TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109570
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024003544
出願日
2024-01-12
発明の名称
電動車のための制御システム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人 快友国際特許事務所
主分類
B60L
3/04 20060101AFI20250717BHJP(車両一般)
要約
【課題】退避走行モードへスムーズに移行し得る技術を提供すること。
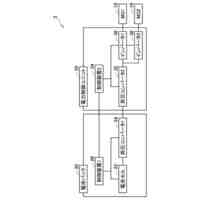
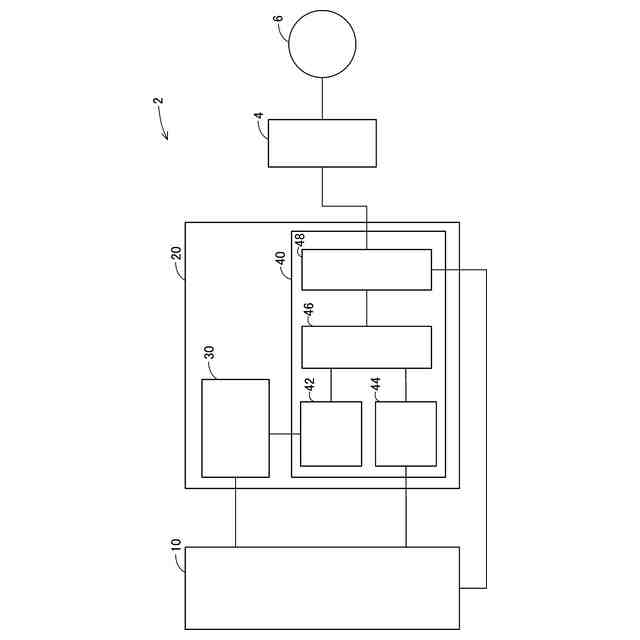
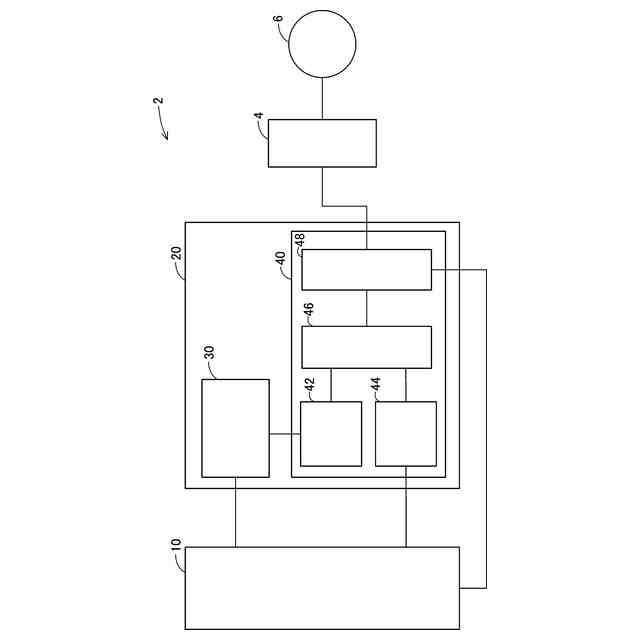
【解決手段】本明細書の制御システムは、電力制御装置と、第1の指令値を出力する第1の制御装置と、第1の指令値に基づいて、電力制御装置に駆動信号を出力する第2の制御装置と、を備え、第2の制御装置は、プロセッサと、ロジック回路と、を備え、第1の制御装置は、退避走行モードが実行される場合に、第2の指令値をロジック回路に出力し、ロジック回路は、第1の回路構造と、第2の回路構造と、第1の回路構造によって変換された駆動信号と、第2の回路構造によって変換された退避走行用の駆動信号と、が入力され、それらの一方を択一的に出力する第3の回路構造と、第3の回路構造による出力と、電力制御装置に対する遮断指令とが入力され、遮断指令が入力されている間は前記第3の回路構造による出力を遮断する第4の回路構造と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
電動車のための制御システムであって、
前記電動車のモータへの供給電力を調節する電力制御装置と、
前記モータの目標とする出力を示す第1の指令値を出力する第1の制御装置と、
前記第1の制御装置と通信可能に構成され、前記第1の制御装置から出力された前記第1の指令値に基づいて、前記電力制御装置に駆動信号を出力する第2の制御装置と、
を備え、
前記第2の制御装置は、
前記第1の制御装置と通信可能に構成され、前記第1の制御装置から出力された前記第1の指令値をプログラムで処理して、前記モータに対する動作指令値を出力するプロセッサと、
前記プロセッサから出力された前記動作指令値を前記駆動信号へ変換する第1の回路構造を有するロジック回路と、
を備え、
前記第1の制御装置は、前記電動車を退避走行させるための退避走行モードが実行される場合に、前記第1の指令値に代えて、前記退避走行モードに基づく第2の指令値を前記ロジック回路に出力し、
前記ロジック回路は、さらに、
前記第1の制御装置から出力された前記第2の指令値を退避走行用の駆動信号に変換する第2の回路構造と、
前記第1の回路構造によって変換された前記駆動信号と、前記第2の回路構造によって変換された前記退避走行用の駆動信号と、が入力され、それらの一方を択一的に出力する第3の回路構造と、
前記第3の回路構造による出力と、前記電力制御装置に対する遮断指令とが入力され、前記遮断指令が入力されている間は前記第3の回路構造による前記出力を遮断する第4の回路構造と、
を有する、制御システム。
続きを表示(約 500 文字)
【請求項2】
前記遮断指令は、前記第1の制御装置から前記ロジック回路に出力される、請求項1に記載の制御システム。
【請求項3】
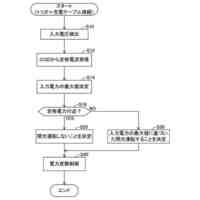
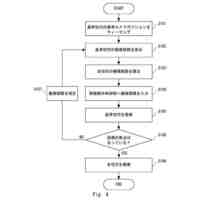
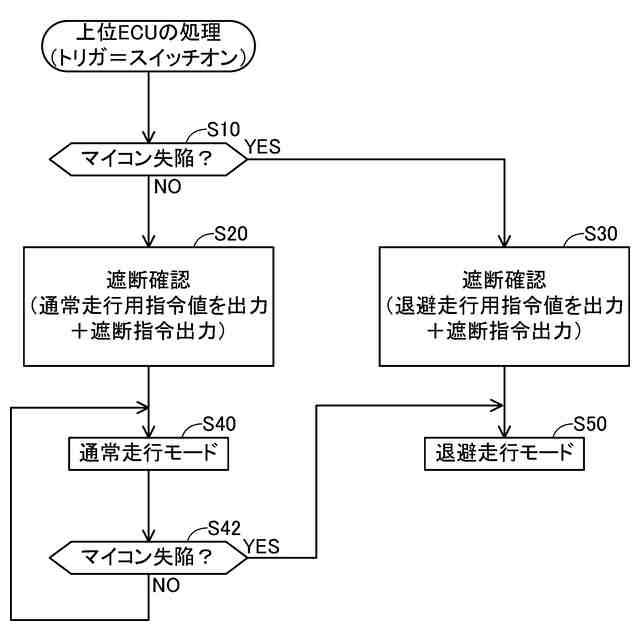
前記第1の制御装置は、前記電動車の電源がオンされる場合に、前記第1の指令値又は前記第2の指令値を前記第2の制御装置に出力し、かつ、前記遮断指令を前記ロジック回路に出力して、前記第3の回路構造による前記出力が遮断されることを確認することによって、前記第4の回路構造の健全性を確認する処理を実行する、請求項1に記載の制御システム。
【請求項4】
前記第1の制御装置は、前記プロセッサの失陥を検出する場合に、前記退避走行モードを実行する、請求項1に記載の制御システム。
【請求項5】
前記第1の制御装置は、前記電動車の電源がオンされ、かつ、前記プロセッサの失陥が検出される場合に、前記第2の指令値を前記ロジック回路に出力し、かつ、前記遮断指令を前記ロジック回路に出力して、前記第3の回路構造による前記出力が遮断されることを確認することによって、前記第4の回路構造の健全性を確認する処理を実行する、請求項1に記載の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書が開示する技術は、電動車のための制御システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、電動車が開示されている。この電動車は、ハイブリッド車であって、2個のモータを制御するための制御システムを有する。なお、本明細書における電動車とは、車輪を駆動する走行用モータを有する車両を広く意味する。例えば、電動車には、ハイブリッド車に加えて、バッテリ電動車、燃料電池車、プラグインハイブリッド車等が含まれる。
【先行技術文献】
【特許文献】
【0003】
特開2020-062930号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
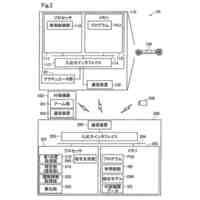
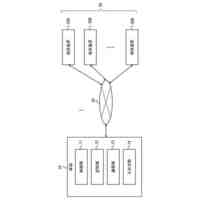
この種の制御システムは、複数の制御装置によって構成されることも多い。例えば、制御システムは、モータの目標とする出力(即ちトルク指令値)を決定する第1の制御装置と、第1の制御装置からのトルク指令値に応じてインバータといった電力制御装置へ動作指令値を出力する第2の制御装置と、を備えてもよい。この場合、第1の制御装置と第2の制御装置とは互いに通信可能に構成され、互いに協調しながらモータを制御する。
【0005】
上記の制御システムでは、第2の制御装置に失陥が生じた場合、第1の制御装置が健全であっても、モータを制御することができなくなる。しかしながら、第2の制御装置に生じた失陥が、第2の制御装置の一部に生じたものであって、第2の制御装置の他の構成は依然として利用可能であることも多い。このような場合、利用可能である第2の制御装置の他の構成を利用してモータを制御して、電動車を退避走行させることが想定される。
【0006】
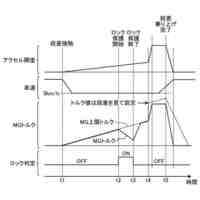
また、上記の制御システムにおいて、電動車を安全に走行させるために、例えば電動車を走行させるべきでない状況(例えばセンサ値の異常等)において、電力制御装置への動作指令を遮断するための遮断指令が出力される構成が想定される。上記の制御システムでは、例えば、第1の制御装置から第2の制御装置に遮断指令が出力される。遮断指令が出力されている間は、ユーザの指示等に基づいてトルク指令値が出力されても、第2の制御装置からの動作指令値は遮断されることで、電力制御装置の動作は停止される。電動車を安全に走行させるためには、第2の制御装置に遮断指令が入力されている間に、動作指令値が適切に遮断されていることが重要である。
【0007】
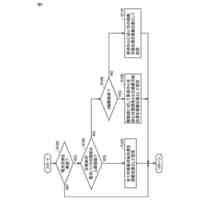
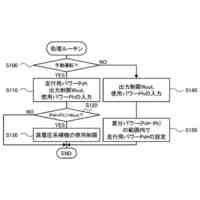
このため、遮断指令が出力されている間に、第2の制御装置からの動作指令値が遮断されるか否かの遮断確認を行う構成が想定される。特に、遮断確認は、通常走行モードと退避走行モードでそれぞれ独立に行われる構成が想定される。このような状況で、通常走行モードから退避走行モードへ移行されると、そのタイミングで遮断確認が行われ得る。この場合、通常走行モードから退避走行モードへの移行に比較的長い時間を要するおそれがある。本明細書では、退避走行モードへスムーズに移行し得る技術を提供する。
【課題を解決するための手段】
【0008】
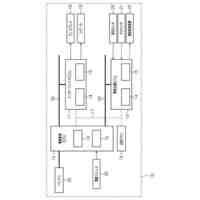
本明細書は、電動車のための制御システムを開示する。第1の態様では、制御システムは、前記電動車のモータへの供給電力を調節する電力制御装置と、前記モータの目標とする出力を示す第1の指令値を出力する第1の制御装置と、前記第1の制御装置と通信可能に構成され、前記第1の制御装置から出力された前記第1の指令値に基づいて、前記電力制御装置に駆動信号を出力する第2の制御装置と、を備え、前記第2の制御装置は、前記第1の制御装置と通信可能に構成され、前記第1の制御装置から出力された前記第1の指令値をプログラムで処理して、前記モータに対する動作指令値を出力するプロセッサと、前記プロセッサから出力された前記動作指令値を前記駆動信号へ変換する第1の回路構造を有するロジック回路と、を備え、前記第1の制御装置は、前記電動車を退避走行させるための退避走行モードが実行される場合に、前記第1の指令値に代えて、前記退避走行モードに基づく第2の指令値を前記ロジック回路に出力し、前記ロジック回路は、さらに、前記第1の制御装置から出力された前記第2の指令値を退避走行用の駆動信号に変換する第2の回路構造と、前記第1の回路構造によって変換された前記駆動信号と、前記第2の回路構造によって変換された前記退避走行用の駆動信号と、が入力され、それらの一方を択一的に出力する第3の回路構造と、前記第3の回路構造による出力と、前記電力制御装置に対する遮断指令とが入力され、前記遮断指令が入力されている間は前記第3の回路構造による前記出力を遮断する第4の回路構造と、を有する。
【0009】
上記の構成によると、ロジック回路は、第1の回路構造によって変換された駆動信号と、第2の回路構造によって変換された退避走行用の駆動信号と、が入力され、それらの一方を択一的に出力する第3の回路構造と、第3の回路構造による出力と、電力制御装置に対する遮断指令とが入力され、遮断指令が入力されている間は前記第3の回路構造による前記出力を遮断する第4の回路構造と、を有する。即ち、第4の回路構造は、第1の回路構造によって変換された駆動信号と、第2の回路構造によって変換された駆動信号と、に対して共通に設けられている。従って、退避走行モードが実行される場合に、第4の回路構造の健全性を確認することなく退避走行モードに移行することができる。即ち、退避走行モードへスムーズに移行できる。
【0010】
第2の態様では、上記第1の態様において、前記遮断指令は、前記第1の制御装置から前記ロジック回路に出力されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
装置
1か月前
トヨタ自動車株式会社
方法
20日前
トヨタ自動車株式会社
電極
1か月前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
電極
27日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
方法
27日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
24日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
方法
17日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
膜体
5日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
モータ
26日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
モータ
17日前
トヨタ自動車株式会社
電極体
25日前
トヨタ自動車株式会社
電動車
26日前
トヨタ自動車株式会社
移動体
19日前
トヨタ自動車株式会社
充電器
20日前
トヨタ自動車株式会社
充電器
17日前
トヨタ自動車株式会社
電動車両
24日前
トヨタ自動車株式会社
監視装置
24日前
トヨタ自動車株式会社
通知装置
24日前
トヨタ自動車株式会社
撮像方法
24日前
トヨタ自動車株式会社
電動車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ