TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110746
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004765
出願日
2024-01-16
発明の名称
光空間通信装置、光空間通信方法、およびプログラム
出願人
日本電気株式会社
代理人
個人
主分類
H04B
10/112 20130101AFI20250722BHJP(電気通信技術)
要約
【課題】光空間通信において擾乱による影響を低減させることできる技術を実現する。
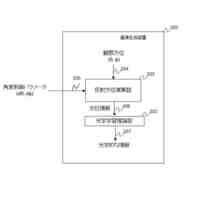
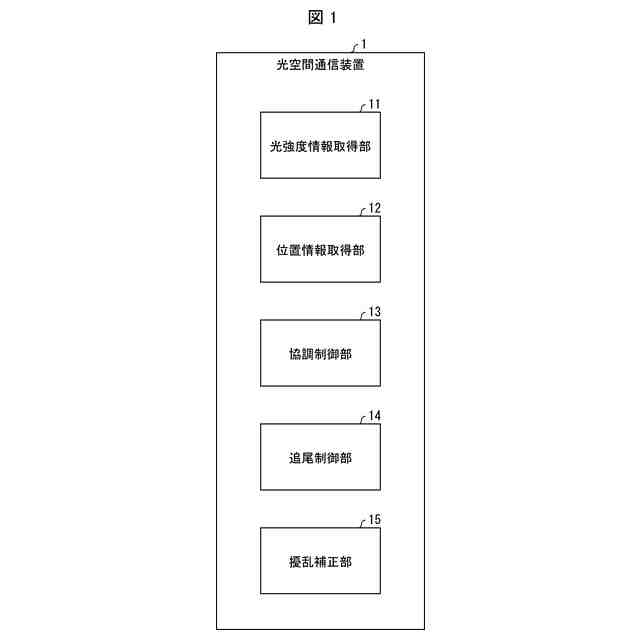
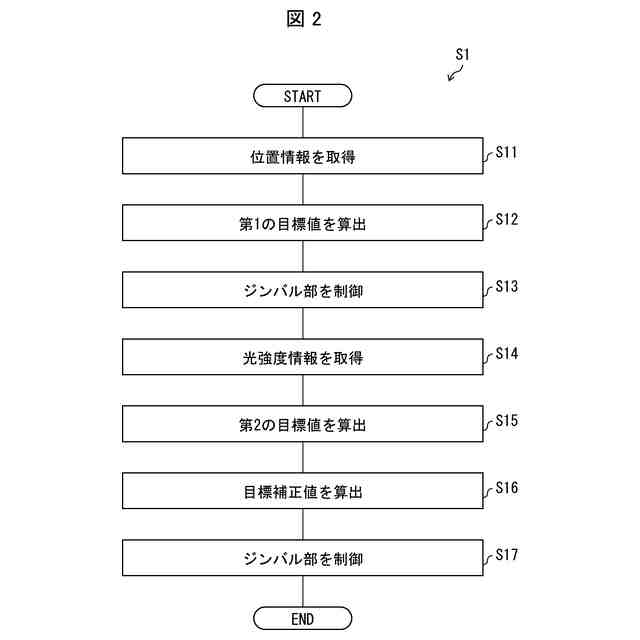
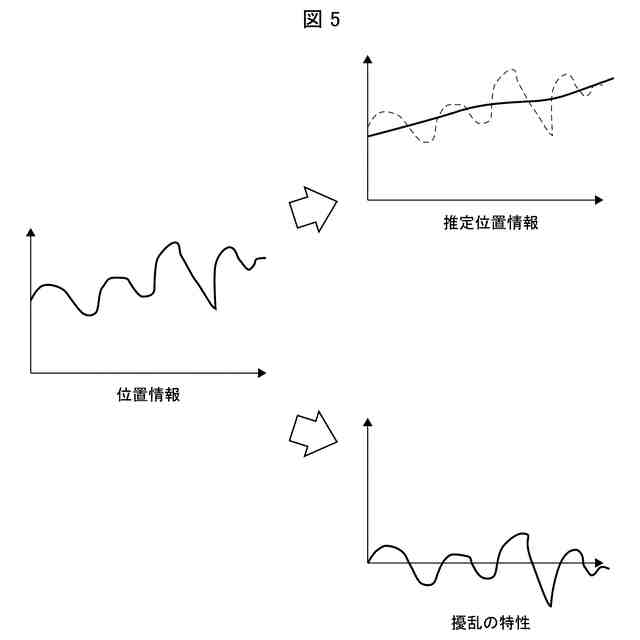
【解決手段】光空間通信装置は、位置情報を参照して第1の目標値を算出し、算出した第1の目標値に基づいてジンバル部を制御し、制御後の光強度情報を参照して算出された擾乱の特性に基づいて第2の目標値を算出し、第1の目標値と第2の目標値とを参照して目標補正値を算出し、目標補正値に基づいてジンバル部を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
光受信センサが受信した、相手局からの送信光の強度を示す光強度情報を取得する光強度情報取得手段と、
撮像装置が前記相手局からの送信光を撮像した画像に基づいて画像センサが推定した前記相手局の位置を示す位置情報を取得する位置情報取得手段と、
前記光受信センサおよび前記画像センサの向きと、前記光受信センサおよび前記画像センサの光軸方向との少なくとも何れかを変化させるジンバル部を、前記光受信センサおよび前記画像センサが前記相手局を追尾するように駆動させる第1の目標値を、前記位置情報を参照して算出する協調制御手段と、
前記第1の目標値に基づいて、前記ジンバル部を制御する追尾制御手段と、
前記位置情報または前記追尾制御手段によって第1の目標値に基づいて前記ジンバル部が制御された後の前記光強度情報を参照することによって算出した前記送信光の擾乱の特性に基づいて、前記光受信センサおよび前記画像センサが前記相手局からの送信光を追尾するように前記ジンバル部を駆動させる第2の目標値を算出する擾乱補正手段と、を備え、
前記協調制御手段は、前記第1の目標値と前記第2の目標値とを参照して、前記ジンバル部を駆動させる目標補正値を算出し、
前記追尾制御手段は、前記目標補正値に基づいて、前記ジンバル部を制御する、
光空間通信装置。
続きを表示(約 1,700 文字)
【請求項2】
前記擾乱補正手段は、前記送信光の擾乱の特性として、パン方向およびチルト方向のそれぞれにおいて、前記光強度情報が示す前記相手局からの送信光の強度が高い角度および周波数を算出する、
請求項1に記載の光空間通信装置。
【請求項3】
前記擾乱補正手段は、前記送信光の擾乱の特性として、前記位置情報から算出した推定位置情報と、前記位置情報との差分に基づいて、前記送信光のベクトル方向および共振周波数を算出する、
請求項1に記載の光空間通信装置。
【請求項4】
前記擾乱補正手段は、前記送信光の擾乱の特性として、
パン方向およびチルト方向のそれぞれにおいて、前記光強度情報が示す前記相手局からの送信光の強度が高い方向および周波数と、
前記送信光の擾乱の特性として、前記位置情報から算出した推定位置情報と、前記位置情報との差分に基づいて、前記送信光のベクトル方向および周波数と、
を算出し、算出した値を互いに比較することにより、前記第2の目標値を算出する、
請求項1に記載の光空間通信装置。
【請求項5】
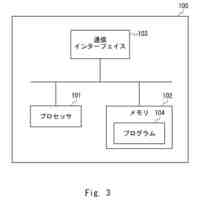
少なくとも1つのプロセッサが、
撮像装置が相手局からの送信光を撮像した画像に基づいて画像センサが推定した前記相手局の位置を示す位置情報を取得する位置情報取得処理と、
光受信センサおよび前記画像センサの向きと、前記光受信センサおよび前記画像センサの光軸方向との少なくとも何れかを変化させるジンバル部を、前記光受信センサおよび前記画像センサが前記相手局を追尾するように駆動させる第1の目標値を、前記位置情報を参照して算出する第1の協調制御処理と、
前記第1の目標値に基づいて、前記ジンバル部を制御する第1の追尾制御処理と、
前記第1の追尾制御処理において、第1の目標値に基づいて前記ジンバル部が制御された後、前記光受信センサが受信した、相手局からの送信光の強度を示す光強度情報を取得する光強度情報取得処理と、
前記位置情報または前記光強度情報を参照することによって算出した前記送信光の擾乱の特性に基づいて、前記光受信センサおよび前記画像センサが前記相手局からの送信光を追尾するように前記ジンバル部を駆動させる第2の目標値を算出する擾乱補正処理と、
前記第1の目標値と前記第2の目標値とを参照して、前記ジンバル部を駆動させる目標補正値を算出する第2の協調制御処理と、
前記目標補正値に基づいて、前記ジンバル部を制御する第2の追尾制御処理と、
を含む光空間通信方法。
【請求項6】
光空間通信装置としてコンピュータを機能させるプログラムであって、
前記コンピュータに、
光受信センサが受信した、相手局からの送信光の強度を示す光強度情報を取得する光強度情報取得処理と、
撮像装置が前記相手局からの送信光を撮像した画像に基づいて画像センサが推定した前記相手局の位置を示す位置情報を取得する位置情報取得処理と、
前記光受信センサおよび前記画像センサの向きと、前記光受信センサおよび前記画像センサの光軸方向との少なくとも何れかを変化させるジンバル部を、前記光受信センサおよび前記画像センサが前記相手局を追尾するように駆動させる第1の目標値を、前記位置情報を参照して算出する協調制御処理と、
前記第1の目標値に基づいて、前記ジンバル部を制御する追尾制御処理と、
前記位置情報または前記追尾制御処理において第1の目標値に基づいて前記ジンバル部が制御された後の前記光強度情報を参照することによって算出した前記送信光の擾乱の特性に基づいて、前記光受信センサおよび前記画像センサが前記相手局からの送信光を追尾するように前記ジンバル部を駆動させる第2の目標値を算出する擾乱補正処理と、を実行させ、
前記協調制御処理において、前記第1の目標値と前記第2の目標値とを参照して、前記ジンバル部を駆動させる目標補正値を算出させ、
前記追尾制御処理において、前記目標補正値に基づいて、前記ジンバル部を制御させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、光空間通信装置、光空間通信方法、およびプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
光空間通信において、光を出射する装置の光軸と光を受信する装置との光軸とを近付ける技術が知られている。
【0003】
例えば、特許文献1には、第1光空間通信装置と第2光空間通信装置との間において、光空間通信を行う光空間通信システムが開示されている。当該光空間通信システムでは、第1光空間通信装置は、第2光空間通信装置からの拡散光および通信光の発光状態に基づいて、発光する第1通信光の出射方向を調整し、発光する拡散光の発光状態を制御する。
【先行技術文献】
【特許文献】
【0004】
特開2023-068492号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の光空間通信システムでは、例えば大気圏内における大気擾乱といった、擾乱による影響について考慮されていない。
【0006】
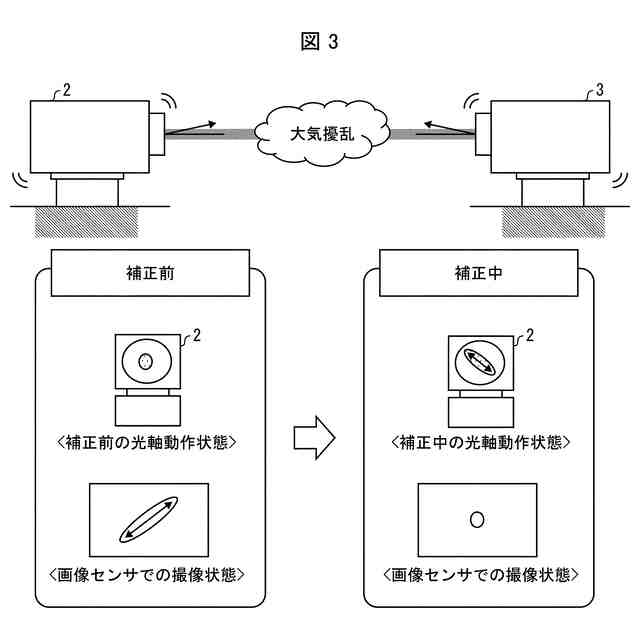
大気圏内では空気の状態が安定しないため、大気擾乱により、光が屈折したり、ぼやけたりする。大気圏内における光空間通信では、このような大気擾乱によって、受信側に光が届かなかったり、波面の状態が乱されたりしてしまう。そのため、大気圏内における光空間通信では、光軸が屈折したり揺らいだりする現象が発生し、受信した光を適切な情報として処理できない、または通信が途絶してしまうという問題がある。
【0007】
本開示は、上記の問題に鑑みてなされたものであり、その一例示的目的は、光空間通信において擾乱による影響を低減させる技術を提供することにある。
【課題を解決するための手段】
【0008】
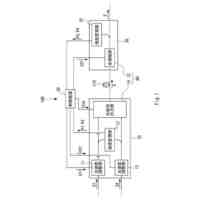
本開示の一例示的側面に係る光空間通信装置は、光受信センサが受信した、相手局からの送信光の強度を示す光強度情報を取得する光強度情報取得手段と、撮像装置が前記相手局からの送信光を撮像した画像に基づいて画像センサが推定した前記相手局の位置を示す位置情報を取得する位置情報取得手段と、前記光受信センサおよび前記画像センサの向きと、前記光受信センサおよび前記画像センサの光軸方向との少なくとも何れかを変化させるジンバル部を、前記光受信センサおよび前記画像センサが前記相手局を追尾するように駆動させる第1の目標値を、前記位置情報を参照して算出する協調制御手段と、前記第1の目標値に基づいて、前記ジンバル部を制御する追尾制御手段と、前記位置情報または前記追尾制御手段によって第1の目標値に基づいて前記ジンバル部が制御された後の前記光強度情報を参照することによって算出した前記送信光の擾乱の特性に基づいて、前記光受信センサおよび前記画像センサが前記相手局からの送信光を追尾するように前記ジンバル部を駆動させる第2の目標値を算出する擾乱補正手段と、を備え、前記協調制御手段は、前記第1の目標値と前記第2の目標値とを参照して、前記ジンバル部を駆動させる目標補正値を算出し、前記追尾制御手段は、前記目標補正値に基づいて、前記ジンバル部を制御する。
【0009】
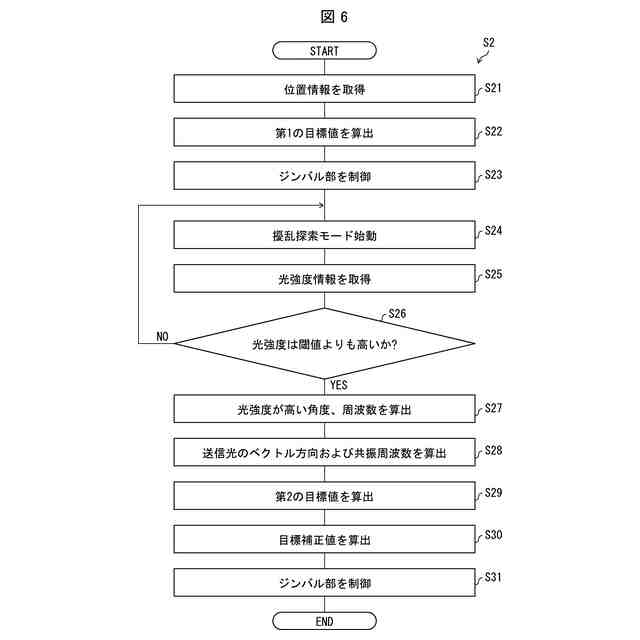
本開示の一例示的側面に係る光空間通信方法は、少なくとも1つのプロセッサが、撮像装置が相手局からの送信光を撮像した画像に基づいて画像センサが推定した前記相手局の位置を示す位置情報を取得する位置情報取得処理と、光受信センサおよび前記画像センサの向きと、前記光受信センサおよび前記画像センサの光軸方向との少なくとも何れかを変化させるジンバル部を、前記光受信センサおよび前記画像センサが前記相手局を追尾するように駆動させる第1の目標値を、前記位置情報を参照して算出する第1の協調制御処理と、前記第1の目標値に基づいて、前記ジンバル部を制御する第1の追尾制御処理と、前記第1の追尾制御処理において、第1の目標値に基づいて前記ジンバル部が制御された後、前記光受信センサが受信した、相手局からの送信光の強度を示す光強度情報を取得する光強度情報取得処理と、前記位置情報または前記光強度情報を参照することによって算出した前記送信光の擾乱の特性に基づいて、前記光受信センサおよび前記画像センサが前記相手局からの送信光を追尾するように前記ジンバル部を駆動させる第2の目標値を算出する擾乱補正処理と、前記第1の目標値と前記第2の目標値とを参照して、前記ジンバル部を駆動させる目標補正値を算出する第2の協調制御処理と、前記目標補正値に基づいて、前記ジンバル部を制御する第2の追尾制御処理と、を含む。
【0010】
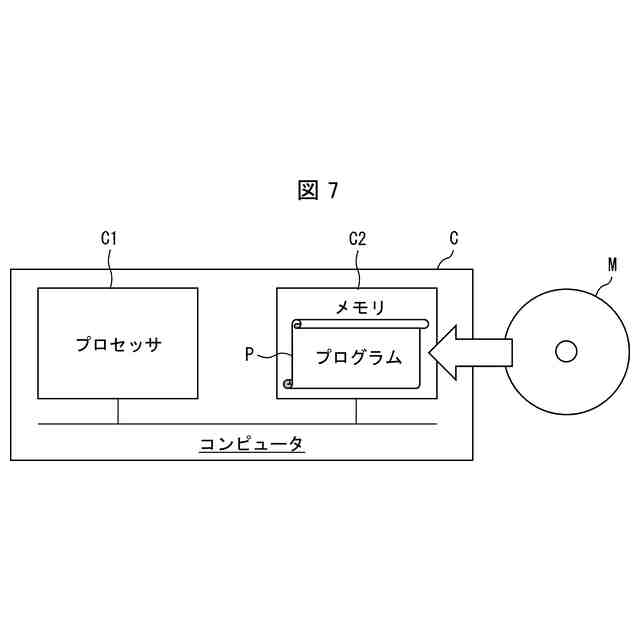
本開示の一例示的側面に係るプログラムは、光空間通信装置としてコンピュータを機能させるプログラムであって、前記コンピュータに、光受信センサが受信した、相手局からの送信光の強度を示す光強度情報を取得する光強度情報取得処理と、撮像装置が前記相手局からの送信光を撮像した画像に基づいて画像センサが推定した前記相手局の位置を示す位置情報を取得する位置情報取得処理と、前記光受信センサおよび前記画像センサの向きと、前記光受信センサおよび前記画像センサの光軸方向との少なくとも何れかを変化させるジンバル部を、前記光受信センサおよび前記画像センサが前記相手局を追尾するように駆動させる第1の目標値を、前記位置情報を参照して算出する協調制御処理と、前記第1の目標値に基づいて、前記ジンバル部を制御する追尾制御処理と、前記位置情報または前記追尾制御処理において第1の目標値に基づいて前記ジンバル部が制御された後の前記光強度情報を参照することによって算出した前記送信光の擾乱の特性に基づいて、前記光受信センサおよび前記画像センサが前記相手局からの送信光を追尾するように前記ジンバル部を駆動させる第2の目標値を算出する擾乱補正処理と、を実行させ、前記協調制御処理において、前記第1の目標値と前記第2の目標値とを参照して、前記ジンバル部を駆動させる目標補正値を算出させ、前記追尾制御処理において、前記目標補正値に基づいて、前記ジンバル部を制御させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
電子装置
10日前
日本電気株式会社
処理装置
1か月前
日本電気株式会社
システム及び方法
11日前
日本電気株式会社
測位装置及びその方法
27日前
日本電気株式会社
取付構造及び半導体部品
1か月前
日本電気株式会社
光通信システム及び光通信方法
1か月前
日本電気株式会社
情報処理システム及びその方法
2日前
日本電気株式会社
光送信器及び光送信器の制御方法
1か月前
日本電気株式会社
電子装置及びネットワークシステム
10日前
日本電気株式会社
測定装置、測定方法及びプログラム
6日前
日本電気株式会社
測定装置、測定方法及びプログラム
6日前
日本電気株式会社
超伝導デバイスおよびその製造方法
1か月前
日本電気株式会社
検証可能証明書システム、方法、記録媒体
3日前
日本電気株式会社
判定装置、判定方法、及び判定プログラム
11日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
6日前
日本電気株式会社
画像生成装置、画像生成方法及び、プログラム
9日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
1か月前
日本電気株式会社
情報生成装置、情報生成方法およびプログラム
9日前
日本電気株式会社
配送管理装置、配送管理方法、及びプログラム
17日前
日本電気株式会社
情報提供装置、情報提供方法、及びプログラム
1か月前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
26日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
1か月前
日本電気株式会社
光通信システム、光信号制御方法及び光通信装置
26日前
日本電気株式会社
光ネットワークシステム、制御方法、プログラム
25日前
日本電気株式会社
情報処理システム、情報処理方法及びプログラム
3日前
日本電気株式会社
測位方法、移動体、プログラム及び測位システム
25日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
4日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
2日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
2日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
5日前
日本電気株式会社
管理装置、管理システム、管理方法、及びプログラム
1か月前
日本電気株式会社
通信システム、監視装置、監視方法、及びプログラム
24日前
日本電気株式会社
電子決済支援装置、システム、方法、及びプログラム
2日前
日本電気株式会社
車両追跡方法、車両追跡システム、およびプログラム
1か月前
日本電気株式会社
光空間通信装置、光空間通信方法、およびプログラム
5日前
日本電気株式会社
調査装置、通信システム、調査方法、及びプログラム
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ