TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101129
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217748
出願日
2023-12-25
発明の名称
分注方法および分注システム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01N
35/10 20060101AFI20250630BHJP(測定;試験)
要約
【課題】高い精度の分注を行うことのできる分注方法および分注システムを提供すること。
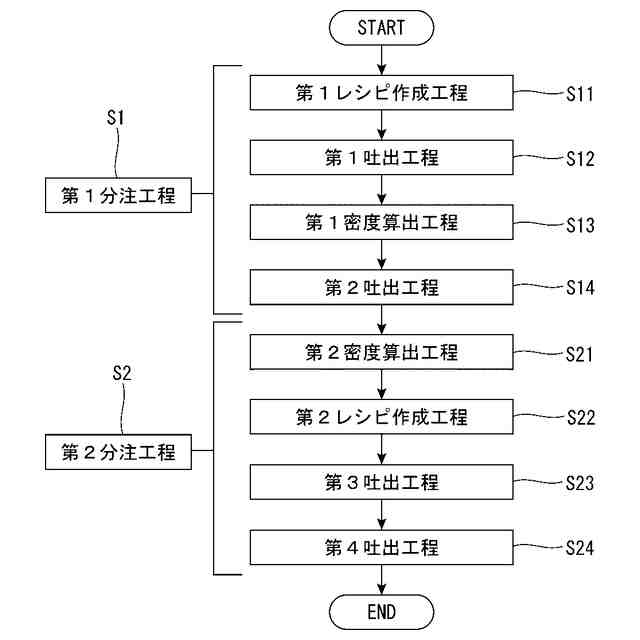
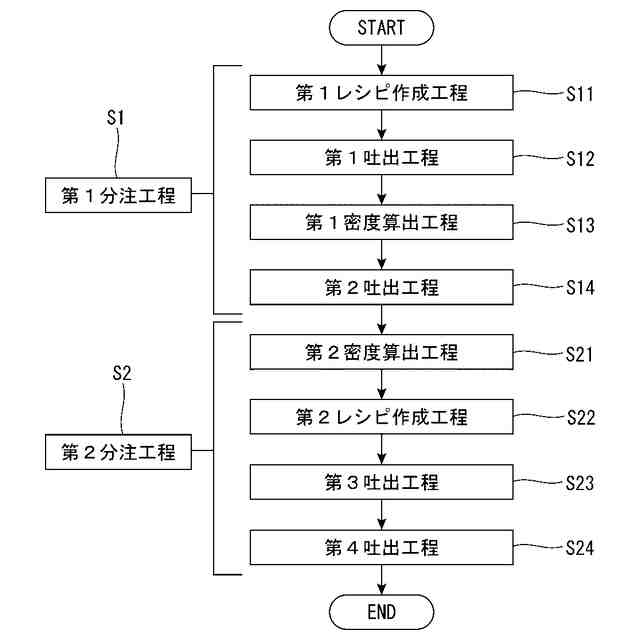
【解決手段】分注方法は、第1サンプルを作成する第1分注工程と、第1分注工程の後に行われ、第2サンプルを作成する第2分注工程と、を含む。また、第2分注工程は、第1分注工程において吐出された液体試料の総吐出量および総重量に基づいて液体試料の密度を算出する第2密度算出工程と、第2密度算出工程において算出した密度を用いて決定された第3吐出量指令値に基づいて液体吐出装置から液体試料を吐出させる第3吐出工程と、第2密度算出工程において算出した密度を用いて決定され、第3吐出工程において吐出された液体試料との合計重量が目標重量となる第4吐出量指令値に基づいて液体吐出装置から液体試料を吐出させる第4吐出工程と、を含む。
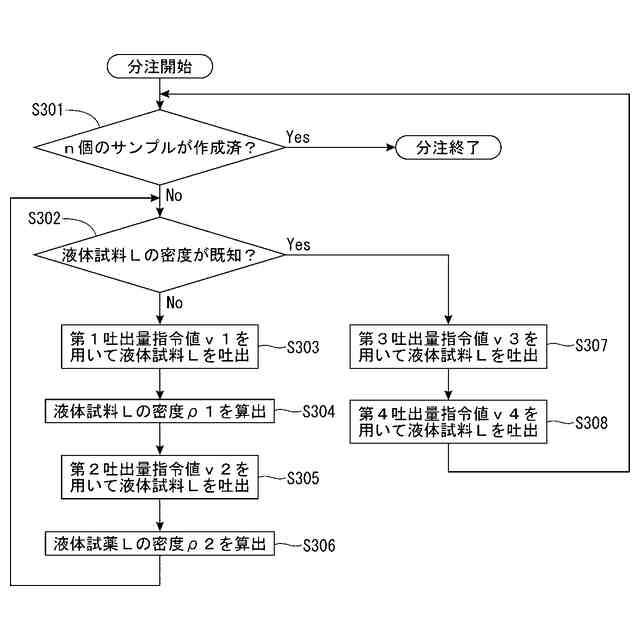
【選択図】図3
特許請求の範囲
【請求項1】
液体吐出装置から目標重量の液体試料を吐出させる分注方法であって、
第1サンプルを作成する第1分注工程と、
前記第1分注工程の後に行われ、第2サンプルを作成する第2分注工程と、を含み、
前記第1分注工程は、
前記目標重量よりも吐出重量が小さい第1吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第1吐出工程と、
前記第1吐出工程で吐出させた前記液体試料の重量を測定し、前記測定した重量および前記第1吐出量指令値に基づいて前記液体試料の密度を算出する第1密度算出工程と、
前記第1密度算出工程において算出した前記密度を用いて決定され、前記第1吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第2吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第2吐出工程と、を含み、
前記第2分注工程は、
前記第1分注工程において吐出された前記液体試料の総吐出量および総重量に基づいて前記液体試料の密度を算出する第2密度算出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第1吐出量指令値および前記第2吐出量指令値の間の値となる第3吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第3吐出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第3吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第4吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第4吐出工程と、を含むことを特徴とする分注方法。
続きを表示(約 1,000 文字)
【請求項2】
前記目標重量の40%以上60%以下となるように前記第3吐出量指令値を決定する請求項1に記載の分注方法。
【請求項3】
前記第1吐出量指令値、前記第2吐出量指令値、前記第3吐出量指令値および前記第4吐出量指令値を、それぞれ、前記液体吐出装置の最大吐出量の50%以下とする請求項1に記載の分注方法。
【請求項4】
前記液体試料は、グリセリンである請求項1に記載の分注方法。
【請求項5】
ロボットと、
前記ロボットの駆動を制御するロボット制御装置と、
前記ロボットに配置され、液体試料を吐出する液体吐出装置と、
前記液体吐出装置から吐出された前記液体試料の重量を測定する重量計と、
前記液体吐出装置の駆動を制御するペリフェラル制御装置と、を有し、
ペリフェラル制御装置は、
第1サンプルを作成する第1分注工程と、
前記第1分注工程の後に行われ、第2サンプルを作成する第2分注工程と、を実行し、
前記第1分注工程では、
前記目標重量よりも吐出重量が小さい第1吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第1吐出工程と、
前記第1吐出工程で吐出させた前記液体試料の重量を前記重量計を用いて測定し、前記測定した重量および前記第1吐出量指令値に基づいて前記液体試料の密度を算出する第1密度算出工程と、
前記第1密度算出工程において算出した前記密度を用いて決定され、前記第1吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第2吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第2吐出工程と、を行い、
前記第2分注工程では、
前記第1分注工程において吐出された前記液体試料の総吐出量および総重量に基づいて前記液体試料の密度を算出する第2密度算出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第1吐出量指令値および前記第2吐出量指令値の間の値となる第3吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第3吐出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第3吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第4吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第4吐出工程と、を行うことを特徴とする分注システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、分注方法および分注システムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1には、実際に計量を行うピペットで容量を設定するステップと、設定した容量の被計量液体をピペットで吸引するステップと、ピペットで吸引した被計量液体を重量計上に吐出してピペットで吸引した被計量液体の重量を測定するステップと、測定した重量から、ピペットから実際に吐出された被計量液体の容量を確定するステップと、設定した容量と実際の容量との比を求め、この比を設定した容量に乗算した量を吸引するよう校正するステップと、を含む分注方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2015/071956号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、吐出条件によって被計量液体の密度が変化するおそれがあり、分注の精度を上げることが難しい。
【課題を解決するための手段】
【0005】
本発明の分注方法は、液体吐出装置から目標重量の液体試料を吐出させる分注方法であって、
第1サンプルを作成する第1分注工程と、
前記第1分注工程の後に行われ、第2サンプルを作成する第2分注工程と、を含み、
前記第1分注工程は、
前記目標重量よりも吐出重量が小さい第1吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第1吐出工程と、
前記第1吐出工程で吐出させた前記液体試料の重量を測定し、前記測定した重量および前記第1吐出量指令値に基づいて前記液体試料の密度を算出する第1密度算出工程と、
前記第1密度算出工程において算出した前記密度を用いて決定され、前記第1吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第2吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第2吐出工程と、を含み、
前記第2分注工程は、
前記第1分注工程において吐出された前記液体試料の総吐出量および総重量に基づいて前記液体試料の密度を算出する第2密度算出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第1吐出量指令値および前記第2吐出量指令値の間の値となる第3吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第3吐出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第3吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第4吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第4吐出工程と、を含む。
【0006】
本発明の分注システムは、ロボットと、
前記ロボットの駆動を制御するロボット制御装置と、
前記ロボットに配置され、液体試料を吐出する液体吐出装置と、
前記液体吐出装置から吐出された前記液体試料の重量を測定する重量計と、
前記液体吐出装置の駆動を制御するペリフェラル制御装置と、を有し、
ペリフェラル制御装置は、
第1サンプルを作成する第1分注工程と、
前記第1分注工程の後に行われ、第2サンプルを作成する第2分注工程と、を実行し、
前記第1分注工程では、
前記目標重量よりも吐出重量が小さい第1吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第1吐出工程と、
前記第1吐出工程で吐出させた前記液体試料の重量を前記重量計を用いて測定し、前記測定した重量および前記第1吐出量指令値に基づいて前記液体試料の密度を算出する第1密度算出工程と、
前記第1密度算出工程において算出した前記密度を用いて決定され、前記第1吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第2吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第2吐出工程と、を行い、
前記第2分注工程では、
前記第1分注工程において吐出された前記液体試料の総吐出量および総重量に基づいて前記液体試料の密度を算出する第2密度算出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第1吐出量指令値および前記第2吐出量指令値の間の値となる第3吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第3吐出工程と、
前記第2密度算出工程において算出した前記密度を用いて決定され、前記第3吐出工程において吐出された前記液体試料との合計重量が前記目標重量となる第4吐出量指令値に基づいて前記液体吐出装置から前記液体試料を吐出させる第4吐出工程と、を行う。
【図面の簡単な説明】
【0007】
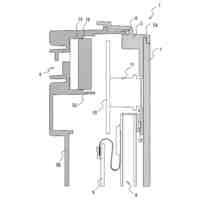
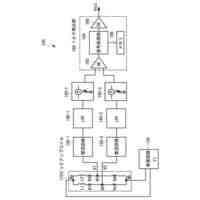
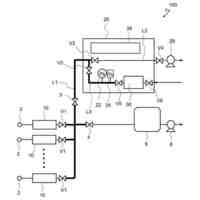
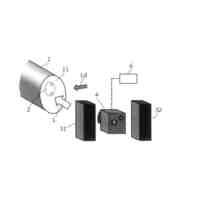
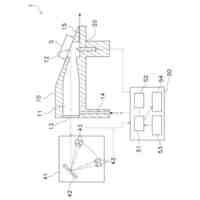
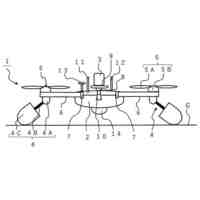
好適な実施形態に係る分注システムを示す全体図である。
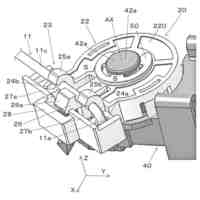
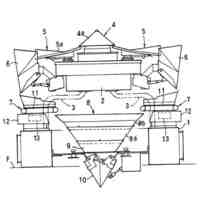
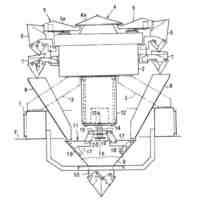
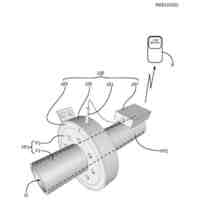
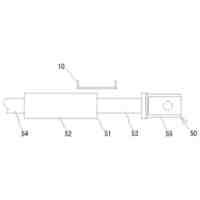
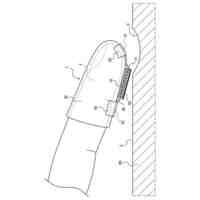
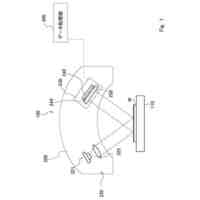
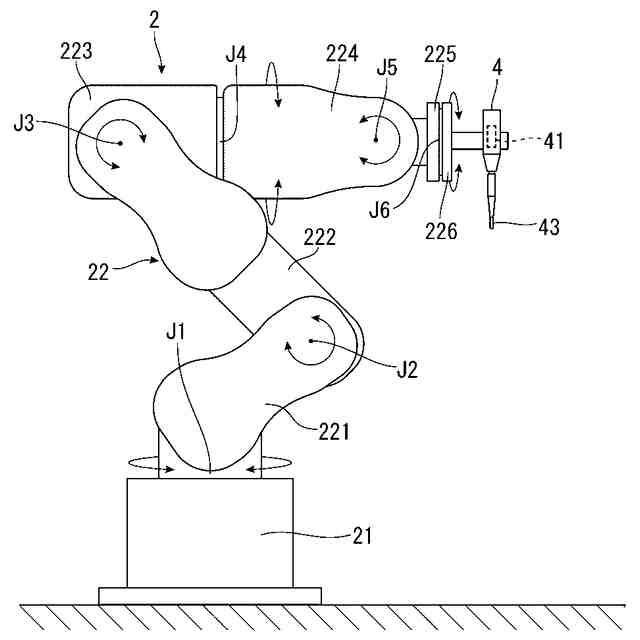
図1の分注システムが有するロボットの側面図である。
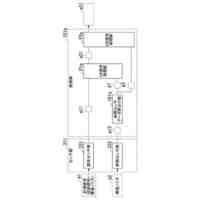
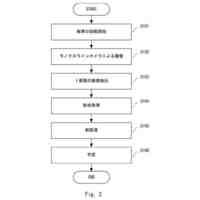
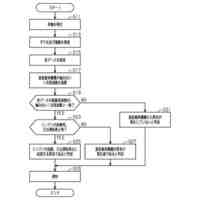
分注方法の工程を示すフローチャートである。
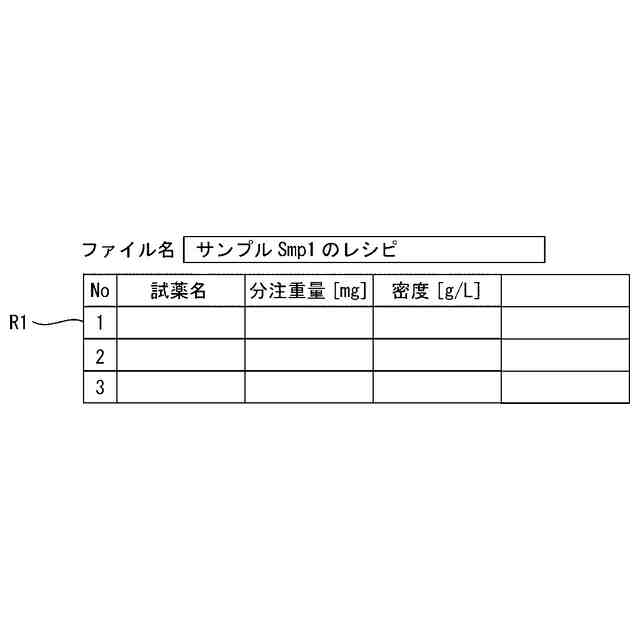
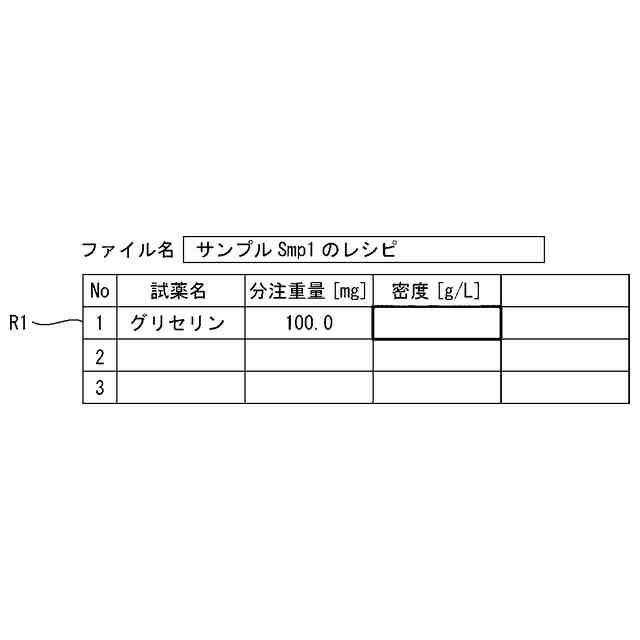
第1レシピ表を示す図である。
第1レシピ表を示す図である。
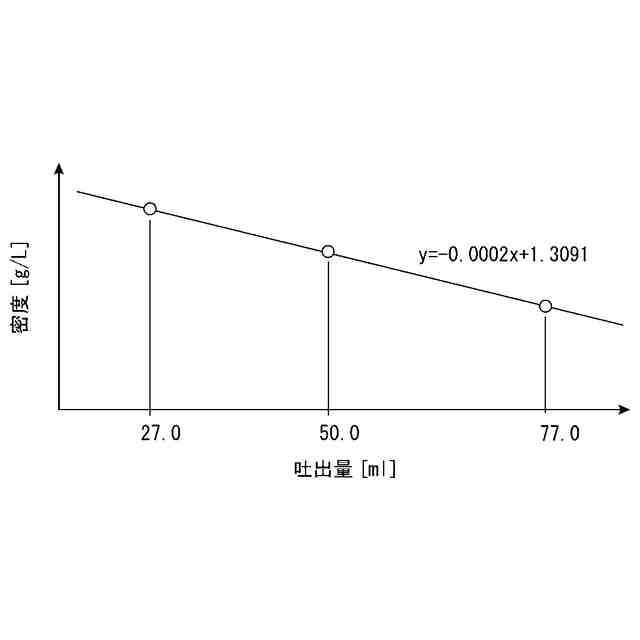
吐出量と密度との関係を示すグラフである。
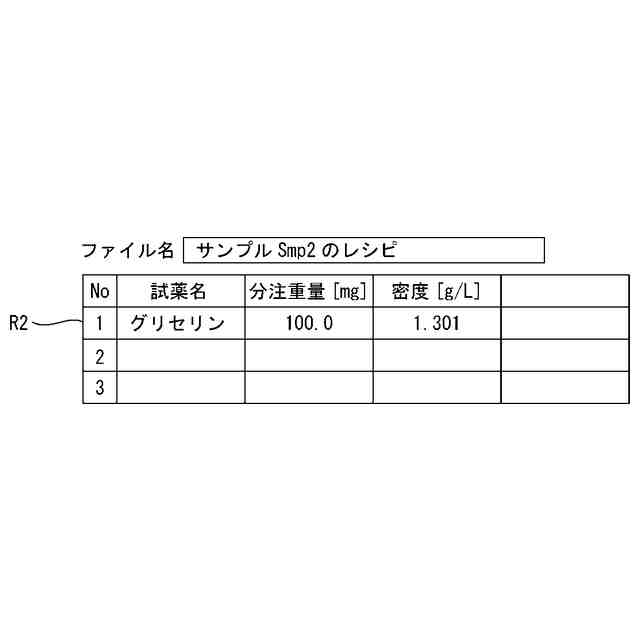
第2レシピ表を示す図である。
第2レシピ表を示す図である。
分注方法の工程を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の分注方法および分注システムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
図1は、好適な実施形態に係る分注システムを示す全体図である。図2は、図1の分注システムが有するロボットの側面図である。図3は、分注方法の工程を示すフローチャートである。図4および図5は、それぞれ、第1レシピ表を示す図である。図6は、吐出量と密度との関係を示すグラフである。図7および図8は、それぞれ、第2レシピ表を示す図である。図9は、分注方法の工程を示すフローチャートである。
【0010】
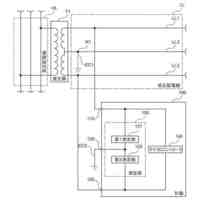
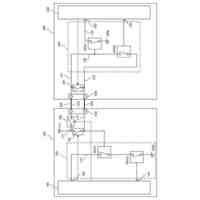
図1に示す分注システム1は、所謂「ピペッティングロボットシステム」であり、ロボット2を用いて液体試料Lの自動分注を行う。このような分注システム1は、ロボット2と、ロボット2の駆動を制御するロボット制御装置3と、ロボット2に取り付けられた液体吐出装置としてのピペット4と、重量計としての電子天秤5と、ピペット4および電子天秤5の駆動を制御するペリフェラル制御装置6と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
5日前
株式会社東光高岳
計器
1日前
日本精機株式会社
液面検出装置
7日前
大和製衡株式会社
組合せ秤
13日前
有限会社原製作所
検出回路
27日前
大和製衡株式会社
組合せ秤
7日前
大和製衡株式会社
組合せ秤
7日前
個人
フロートレス液面センサー
20日前
日本特殊陶業株式会社
ガスセンサ
8日前
日本特殊陶業株式会社
ガスセンサ
19日前
日本特殊陶業株式会社
ガスセンサ
8日前
ダイハツ工業株式会社
試験用治具
13日前
キヤノン株式会社
放射線撮像装置
22日前
株式会社クボタ
作業車
12日前
大同特殊鋼株式会社
座標系較正方法
22日前
富士電機株式会社
エンコーダ
今日
富士電機株式会社
エンコーダ
今日
株式会社フジキン
流量測定装置
14日前
旭光電機株式会社
漏出検出装置
19日前
TDK株式会社
計測装置
6日前
大同特殊鋼株式会社
ラベル色特定方法
22日前
新電元メカトロニクス株式会社
位置検出装置
5日前
株式会社ノーリツ
通信システム
5日前
トヨタ自動車株式会社
歯車の検査方法
8日前
株式会社アステックス
ラック型負荷装置
20日前
日本電気株式会社
測位装置及びその方法
1日前
住友化学株式会社
積層基板
19日前
株式会社島津製作所
発光分析装置
5日前
DIC株式会社
凹凸増幅用具
5日前
株式会社イシダ
X線検査装置
26日前
東芝ライテック株式会社
センサ装置
1日前
SMC株式会社
位置検出センサ
12日前
株式会社セシアテクノ
気象観測装置
1日前
株式会社ミツトヨ
非接触表面性状評価装置
21日前
パイオニア株式会社
評価装置
12日前
トヨタ自動車株式会社
異音判定装置
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ