TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100114
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023217235
出願日
2023-12-22
発明の名称
測距システム、測距方法およびプログラム
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
17/894 20200101AFI20250626BHJP(測定;試験)
要約
【課題】より精度の高い距離画像を生成可能とする。
【解決手段】二次元配列した複数の画素からの受光データが入力される入力部と、入力された前記受光データに基づき距離情報を取得する距離情報取得部と、を備え、前記複数の画素は、投光されるスポット光の直接反射光が入射する複数の直接画素と、投光されるスポット光の直接反射光の強度が前記直接画素における直接反射光の強度より小さい複数の間接画素と、を含み、前記複数の直接画素は、第1の直接画素と第2の直接画素と、を含む直接画素セットを含み、前記距離情報取得部は、前記直接画素の受光データと、前記直接画素セットに含まれる各々の直接画素で囲まれる位置にある複数の間接画素の中から選択された選択間接画素の受光データと、に基づき、距離情報を取得する。
【選択図】図7
特許請求の範囲
【請求項1】
対象物までの距離を示す距離情報を取得する測距システムであって、
二次元配列した複数の画素からの受光データが入力される入力部と、
入力された前記受光データに基づき距離情報を取得する距離情報取得部と、を備え、
前記複数の画素は、投光されるスポット光の直接反射光が入射する複数の直接画素と、投光されるスポット光の直接反射光の強度が前記直接画素における直接反射光の強度より小さい複数の間接画素と、を含み、
前記複数の直接画素は、第1の直接画素と第2の直接画素と、を含む直接画素セットを含み、
前記距離情報取得部は、前記直接画素の受光データと、前記直接画素セットに含まれる各々の直接画素で囲まれる位置にある複数の間接画素の中から選択された選択間接画素の受光データと、に基づき、前記直接画素の距離情報を取得する、測距システム。
続きを表示(約 1,000 文字)
【請求項2】
前記選択間接画素の位置は、前記直接画素セットに含まれる各々の直接画素から所定の画素数以上離れた位置である、請求項1に記載の測距システム。
【請求項3】
前記選択間接画素の位置は、第1の直接画素と第2の直接画素からなる線分の中点に隣接する位置である、請求項1に記載の測距システム。
【請求項4】
前記直接画素セットは第3の直接画素を含み、
前記選択間接画素の位置は、第1の直接画素、第2の直接画素及び第3の直接画素からなる三角形の中央に隣接する位置である、請求項1に記載の測距システム。
【請求項5】
前記距離情報取得部は、前記直接画素セットに含まれる各々の直接画素の受光データに基づき、前記選択間接画素を選択する、請求項1乃至請求項4のいずれか一項に記載の測距システム。
【請求項6】
前記第2の直接画素は、
前記第1の直接画素における距離と、前記第2の直接画素における距離の差が、
前記第1の直接画素における距離と、前記第1の直接画素および前記第2の直接画素と異なる直接画素における距離の差以下である、請求項1乃至請求項4のいずれか一項に記載の測距システム。
【請求項7】
前記直接画素セットは第3の直接画素を含み、
前記第3の直接画素は、
前記第2の直接画素における距離と、前記第3の直接画素における距離の差が、
前記第2の直接画素における距離と、前記第2の直接画素および前記第3の直接画素と異なる直接画素における距離の差以下である、請求項6に記載の測距システム。
【請求項8】
前記第1の直接画素に対応する第1の選択間接画素と、前記第2の直接画素に対応する第2の選択間接画素と、が異なる画素である、請求項1乃至請求項4のいずれか一項に記載の測距システム。
【請求項9】
前記第1の直接画素に対応する第1の選択間接画素と、前記第2の直接画素に対応する第2の選択間接画素と、が同じ画素である、請求項1乃至請求項4のいずれか一項に記載の測距システム。
【請求項10】
前記スポット光を投光する投光部と、
前記スポット光の反射光を受光する受光部と、
をさらに備える、請求項1乃至請求項4のいずれか一項に記載の測距システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測距システム、測距方法およびプログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、対象物までの測距の手法の一つに、ToF(Time of Flight)方式と呼ばれる測距方法が知られている。ToF方式を用いた測距装置であるToFカメラは、赤外光等の測距光を対象物に向けて照射した後、対象物によって反射された測距光をToFセンサで受光する。そして、ToFセンサで取得された情報に基づき、測距光の照射から受光までの遅延時間を画素ごとに取得し、距離を算出する。算出された距離値を画素ごとにビットマップ状に集めることで、“距離画像”が取得される。
【0003】
特許文献1には、シーンに光パターンを投影するToFカメラシステムが開示されている。間接成分が優位を占める光の飛行時間測定によって得られた複素データを、直接成分および間接成分の両方によって得られた複素データから減算して、新しい複素データを形成することによって、前記物体の奥行マップにおける前記間接成分の影響を除去することが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のToF方式を用いた測距装置によれば、間接成分を取得する画素の検討は行われておらず、マルチパス補正による測距精度の向上には改善の余地があった。
【0005】
本発明は、上記に鑑みてなされたものであって、より精度の高い距離画像を生成可能とすることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、二次元配列した複数の画素からの受光データが入力される入力部と、入力された前記受光データに基づき距離情報を取得する距離情報取得部と、を備え、前記複数の画素は、投光されるスポット光の直接反射光が入射する複数の直接画素と、投光されるスポット光の直接反射光の強度が前記直接画素における直接反射光の強度より小さい複数の間接画素と、を含み、前記複数の直接画素は、第1の直接画素と第2の直接画素と、を含む直接画素セットを含み、前記距離情報取得部は、前記直接画素の受光データと、前記直接画素セットに含まれる各々の直接画素で囲まれる位置にある複数の間接画素の中から選択された選択間接画素の受光データと、に基づき、距離情報を取得することを特徴とする。
【発明の効果】
【0007】
本発明によれば、対象物までの距離を示す距離情報を、より高精度に取得可能とすることができる、という効果を奏する。
【図面の簡単な説明】
【0008】
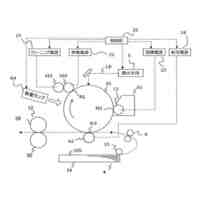
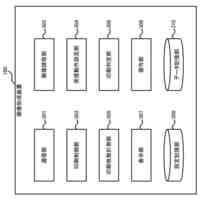
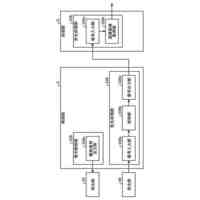
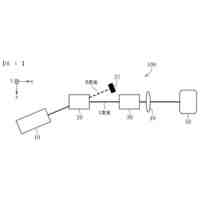
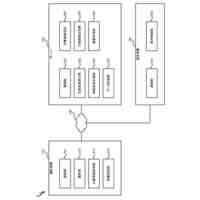
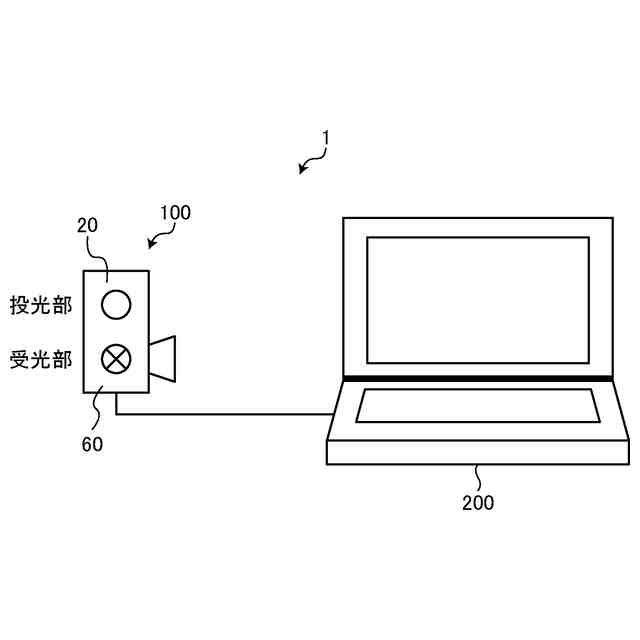
図1は、第1の実施の形態にかかる測距装置の全体構成を示すブロック図である。
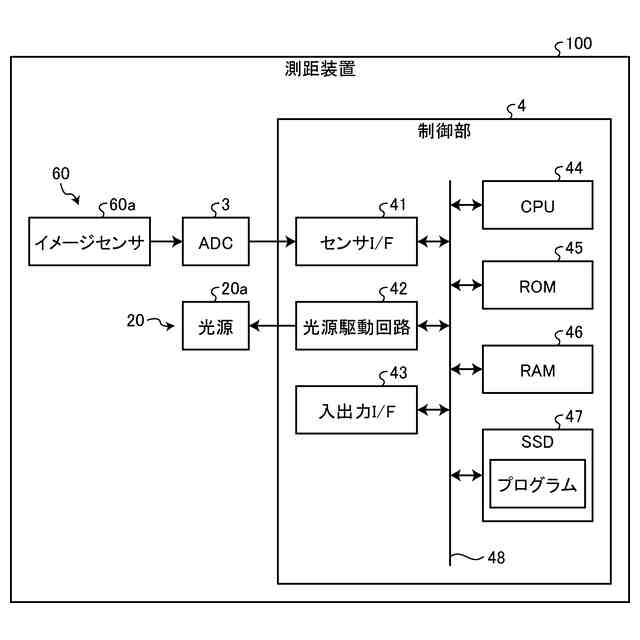
図2は、第1の実施の形態にかかる測距装置のハードウェア構成を示すブロック図である。
図3は、スポット光を例示的に示す図である。
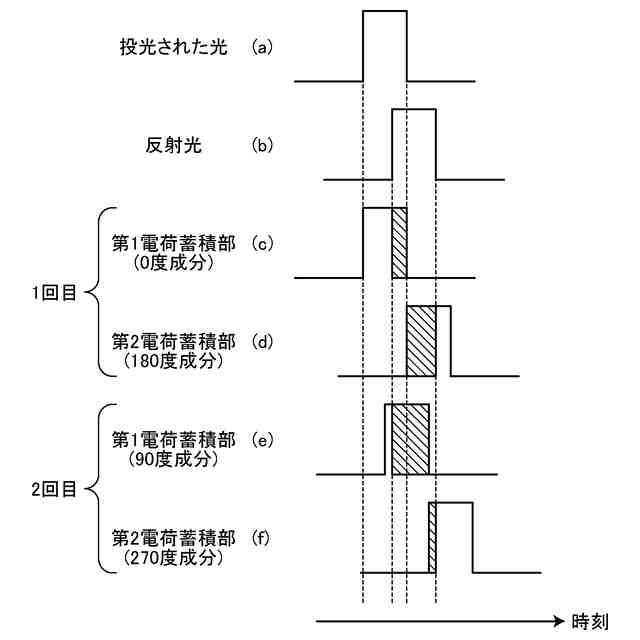
図4は、測距原理を説明するためのタイミングチャートである。
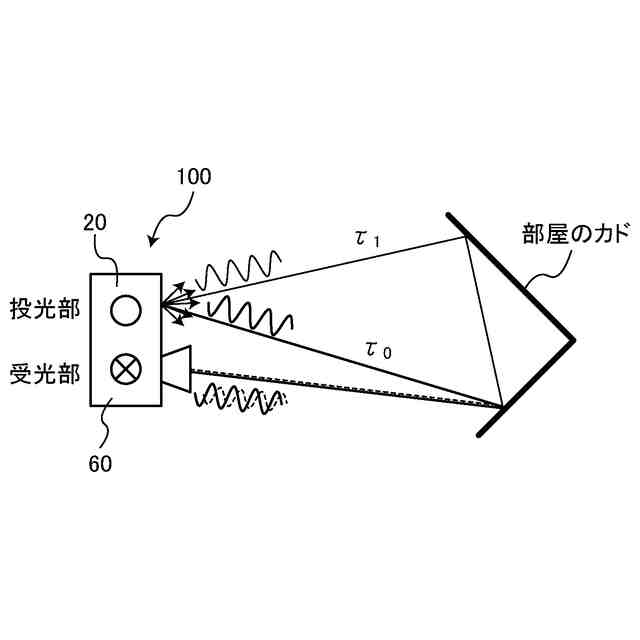
図5は、ToFカメラでマルチパス干渉によるノイズが発生する原理を示す図である。
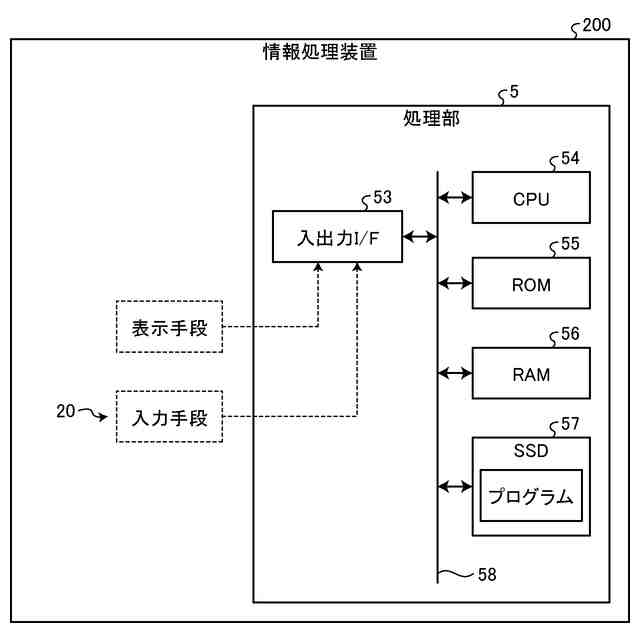
図6は、情報処理装置のハードウェア構成の一例を示す図である。
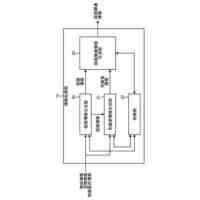
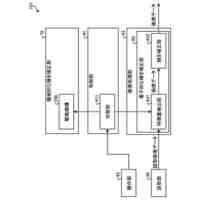
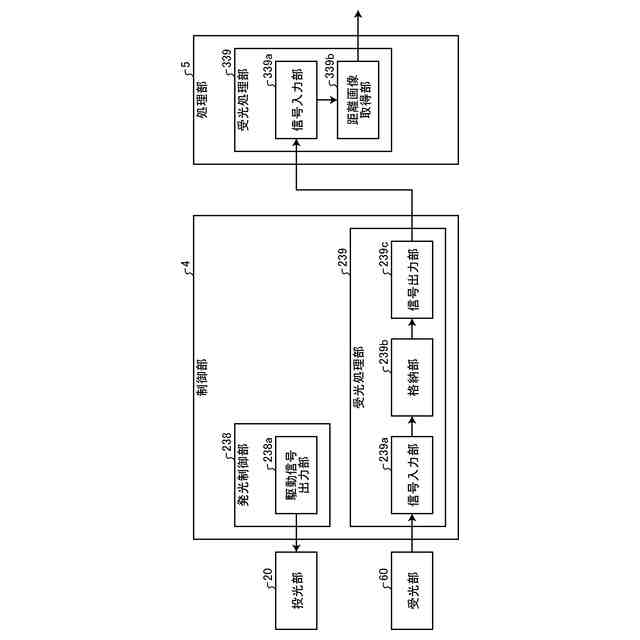
図7は、測距装置の制御部及び情報処理装置の処理部が有する機能の一例を示す図である。
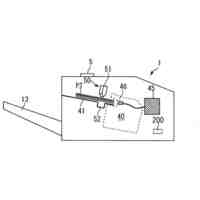
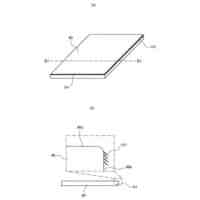
図8は、測距装置の投光系および受光系を示す図である。
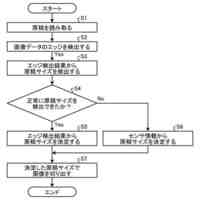
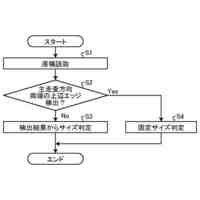
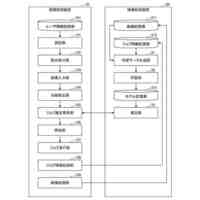
図9は、測距処理および距離情報算出処理の流れを示すフローチャートである。
図10は、位相信号の強度の例を示す図である。
図11は、スポット光の強度分布の例を示す図である。
図12は、スポット光の位置と、マルチパス光を測定する近傍点の例を示す図である。
図13は、測距装置から対象物までの距離が、場所によって大きく異なる例を示す図である。
図14は、処理部においてマルチパス測定位置を決定する手順の一例を示すフローチャートである。
図15は、スポット光の配置が四角形である例を示す図である。
図16は、隣り合うスポット光の強度分布の例を示す図である。
図17は、距離画像の例を示す図である。
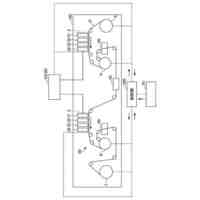
図18は、第2の実施の形態にかかる測距装置のハードウェア構成を示すブロック図である。
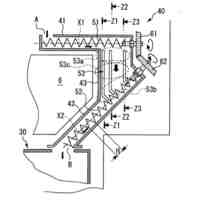
図19は、測距装置の投光系および受光系を示す図である。
図20は、スポット光の位置と、マルチパス光を測定する近傍点の例を示す図である。
図21は、第2の実施の形態の変形例にかかる測距装置のハードウェア構成を示すブロック図である。
図22は、測距装置の投光系および受光系を示す図である。
図23は、第2の実施の形態の他の変形例にかかる測距装置のハードウェア構成を示すブロック図である。
図24は、測距装置の投光系および受光系を示す図である。
図25は、測距装置の各光学要素の他の配置例を示す図である。
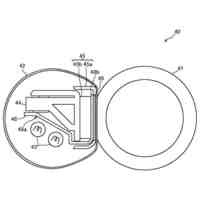
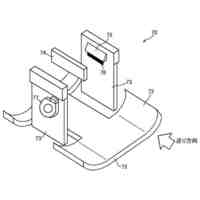
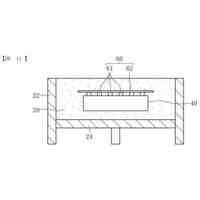
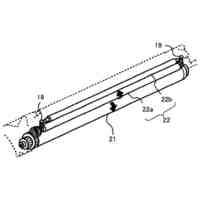
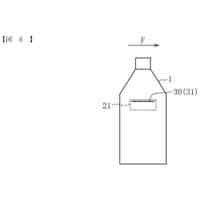
図26は、第3の実施の形態にかかる測距装置の構成を示す外観斜視図である。
図27は、測距装置の概略構成の一例を示す図である。
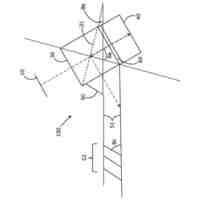
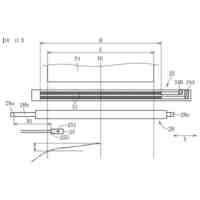
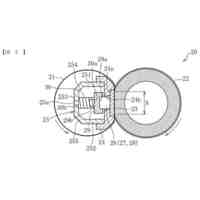
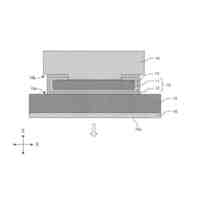
図28は、光学系の配置の一例を示す図である。
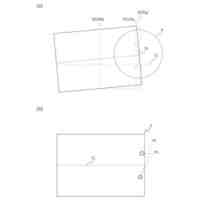
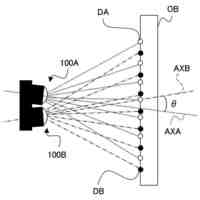
図29は、全天球撮像装置を適用した場合に特有のマルチパス干渉を例示的に示す図である。
図30は、全天球撮像装置を適用した場合にマルチパス干渉を低減する撮影シーケンスを示す図である。
図31は、第4の実施の形態に係る三次元形状生成システム6の構成を示すブロック図である。
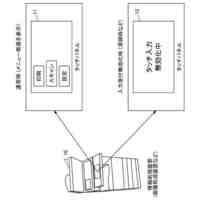
図32は、測距システムを、使用者の認証を行う電子情報端末に適用した例を示す図である。
図33は、測距システムを、自立走行システムに適用した例を示す図である。
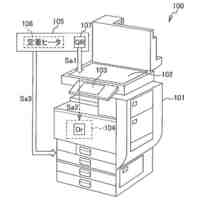
図34は、測距システムを、物品検査システムに適用した例を示す図である。
図35は、測距システムを、稼働機器に適用した例を示す図である。
図36は、測距システムを、運転支援システムに適用した例を示す図である。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、測距システム、測距方法およびプログラムの実施の形態を詳細に説明する。
【0010】
(第1の実施の形態)
図1は、第1の実施の形態に係る測距システムの全体構成図である。本実施形態の測距システム1は、投受光装置100及び情報処理装置200によって構築されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
25日前
株式会社リコー
インクセット
17日前
株式会社リコー
多関節ロボット
3日前
株式会社リコー
光学系及び表示装置
18日前
株式会社リコー
定着装置及び画像形成装置
12日前
株式会社リコー
情報処理装置、情報表示方法
6日前
株式会社リコー
シート給送装置及び画像形成装置
18日前
株式会社リコー
液体吐出装置、及び画像形成装置
25日前
株式会社リコー
加熱装置、定着装置、画像形成装置
18日前
株式会社リコー
シート処理装置及び画像形成システム
11日前
株式会社リコー
画像形成装置、方法およびプログラム
3日前
株式会社リコー
後処理装置、及び、画像形成システム
3日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
6日前
株式会社リコー
トナー搬送装置、及び、画像形成装置
10日前
株式会社リコー
造形方法、造形システム及びプログラム
5日前
株式会社リコー
測距システム、測距方法およびプログラム
3日前
株式会社リコー
投光装置、投受光装置および測距システム
17日前
株式会社リコー
画像処理装置、画像処理方法、プログラム
5日前
株式会社リコー
情報処理装置、情報処理方法およびプログラム
17日前
株式会社リコー
レーザ照射装置、被加工物及びレーザ照射方法
24日前
株式会社リコー
画像処理装置、画像処理システム及びプログラム
17日前
株式会社リコー
読取装置、画像処理装置、読取方法およびプログラム
12日前
株式会社リコー
読取装置、画像処理装置、読取方法およびプログラム
12日前
株式会社リコー
読取装置、画像処理装置、読取方法およびプログラム
10日前
株式会社リコー
情報処理装置、情報処理プログラム、及び情報処理方法
17日前
株式会社リコー
情報処理装置、通信システム、情報処理方法及びプログラム
10日前
株式会社リコー
液体吐出ヘッド、液体吐出ユニット及び液体を吐出する装置
19日前
株式会社リコー
画像形成装置、画像定着装置、情報処理方法、及びプログラム
10日前
株式会社リコー
クリーニング装置、プロセスカートリッジおよび画像形成装置
3日前
株式会社リコー
情報処理システム、画像処理装置、情報処理方法及びプログラム
6日前
株式会社リコー
電極の製造方法、複合電極、電気化学素子、及び電極の製造装置
25日前
株式会社リコー
位置決め調整機構、位置決め調整システム、及び充電ステーション
10日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法およびプログラム
3日前
株式会社リコー
液体を吐出する装置
10日前
株式会社リコー
レーザ照射装置、レーザ照射方法、レーザ照射システム及び被加工物
3日前
株式会社リコー
画像形成装置、画像形成装置の制御方法及び画像形成装置の制御プログラム
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ