TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115384
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2025008412
出願日
2025-01-21
発明の名称
故障検出方法、装置、機器及び記憶媒体
出願人
チョーチアン ヘンイー ペトロケミカル カンパニー,リミテッド
,
ハンチョウ イートン ニュー マテリアル カンパニー リミテッド
代理人
弁理士法人太陽国際特許事務所
主分類
G06T
7/00 20170101AFI20250730BHJP(計算;計数)
要約
【課題】部材の故障状況をより効果的に監視する故障検出方法、装置、機器及び記憶媒体を提供する。
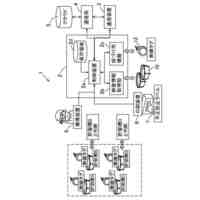
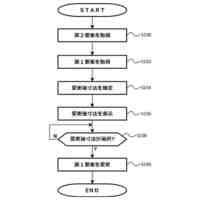
【解決手段】方法は、仮撚機の仮撚り部材に対して画像取得を行って対象画像を取得することと、アテンションネットワークにおける少なくとも一つのアテンションモジュールに基づいて第1の融合特徴を構築することと、を含む。各アテンションモジュールは、第1のサブモジュールと第2のサブモジュールを含み、第1のサブモジュールは、第1の視野範囲内の細粒度特徴及び第2の視野範囲内の粗粒度特徴について第1のサブ特徴を構築し、第2のサブモジュールは、第2の入力情報に基づいて構築された残差を用いてマスクマップを取得する。方法はまた、第1の融合特徴をエンコーダーネットワークに入力してエンコード特徴を取得することと、デコーダーネットワークに基づいてエンコード特徴に対してデコード操作を行ってデコード特徴を取得することと、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
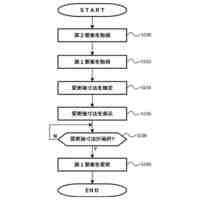
故障検出方法であって、
仮撚機の仮撚り部材に対して画像取得を行って対象画像を取得することと、
アテンションネットワークにおける少なくとも一つのアテンションモジュールに基づいて第1の融合特徴を構築すること(ここで、各アテンションモジュールについて、前記アテンションモジュールは、第1のサブモジュールと第2のサブモジュールを含み、前記第1のサブモジュールは、第1の入力情報における第1の視野範囲内の細粒度特徴及び第2の視野範囲内の粗粒度特徴について第1のサブ特徴を構築し、前記第2のサブモジュールは、第2の入力情報に基づいて構築された残差を用いてマスクマップを取得し、前記アテンションモジュールの出力特徴は、前記マスクマップと前記第1のサブ特徴を掛けて取得されたものであり、前記第1の視野範囲は、前記第2の視野範囲よりも小さくなる)と、
前記第1の融合特徴をエンコーダーネットワークに入力してエンコード特徴を取得すこと(ここで、前記エンコーダーネットワークは、複数のエンコーダーを含み、各エンコーダーは、対応するエンコードサブ特徴を出力し、前記エンコード特徴は、少なくとも一つのエンコーダーのエンコードサブ特徴を含む)と、
デコーダーネットワークに基づいて前記エンコード特徴に対してデコード操作を行ってデコード特徴を取得すること(ここで、前記デコーダーネットワークは、複数のデコーダーを含み、各デコーダーは、対応するデコードサブ特徴を出力し、前記デコード特徴は、複数のデコーダーのデコードサブ特徴を含む)と、
前記デコード特徴における各デコードサブ特徴を融合して第2の融合特徴を取得することと、
前記第2の融合特徴を多層パーセプトロンに入力して前記仮撚機の仮撚り部材の故障検出結果を取得することと、を含むことを特徴とする故障検出方法。
続きを表示(約 4,200 文字)
【請求項2】
前記アテンションネットワークにおける1個目のアテンションモジュールについて、
前記1個目のアテンションモジュールの第1のサブモジュールの第1の入力情報は、前記対象画像であり、
前記1個目のアテンションモジュールの第2のサブモジュールの第2の入力情報は、前記対象画像及び前記仮撚り部材の少なくとも一枚の過去取得画像を含み、且つ、前記対象画像といずれか一枚の過去取得画像との間の取得時間間隔は、予め設定された時間長さよりも小さくなり、
前記アテンションネットワークにおける1個目のアテンションモジュール以外のいずれかのアテンションモジュールについて、
前記いずれかのアテンションモジュールの第1のサブモジュールの第1の入力情報は、前記いずれかのアテンションモジュールの一つ前のアテンションモジュールが出力した出力特徴であり、
前記いずれかのアテンションモジュールの第2のサブモジュールの第2の入力情報は、前記いずれかのアテンションモジュールの一つ前のアテンションモジュールの第2のサブモジュールが出力した残差である、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記第1の入力情報における第1の視野範囲内の細粒度特徴及び第2の視野範囲内の粗粒度特徴について第1のサブ特徴を構築することは、
前記第1の入力情報において複数の対象点を確定し、各対象点について、それぞれ、前記対象点を中心とする前記第1の視野範囲内で前記対象点の細粒度特徴を抽出し、前記対象点を中心とする前記第2の視野範囲内で前記対象点の粗粒度特徴を抽出し、前記細粒度特徴と前記粗粒度特徴を結合して前記対象点の初期特徴を取得し、前記対象点の前記初期特徴を非線形マッピング方法により前記対象点の特徴値にマッピングすることと、
前記複数の対象点の特徴値を、各対象点の前記対象画像における位置情報に従って結合して前記第1のサブ特徴を取得することと、を含む、
ことを特徴とする請求項2に記載の方法。
【請求項4】
前記対象点を中心とする前記第1の視野範囲内で前記対象点の細粒度特徴を抽出することは、
前記対象点の前記第1の入力情報における特徴値を前記対象点の第1のクエリ特徴として確定することと、
前記対象点の前記第1の入力情報における位置座標を中心として前記対象点の前記第1の視野範囲を確定することと、
前記第1の視野範囲内の前記対象点以外の特徴点の特徴値に基づいて、前記対象点の第1のキー特徴及び第1のバリュー特徴を構築することと、
前記第1のクエリ特徴、前記第1のキー特徴及び前記第1のバリュー特徴に基づいて、前記対象点の細粒度特徴を確定することと、を含む、
ことを特徴とする請求項3に記載の方法。
【請求項5】
前記対象点を中心とする前記第2の視野範囲内で前記対象点の粗粒度特徴を抽出することは、
前記対象点の前記第1の入力情報における位置座標を中心として前記対象点の前記第2の視野範囲を確定することと、
前記第2の視野範囲内の前記対象点以外の特徴点の特徴値に基づいて、前記対象点の第2のキー特徴及び第2のバリュー特徴を構築することと、
前記対象点の第1のクエリ特徴、前記第2のキー特徴及び前記第2のバリュー特徴に基づいて、前記対象点の粗粒度特徴を確定することと、を含み、
前記対象点の前記第1の入力情報における特徴値は、前記対象点の第1のクエリ特徴である、
ことを特徴とする請求項3に記載の方法。
【請求項6】
前記第2の入力情報に基づいて構築された残差を用いてマスクマップを取得することは、
フーリエフィルターを採用して前記第2の入力情報に対してフーリエ変換を行って時変成分を取得することと、
時変成分を、ニューラルネットワークに基づいて構築された推定モジュール入力して前記時変成分の推定値を取得することと、
前記時変成分と前記時変成分の推定値との間の残差を確定して前記マスクマップを取得することと、を含む、
ことを特徴とする請求項2に記載の方法。
【請求項7】
前記エンコーダーネットワークにおけるエンコーダーは、前記デコーダーネットワークにおけるデコーダーと一対一に対応しており、
前記デコーダーネットワークに基づいて前記エンコード特徴に対してデコード操作を行ってデコード特徴を取得することは、
前記デコーダーネットワークにおける各対象デコーダーについて、前記対象デコーダーに対応するエンコーダーが出力するエンコードサブ特徴を前記対象デコーダーの第3のクエリ特徴として取得するという操作と、前記対象デコーダーが1個目のデコーダーである場合、前記エンコーダーネットワークにおけるすべてのエンコーダーのエンコードサブ特徴を取得し、前記対象デコーダーの第3のバリュー特徴及び第3のキー特徴を構築するという操作と、前記対象デコーダーが前記1個目のデコーダー以外のいずれかのデコーダーである場合、前記対象デコーダーの前の各先行デコーダーが出力するデコードサブ特徴を好ましいサブ特徴として取得し、各エンコーダーのエンコードサブ特徴により構築された特徴集について、前記好ましいサブ特徴を用いて前記先行デコーダーに対応するエンコーダーのエンコードサブ特徴を置き替え、前記対象デコーダーの第3のバリュー特徴及び第3のキー特徴を取得するという操作と、前記第3のクエリ特徴、前記第3のバリュー特徴及び前記第3のキー特徴を前記対象デコーダーに入力し、前記対象デコーダーが出力するデコードサブ特徴を取得するという操作とを実行することと、
各デコーダーのデコードサブ特徴に基づいて前記デコード特徴を構築することと、を含む、
ことを特徴とする請求項1~6のいずれか1項に記載の方法。
【請求項8】
前記第3のクエリ特徴、前記第3のバリュー特徴及び前記第3のキー特徴を前記対象デコーダーに入力し、前記対象デコーダーが出力するデコードサブ特徴を取得することは、
前記第3のクエリ特徴、前記第3のキー特徴及び前記第3のバリュー特徴をミックスアテンションメカニズムモジュールに入力して第1の中間特徴を取得することと、
前記第1の中間特徴と前記第3のクエリ特徴を融合して層正規化モジュールに入力し、第2の中間特徴を取得することと、
前記第2の中間特徴をフィードフォワードネットワークに入力して第3の中間特徴を取得することと、
前記第2の中間特徴と前記第3の中間特徴を融合して前記対象デコーダーが出力するデコードサブ特徴を取得することと、を含む、
ことを特徴とする請求項7に記載の方法。
【請求項9】
故障検出装置であって、
仮撚機の仮撚り部材に対して画像取得を行って対象画像を取得するための取得ユニットと、
アテンションネットワークにおける少なくとも一つのアテンションモジュールに基づいて、第1の融合特徴を構築するための構築ユニット(ここで、各アテンションモジュールについて、前記アテンションモジュールは、第1のサブモジュールと第2のサブモジュールを含み、前記第1のサブモジュールは、第1の入力情報における第1の視野範囲内の細粒度特徴及び第2の視野範囲内の粗粒度特徴について第1のサブ特徴を構築し、前記第2のサブモジュールは、第2の入力情報に基づいて構築された残差を用いてマスクマップを取得し、前記アテンションモジュールの出力特徴は、前記マスクマップと前記第1のサブ特徴を掛けて取得されたものであり、前記第1の視野範囲は、前記第2の視野範囲よりも小さくなる)と、
前記第1の融合特徴をエンコーダーネットワークに入力してエンコード特徴を取得するためのエンコードユニット(ここで、前記エンコーダーネットワークは、複数のエンコーダーを含み、各エンコーダーは、対応するエンコードサブ特徴を出力し、前記エンコード特徴は、少なくとも一つのエンコーダーのエンコードサブ特徴を含む)と、
デコーダーネットワークに基づいて前記エンコード特徴に対してデコード操作を行ってデコード特徴を取得するためのデコードユニット(ここで、前記デコーダーネットワークは、複数のデコーダーを含み、各デコーダーは、対応するデコードサブ特徴を出力し、前記デコード特徴は、複数のデコーダーのデコードサブ特徴を含む)と、
前記デコード特徴における各デコードサブ特徴を融合して第2の融合特徴を取得するための融合ユニットと、
前記第2の融合特徴を多層パーセプトロンに入力して前記仮撚機の仮撚り部材の故障検出結果を取得するための予測ユニットと、を含む、
ことを特徴とする故障検出装置。
【請求項10】
前記アテンションネットワークにおける1個目のアテンションモジュールについて、
前記1個目のアテンションモジュールの第1のサブモジュールの第1の入力情報は、前記対象画像であり、
前記1個目のアテンションモジュールの第2のサブモジュールの第2の入力情報は、前記対象画像及び前記仮撚り部材の少なくとも一枚の過去取得画像を含み、且つ、前記対象画像といずれか一枚の過去取得画像との間の取得時間間隔は、予め設定された時間長さよりも小さくなり、
前記アテンションネットワークにおける1個目のアテンションモジュール以外のいずれかのアテンションモジュールについて、
前記いずれかのアテンションモジュールの第1のサブモジュールの第1の入力情報は、前記いずれかのアテンションモジュールの一つ前のアテンションモジュールが出力した出力特徴であり、
前記いずれかのアテンションモジュールの第2のサブモジュールの第2の入力情報は、前記いずれかのアテンションモジュールの一つ前のアテンションモジュールの第2のサブモジュールが出力した残差である、
ことを特徴とする請求項9に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、コンピューターの技術分野に関し、特に人工知能、コンピュータービジョン、画像処理などの技術分野に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
仮撚プロセスの工業シーンでは、仮撚機は紡糸プロセスフローにおいて重要な役割を果たすものである。関連技術では、仮撚作業場に係る糸は、POY原糸と略称されるPOY(Pre Oriented Yarn、事前配向糸)、及びDTY(Draw Textured Yarn、延伸加工糸)を含む。
【0003】
DTY糸は、仮撚機がPOY原糸を処理することで得られたものである。仮撚機は、仮撚り部材を含む。仮撚り部材は、POY原糸に対する仮撚り操作を行う。仮撚機が頻繁的に使用される場合、仮撚機の仮撚り部材は、摩耗が発生する可能性があり、ひいては仮撚プロセスフローに影響することがある。そのため、仮撚機の仮撚り部材を自動的に監視することを実現するということは、従来からの課題の一つである。
【発明の概要】
【0004】
本開示は、仮撚プロセスフローにおいて仮撚り部材に対する監視を実現するための故障検出方法、装置、機器及び記憶媒体を提供する。
【0005】
第1の局面では、本開示は、
仮撚機の仮撚り部材に対して画像取得を行って対象画像を取得することと、
アテンションネットワークにおける少なくとも一つのアテンションモジュールに基づいて第1の融合特徴を構築することと、ここで、各アテンションモジュールについて、前記アテンションモジュールは、第1のサブモジュールと第2のサブモジュールを含み、前記第1のサブモジュールは、第1の入力情報における第1の視野範囲内の細粒度特徴及び第2の視野範囲内の粗粒度特徴について第1のサブ特徴を構築し、前記第2のサブモジュールは、第2の入力情報に基づいて構築された残差を用いてマスクマップを取得し、前記アテンションモジュールの出力特徴は、前記マスクマップと前記第1のサブ特徴を掛けて取得されたものであり、前記第1の視野範囲は、前記第2の視野範囲よりも小さくなり、
前記第1の融合特徴をエンコーダーネットワークに入力してエンコード特徴を取得することと、ここで、前記エンコーダーネットワークは、複数のエンコーダーを含み、各エンコーダーは、対応するエンコードサブ特徴を出力し、前記エンコード特徴は、少なくとも一つのエンコーダーのエンコードサブ特徴を含み、
デコーダーネットワークに基づいて前記エンコード特徴に対してデコード操作を行ってデコード特徴を取得することと、ここで、前記デコーダーネットワークは、複数のデコーダーを含み、各デコーダーは、対応するデコードサブ特徴を出力し、前記デコード特徴は、複数のデコーダーのデコードサブ特徴を含み、
前記デコード特徴における各デコードサブ特徴を融合して第2の融合特徴を取得することと、
前記第2の融合特徴を多層パーセプトロンに入力して前記仮撚機の仮撚り部材の故障検出結果を取得することと、を含むことを特徴とする故障検出方法を提出する。
【0006】
第2の局面では、本開示は、
仮撚機の仮撚り部材に対して画像取得を行って対象画像を取得するための取得ユニットと、
アテンションネットワークにおける少なくとも一つのアテンションモジュールに基づいて第1の融合特徴を構築するための構築ユニットと、ここで、各アテンションモジュールについて、前記アテンションモジュールは、第1のサブモジュールと第2のサブモジュールを含み、前記第1のサブモジュールは、第1の入力情報における第1の視野範囲内の細粒度特徴及び第2の視野範囲内の粗粒度特徴について第1のサブ特徴を構築し、前記第2のサブモジュールは、第2の入力情報に基づいて構築された残差を用いてマスクマップを取得し、前記アテンションモジュールの出力特徴は、前記マスクマップと前記第1のサブ特徴を掛けて取得されたものであり、前記第1の視野範囲は、前記第2の視野範囲よりも小さくなり、
前記第1の融合特徴をエンコーダーネットワークに入力してエンコード特徴を取得するためのエンコードユニットと、前記エンコーダーネットワークは、複数のエンコーダーを含み、各エンコーダーは、対応するエンコードサブ特徴を出力し、前記エンコード特徴は、少なくとも一つのエンコーダーのエンコードサブ特徴を含み、
デコーダーネットワークに基づいて前記エンコード特徴に対してデコード操作を行ってデコード特徴を取得するためのデコードユニットと、ここで、前記デコーダーネットワークは、複数のデコーダーを含み、各デコーダーは、対応するデコードサブ特徴を出力し、前記デコード特徴は、複数のデコーダーのデコードサブ特徴を含み、
前記デコード特徴における各デコードサブ特徴を融合して第2の融合特徴を取得するための融合ユニットと、
前記第2の融合特徴を多層パーセプトロンに入力して前記仮撚機の仮撚り部材の故障検出結果を取得するための予測ユニットと、を含むことを特徴とする故障検出装置を提供する。
【0007】
第3の局面では、
少なくとも一つのプロセッサーと、
当該少なくとも一つのプロセッサーに通信可能に接続されたメモリとを含む電子機器であって、
当該メモリには、当該少なくとも一つのプロセッサーにより実行することができる指令が記憶されており、当該指令は、当該少なくとも一つのプロセッサーに本開示の実施例のいずれかの方法を実行させるように、当該少なくとも一つのプロセッサーにより実行される、電子機器を提供する。
【0008】
第4の局面では、コンピューター指令が記憶された非一時的なコンピューター読み取り可能な記憶媒体を提供し、当該コンピューター指令は、当該コンピューターに本開示の実施例のいずれかの方法を実行させるためのものである。
【0009】
第5の局面では、コンピュータープログラムを含むコンピュータープログラム製品を提供し、当該コンピュータープログラムは、プロセッサーにより実行される時に、本開示の実施例のいずれかの方法を実現する。
【0010】
本開示の実施例による方式に基づいて、仮撚機の仮撚り部材に対する自動検出フローを実現した。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
裁判のAI化
27日前
個人
フラワーコートA
6日前
個人
情報処理システム
1か月前
個人
検査システム
1か月前
個人
記入設定プラグイン
1か月前
個人
介護情報提供システム
13日前
個人
設計支援システム
19日前
個人
設計支援システム
19日前
株式会社サタケ
籾摺・調製設備
1か月前
個人
不動産売買システム
1か月前
キヤノン電子株式会社
携帯装置
1か月前
株式会社カクシン
支援装置
22日前
個人
アンケート支援システム
8日前
個人
備蓄品の管理方法
1か月前
個人
ジェスチャーパッドのガイド部材
12日前
株式会社BONNOU
管理装置
1か月前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
9日前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
個人
リテールレボリューションAIタグ
5日前
ホシデン株式会社
タッチ入力装置
1か月前
東洋電装株式会社
操作装置
1か月前
東洋電装株式会社
操作装置
1か月前
株式会社東芝
電子機器
1か月前
株式会社寺岡精工
システム
12日前
株式会社ワコム
電子消去具
1か月前
株式会社アジラ
移動方向推定装置
7日前
キヤノン電子株式会社
名刺管理システム
1か月前
アスエネ株式会社
排水量管理方法
1か月前
株式会社ライト
情報処理装置
1か月前
飛鳥興産株式会社
物品買取システム
1日前
日本電気株式会社
システム及び方法
21日前
個人
パターン抽出方法及び通信多重化方法
1か月前
株式会社JVCケンウッド
管理装置
1か月前
株式会社アザース
企業連携システム
13日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ