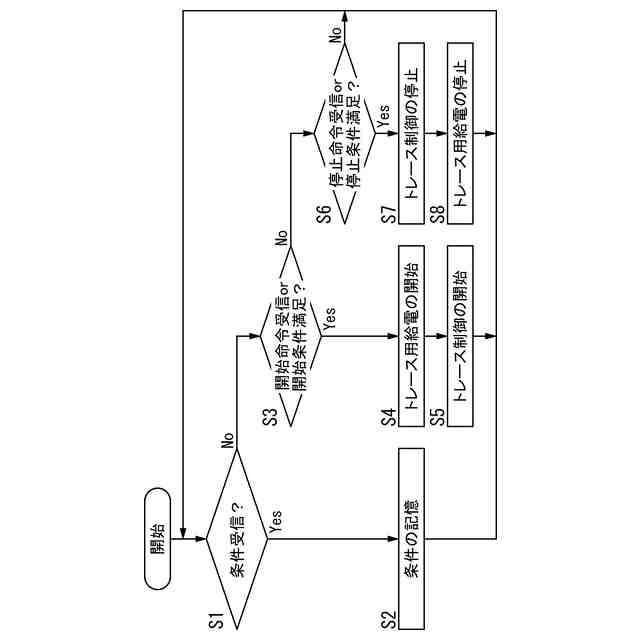
図5は、同上の締付工具用アタッチメントが備える制御部の動作を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
22日前
トヨタ自動車株式会社
関節機構
27日前
株式会社ダイヘン
移動体
25日前
株式会社スター精機
吸着パッド
21日前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
吸着パッド
21日前
学校法人五島育英会
アーム機構
27日前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
産業用ロボット
19日前
オークラ輸送機株式会社
ハンド装置
6日前
株式会社マキタ
電動作業機
28日前
株式会社マキタ
電動作業機
28日前
川崎重工業株式会社
ロボットシステム
7日前
株式会社リコー
多関節ロボット
26日前
株式会社ダイヘン
ロボット制御システム
25日前
株式会社安川電機
ロボット
19日前
株式会社ジャノメ
ロボット
15日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
セイコーエプソン株式会社
ロボット
21日前
小倉クラッチ株式会社
ロボット用ツール交換装置
21日前
セイコーエプソン株式会社
ロボット
1日前
株式会社マキタ
電動工具
5日前
株式会社マキタ
回転工具
8日前
オムロン株式会社
ロボット
18日前
オムロン株式会社
ロボット
18日前
個人
工具、工具セット、部材取外し方法
1日前
SMC株式会社
コンプライアンスユニット
12日前
オムロン株式会社
撮影システム
21日前
コネクテッドロボティクス株式会社
処理システム
22日前
株式会社マキタ
打ち込み工具
21日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
1日前
株式会社デンソーウェーブ
産業用ロボット及び吸着装置
21日前
セイコーエプソン株式会社
多関節ロボット
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ