TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112154
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006281
出願日
2024-01-18
発明の名称
トルク推定方法及びトルク推定装置
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G01L
5/166 20200101AFI20250724BHJP(測定;試験)
要約
【課題】画像型接触センサを用いたトルク推定の精度を高める。
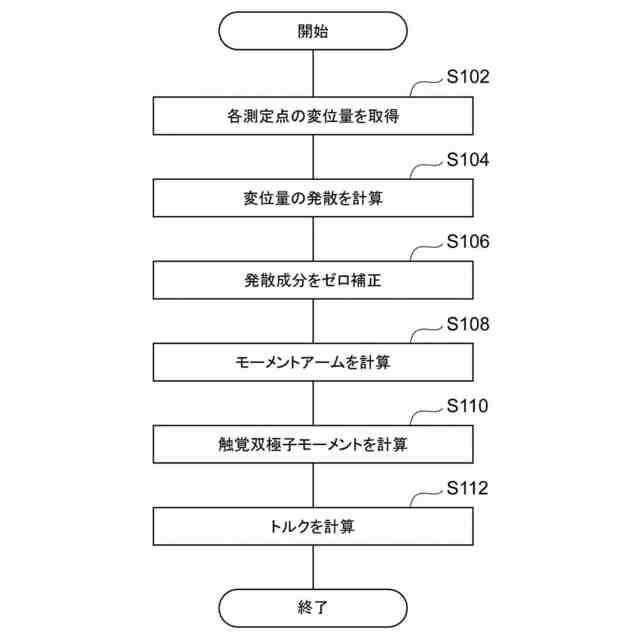
【解決手段】トルク推定方法は、対象物と対向する対向面において外力によって変位する複数の測定点の変位ベクトルの発散と、基準点から測定点までのモーメントアームと、を乗じた測定点でのモーメントの全ての前記測定点での総和を取り、前記対向面に対し傾斜している方向のトルクを推定する。
【選択図】図4
特許請求の範囲
【請求項1】
対象物と対向する対向面において外力によって変位する複数の測定点の変位ベクトルの発散と、基準点から前記測定点までのモーメントアームと、を乗じた前記測定点でのモーメントの全ての前記測定点での総和を取り、前記対向面の法線に対し傾斜している方向のトルクを推定する、トルク推定方法。
続きを表示(約 620 文字)
【請求項2】
前記対向面における前記変位ベクトルの総和がゼロになるように各測定点の前記変位ベクトルの値に一定の補正値を加算又は減算する請求項1に記載のトルク推定方法。
【請求項3】
前記対向面において前記変位ベクトルの発散の重心を前記基準点とする請求項1に記載のトルク推定方法。
【請求項4】
前記変位ベクトルの発散の重心の位置を、前記変位ベクトルの発散の正の部分、及び負の部分からそれぞれ得られる重心の位置から求める、請求項3に記載のトルク推定方法。
【請求項5】
前記基準点を、所定のトリガより再設定する、請求項1に記載のトルク推定方法。
【請求項6】
前記変位ベクトルを、触覚センサに設定されている複数の前記測定点のマーカの移動に基づき取得する、請求項1に記載のトルク推定方法。
【請求項7】
対象物と対向する対向面に複数の測定点を備えている触覚センサと、
複数の前記測定点での変位ベクトルの発散と、基準点から前記測定点までのモーメントアームと、を乗じた前記測定点でのモーメントの全ての前記測定点での総和を取り、前記対向面の法線に対し傾斜している方向のトルクを推定する演算装置と、
を有するトルク推定装置。
【請求項8】
前記触覚センサは、前記測定点の変位ベクトルを画像として取得する、請求項7に記載のトルク推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、トルク推定方法及びトルク推定装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
非特許文献1には、対象物に対向する対向面に複数の測定点を有する画像型接触センサを用い、測定点での変位ベクトルの発散をとることにより、対向面の法線方向の力を推定する技術が記載されている。
【先行技術文献】
【非特許文献】
【0003】
Zhang, Yazhan, et al. "Effective estimation of contact force and torque for vision-based tactile sensors with helmholtz-hodge decomposition." IEEE Robotics and Automation Letters 4.4(2019): 4094-4101.
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に記載の方法では、画像型接触センサの対向面の法線方向の力は推定できるが、より高精度なトルク推定については、改善の余地がある。
【0005】
本開示は、画像型接触センサを用いたトルク推定の精度を高めることを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様は、対象物と対向する対向面において外力によって変位する複数の測定点の変位ベクトルの発散と、基準点から前記測定点までのモーメントアームと、を乗じた前記測定点でのモーメントの全ての前記測定点での総和を取り、前記対向面の法線に対し傾斜している方向のトルクを推定する、トルク推定方法である。
【発明の効果】
【0007】
本開示によれば、画像型接触センサを用いたトルク推定の精度を高めることができる。
【図面の簡単な説明】
【0008】
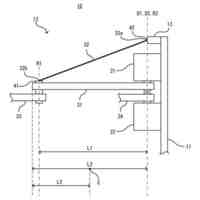
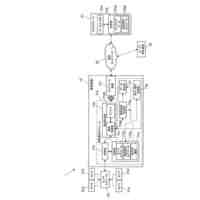
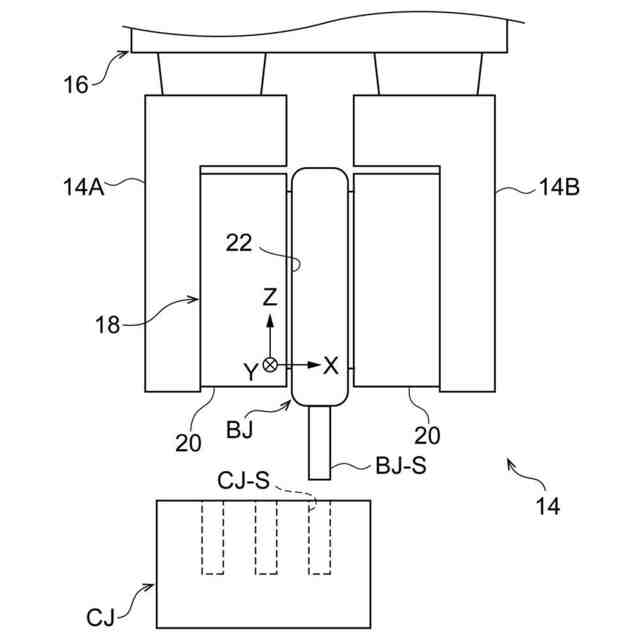
図1は第一実施形態のトルク推定方法が適用されるトルク推定装置を備えたエンドエフェクタの正面図である。
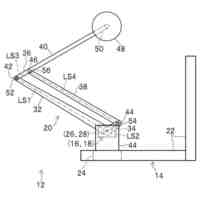
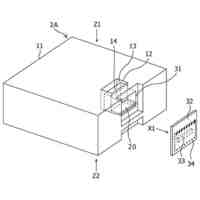
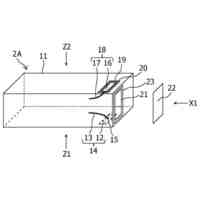
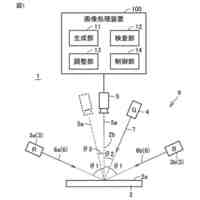
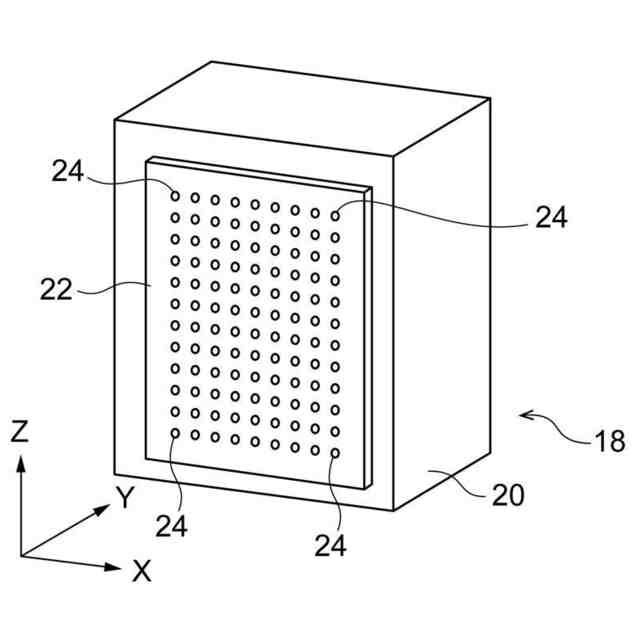
図2は第一実施形態のトルク推定方法に用いる画像型触覚センサの例を示す斜視図である。
図3は第一実施形態のトルク推定方法を実行するコンピュータを示す構成図である。
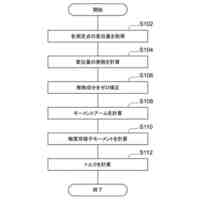
図4は第一実施形態のトルク推定方法における演算処理を示すフローチャートである。
図5Aは対象物を把持していない状態での画像型接触センサの対向面の力を示す分布図である。
図5Bは対象物を把持している状態での画像型接触センサの対向面の力を示す分布図である。
図5Cは対象物を把持している状態での画像型接触センサの対向面のトルクをゼロ調整前の状態で示す分布図である。
図5Dは対象物を把持している状態での画像型接触センサの対向面のトルクをゼロ調整後の状態で示す分布図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態の一例であるトルク推定方法及びトルク推定装置12を、このトルク推定方法が適用されるエンドエフェクタ14と共に、図面を参照しつつ説明する。なお、各図面において同一又は実質的に同等な要素、部材及び部分には同一の参照符号を付与している。また、図面の寸法及び比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
【0010】
図1に示すように、エンドエフェクタ14は、一対の把持部14A、14Bを有している。把持部14A、14Bは、たとえばアクチュエータ16によって接近及び離隔するようになっている。把持部14A、14Bが互いに接近することで、対象物BJを把持できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
ドライバ
2か月前
オムロン株式会社
ロボット
3か月前
オムロン株式会社
ロボット
3か月前
オムロン株式会社
操作装置
3か月前
オムロン株式会社
電源回路
3日前
オムロン株式会社
電源回路
3日前
オムロン株式会社
電源回路
3日前
オムロン株式会社
制御装置
1か月前
オムロン株式会社
安全装置
3か月前
オムロン株式会社
電磁継電器
27日前
オムロン株式会社
電磁継電器
2か月前
オムロン株式会社
電力変換装置
3か月前
オムロン株式会社
スイッチ装置
2か月前
オムロン株式会社
シート検査装置
2か月前
オムロン株式会社
無停電電源装置
2か月前
オムロン株式会社
インバータ装置
2か月前
オムロン株式会社
電磁ロック装置
3か月前
オムロン株式会社
情報処理システム
2か月前
オムロン株式会社
スイッチング装置
2か月前
オムロン株式会社
電気機器ユニット
2か月前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
電気機器ユニット
2か月前
オムロン株式会社
処理方法、及び処理装置
2か月前
オムロン株式会社
ソリッドステートリレー
3か月前
オムロン株式会社
端子台および端子台セット
2か月前
オムロン株式会社
車椅子用治具および車椅子
3か月前
オムロン株式会社
車椅子用治具および車椅子
3か月前
オムロン株式会社
充電システム及びモジュール
2か月前
オムロン株式会社
情報処理装置及び情報処理方法
9日前
オムロン株式会社
搬送装置、搬送方法、プログラム
1か月前
オムロン株式会社
送電装置、受電装置およびシステム
3か月前
オムロン株式会社
電力変換装置及び電力変換システム
3か月前
オムロン株式会社
回転制御システム及び回転制御方法
1か月前
オムロン株式会社
トルク推定方法及びトルク推定装置
1か月前
オムロン株式会社
画像処理システムおよび画像処理方法
1か月前
オムロン株式会社
通信装置、通信方法、通信プログラム
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ