TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110468
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004317
出願日
2024-01-16
発明の名称
制御装置、無人飛行体、飛行制御方法、および飛行制御プログラム
出願人
オムロン株式会社
代理人
弁理士法人 楓国際特許事務所
主分類
G08G
5/00 20250101AFI20250722BHJP(信号)
要約
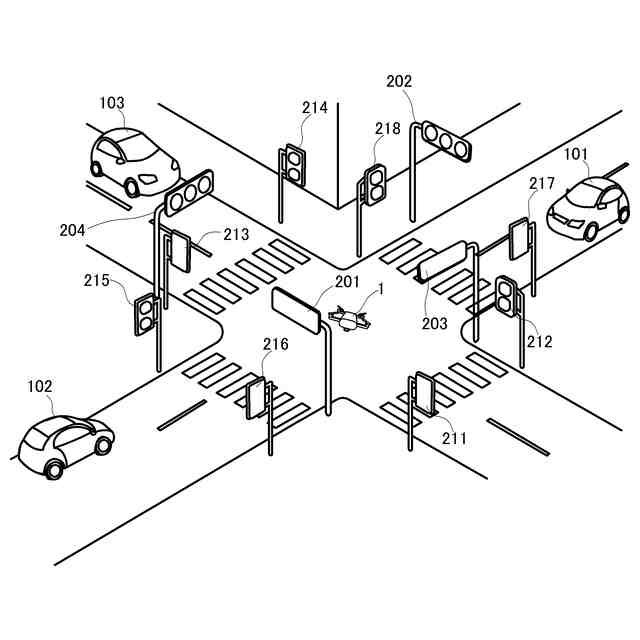
【課題】ドローン等の無人飛行体を利用して、交差点に設置されている信号灯器を点検する場合の安全性を向上する。
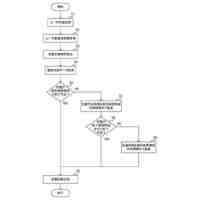
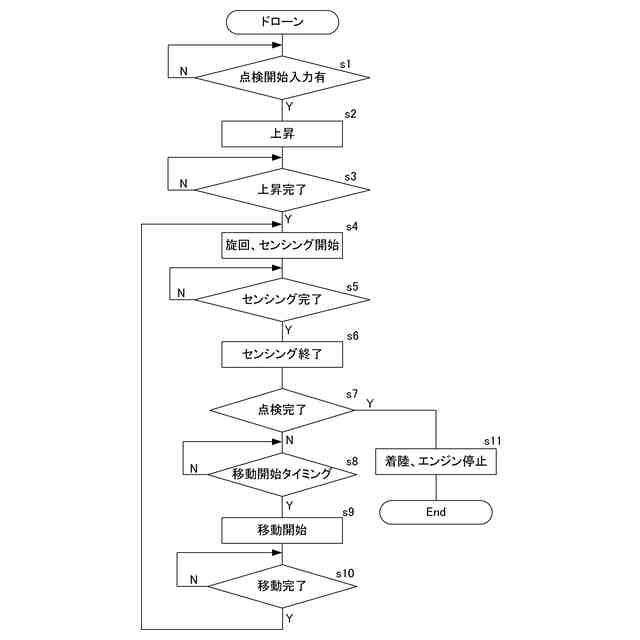
【解決手段】制御装置は、交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する。判断部は、無人飛行体を現在位置から、次に状態をセンシングする信号灯器への移動開始タイミングを判断する。判断部は、交差点に設置されている全ての信号灯器の灯色信号が赤信号であることを条件に移動開始タイミングを判断する、移動制御部は、判断部が判断した移動開始タイミングで、無人飛行体を現在位置から、次に状態をセンシングする信号灯器への移動を開始させる。
【選択図】図2
特許請求の範囲
【請求項1】
交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する制御装置であって、
前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動開始タイミングを判断する判断部と、
前記判断部が判断した前記移動開始タイミングで、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動を開始させる移動制御部と、を備え、
前記判断部は、前記交差点に設置されている全ての前記信号灯器の灯色信号が赤信号であることを条件に前記移動開始タイミングを判断する、
制御装置。
続きを表示(約 1,900 文字)
【請求項2】
交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する制御装置であって、
前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動開始タイミングを判断する判断部と、
前記判断部が判断した前記移動開始タイミングで、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動を開始させる移動制御部と、を備え、
前記判断部は、前記交差点に設置されている全ての前記信号灯器において、灯色信号が赤信号になる全赤状態の開始タイミングを前記移動開始タイミングであると判断する、
制御装置。
【請求項3】
前記交差点に設置されている前記信号灯器の灯色信号が切り換えられるタイミングを示す信号情報を受信する受信部を備え、
前記判断部は、前記受信部で受信した信号情報を基に前記移動開始タイミングを判断する、請求項2に記載の制御装置。
【請求項4】
前記移動制御部は、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器に移動させる方向が、次に前記交差点への進入が許可される車両の走行方向と同じ方向である、請求項1~3のいずれかに記載の制御装置。
【請求項5】
交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する制御装置であって、
前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動開始タイミングを判断する判断部と、
前記判断部が判断した前記移動開始タイミングで、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動を開始させる移動制御部と、を備え、
前記判断部は、前記交差点内を車両が走行していないことを条件に前記移動開始タイミングを判断する、
制御装置。
【請求項6】
前記判断部は、前記交差点内が撮像された画像を処理し、前記移動開始タイミングを判断する、請求項5に記載の制御装置。
【請求項7】
請求項1、2、または5のいずれかに記載の制御装置が搭載された無人飛行体。
【請求項8】
交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する制御装置のコンピュータが、
前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動開始タイミングを判断する判断ステップと、
前記判断ステップで判断された前記移動開始タイミングで、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動を開始させる移動制御ステップと、を実行し、
前記判断ステップは、前記交差点に設置されている全ての前記信号灯器の灯色信号が赤信号であることを条件に前記移動開始タイミングを判断するステップである、
飛行制御方法。
【請求項9】
交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する制御装置のコンピュータが、
前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動開始タイミングを判断する判断ステップと、
前記判断ステップで判断された前記移動開始タイミングで、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動を開始させる移動制御ステップと、を実行し、
前記判断ステップは、前記交差点に設置されている全ての前記信号灯器において、灯色信号が赤信号になる全赤状態の開始タイミングを前記移動開始タイミングであると判断するステップである、
飛行制御方法。
【請求項10】
交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体の飛行を制御する制御装置のコンピュータが、
前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動開始タイミングを判断する判断ステップと、
前記判断ステップで判断された前記移動開始タイミングで、前記無人飛行体を現在位置から、次に状態をセンシングする前記信号灯器への移動を開始させる移動制御ステップと、を実行し、
前記判断ステップは、前記交差点内を車両が走行していないことを条件に前記移動開始タイミングを判断するステップである、
飛行制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、交差点に設置されている信号灯器の点検に、ドローン等の無人飛行体を利用する技術に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
従来、様々な分野で、ドローン等の無人飛行体の利用が検討されている。
【0003】
例えば、特許文献1には、無人飛行体(空中移動機器)を利用して、橋梁の損害状態の調査・検査を行うシステムが記載されている。
【0004】
また、例えば、特許文献2には、ドローンを荷物の配送に活用するシステムが記載されている。この特許文献2では、ドローン、またはドローンが保持していた荷物の落下を歩行者等に通知する構成が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2015- 34428号公報
特開2021-196879号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、ドローンを利用して交差点に設置されている信号灯器を点検する場合、ドローンが走行している車両と接触して落下するのを抑制し、安全性を向上させる必要がある。すなわち、ドローンを利用して交差点に設置されている信号灯器の点検を行うために、ドローンが走行している車両と接触するのを抑制する技術が要望されている。
【0007】
この発明の目的は、ドローン等の無人飛行体を利用して、交差点に設置されている信号灯器を点検する場合の安全性が向上できる技術を提供することにある
【課題を解決するための手段】
【0008】
この発明の制御装置は、上記目的を達成するため以下に示すように構成している。
【0009】
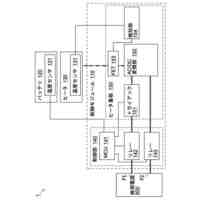
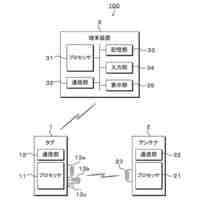
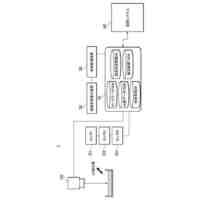
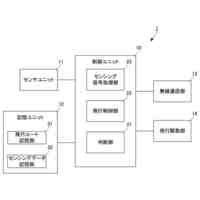
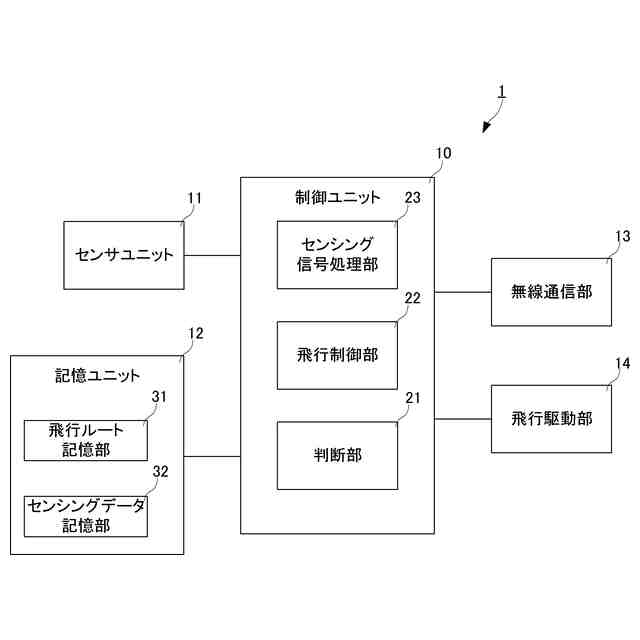
制御装置は、交差点に設置されている信号灯器の状態をセンシングするセンサが搭載された無人飛行体(例えば、ドローン)の飛行を制御する。無人飛行体に搭載されたセンサのセンシング信号により、交差点に設置されている信号灯器の状態の診断、点検を行う。制御装置は、無人飛行体に搭載されていてもよいし、無人飛行体を遠隔操作するコントローラであってもよい。制御装置がコントローラである場合、制御装置は、無人飛行体に対して飛行制御信号を無線通信で送信する。
【0010】
判断部は、無人飛行体を現在位置から、次に状態をセンシングする信号灯器への移動開始タイミングを判断する。判断部は、例えば、交差点に設置されている全ての信号灯器の灯色信号が赤信号であることを条件に移動開始タイミングを判断する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
安全装置
1か月前
オムロン株式会社
操作装置
1か月前
オムロン株式会社
ドライバ
26日前
オムロン株式会社
電磁継電器
28日前
オムロン株式会社
スイッチ装置
25日前
オムロン株式会社
電磁ロック装置
1か月前
オムロン株式会社
シート検査装置
26日前
オムロン株式会社
無停電電源装置
5日前
オムロン株式会社
インバータ装置
1か月前
オムロン株式会社
電気機器ユニット
7日前
オムロン株式会社
スイッチング装置
10日前
オムロン株式会社
電気機器ユニット
1か月前
オムロン株式会社
情報処理システム
12日前
オムロン株式会社
処理方法、及び処理装置
26日前
オムロン株式会社
車椅子用治具および車椅子
1か月前
オムロン株式会社
端子台および端子台セット
1か月前
オムロン株式会社
車椅子用治具および車椅子
1か月前
オムロン株式会社
充電システム及びモジュール
25日前
オムロン株式会社
送電装置、受電装置およびシステム
1か月前
オムロン株式会社
トルク推定方法及びトルク推定装置
4日前
オムロン株式会社
通信装置、通信方法、通信プログラム
10日前
オムロン株式会社
制御装置、制御方法及び制御プログラム
1か月前
オムロン株式会社
風計測装置およびこれを備えた気象センサ
1か月前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
26日前
オムロン株式会社
充電器、電力開閉モジュール、充電システム
7日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
25日前
オムロン株式会社
培地監視装置、培地監視方法、及びプログラム
1か月前
オムロン株式会社
外装ケースユニット、外装ケース及び電気設備
7日前
オムロン株式会社
導光板、表示装置、遊技機、および車載表示器
1か月前
オムロン株式会社
アンテナ設定方法及びそれを用いた測位システム
12日前
オムロン株式会社
風計測装置、風計測方法および風計測プログラム
1か月前
オムロン株式会社
スイッチ
1か月前
オムロン株式会社
充電計画生成装置、電力開閉モジュール及び充電システム
7日前
オムロン株式会社
制御装置、無人飛行体、飛行制御方法、および飛行制御プログラム
6日前
オムロン株式会社
ペン型入力装置、描画態様変更方法、および、描画態様変更プログラム
7日前
オムロン株式会社
検査管理システム、検査管理装置、教師データ生成方法、及びプログラム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ