TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025118569
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2025013907
出願日
2025-01-30
発明の名称
ロボットデバイスを制御するための挙動ツリーを生成するための方法
出願人
ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング
,
ROBERT BOSCH GMBH
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06N
3/0475 20230101AFI20250805BHJP(計算;計数)
要約
【課題】ロボットデバイスを制御するための挙動ツリーを生成するためのデバイス及び方法を提供する。
【解決手段】種々の実施形態によれば、ロボットデバイスを制御するための挙動ツリーを生成するための方法であって、挙動ツリー知識グラフにするために複数の所定の挙動ツリーと背景知識とを組み合わせることと、潜在空間において挙動ツリー知識グラフを表現することと、ロボットデバイスの所望の挙動を記述するプロンプトから、プロンプト表現グラフを抽出することと、挙動ツリー知識グラフによって指定された関係に従ってプロンプト表現グラフを補足することと、補足されたプロンプト表現グラフとの類似度に応じて挙動ツリー知識グラフのサブグラフを選択することと、プロンプト及び挙動ツリー知識グラフからの知識に従って選択されたサブグラフを調整することによってロボットデバイスを制御するための挙動ツリーを生成することと、を含む方法が提供される。
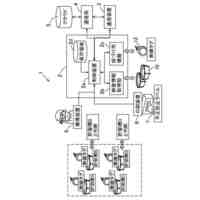
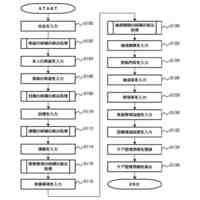
【選択図】図3
特許請求の範囲
【請求項1】
ロボットデバイス(101)を制御するための挙動ツリー(215)を生成するための方法であって、
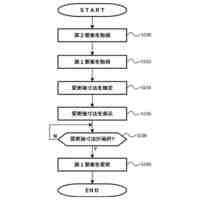
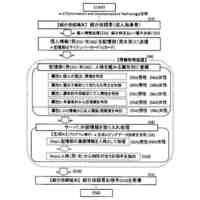
挙動ツリー知識グラフ(202)にするために複数の所定の挙動ツリー(201)と背景知識とを組み合わせること(301)と、
潜在空間(207)において前記挙動ツリー知識グラフ(202)を知識グラフ埋め込み方法(205、211)によって潜在空間要素の複数の複式のクラスタ(206)の形態で表現すること(302)であって、各クラスタ(206)は、前記挙動ツリー知識グラフ(202)のサブグラフを表現する、こと(302)と、
前記ロボットデバイス(101)の所望の挙動を記述するプロンプト(208)から、前記プロンプト(208)内の用語をノードとして表現しかつ前記プロンプト(208)内に示される前記用語間の関係をエッジとして表現するプロンプト表現グラフ(210)を抽出すること(303)と、
前記プロンプト(208)に示された複数の用語及び/又は前記プロンプト(208)に示された1つ以上の用語と前記挙動ツリー知識グラフ(202)に表現された他の用語との間の、前記挙動ツリー知識グラフ(202)によって指定された関係に従って、1つ以上のノード及び/又は1つ以上のエッジで前記プロンプト表現グラフ(210)を補足すること(304)と、
補足された前記プロンプト表現グラフ(210)を前記潜在空間(207)内の追加のクラスタ(212)として前記知識グラフ埋め込み方法(205、211)によって表現すること(305)と、
前記複数のクラスタのうちの前記クラスタ(206)との前記追加のクラスタ(212)の類似度を決定すること(306)と、
前記サブグラフを表現する前記クラスタ(206)の前記追加のクラスタ(212)との前記類似度に応じて、前記挙動ツリー知識グラフ(202)の前記サブグラフのうちの1つを選択すること(307)と、
選択された前記サブグラフを前記プロンプト(208)及び前記挙動ツリー知識グラフ(202)からの知識に従って調整することによって、前記ロボットデバイス(101)を制御するための前記挙動ツリー(215)を生成すること(308)と、
を含む方法。
続きを表示(約 1,000 文字)
【請求項2】
入力として前記プロンプト(208)が供給される自然言語テキストに対して動作するように構成された機械学習モデル(すなわち、自然言語処理モデル、例えば大規模言語モデル(LLM))によって、前記プロンプト表現グラフ(210)を抽出することを含む、請求項1に記載の方法。
【請求項3】
前記サブグラフを選択することは、前記挙動ツリー知識グラフ(202)の前記サブグラフを選択することであって、前記挙動ツリー知識グラフ(202)の当該サブグラフが表現される、当該サブグラフのクラスタ(206)が、前記追加のクラスタ(212)と最も高い類似度を有する、前記挙動ツリー知識グラフ(202)の前記サブグラフを選択することを含む、請求項1又は2に記載の方法。
【請求項4】
前記プロンプト表現グラフ(210)が、前記挙動ツリー知識グラフ(202)に含まれない用語及び/又は関係についての1つ以上のノード及び/又は1つ以上のエッジを含むように、前記プロンプト(208)を生成することを含む、請求項1乃至3のいずれか一項に記載の方法。
【請求項5】
生成された前記挙動ツリーを前記挙動ツリー知識グラフ(202)と組み合わせることを更に含む、請求項1乃至4のいずれか一項に記載の方法。
【請求項6】
ロボットデバイス(101)を制御するための方法であって、
前記ロボットデバイス(101)の所望の挙動をテキストプロンプト(208)で記述することと、
請求項1乃至5のいずれか一項に記載の、ロボットデバイス(101)を制御するための挙動ツリー(215)を生成することと、
生成された前記挙動ツリーに従って前記ロボットデバイス(101)を制御することと、
を含む方法。
【請求項7】
請求項1乃至6のいずれか一項に記載の方法を実施するように構成されたデータ処理デバイス(105)。
【請求項8】
コンピュータによって実行されるときに、請求項1乃至6のいずれか一項に記載の方法を前記コンピュータに実施させるための命令を含むコンピュータプログラム。
【請求項9】
コンピュータによって実行されるときに、請求項1乃至6のいずれか一項に記載の方法を前記コンピュータに実施させるための命令を含むコンピュータ可読媒体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットデバイスを制御するための挙動ツリーを生成するためのデバイス及び方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
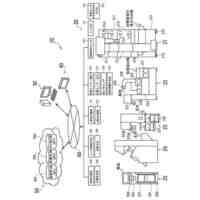
ロボットデバイスは、種々の状況においてロボットがとるべきアクションと、ロボットデバイスが尊重すべき制約とを示す挙動ツリーを使用して制御することができる。ロボット工学における挙動ツリーは、自律的挙動を定義及び実行するための構造化されたモジュール式フレームワークを提供することを目的としている。それらは、複雑なタスクを管理可能なモジュールに分解し、より容易な設計、修正及び再利用性を可能にする。これは、明確な意思決定論理を促進し、ロボット挙動の効率的な検証及び試験を容易にし、多様な環境におけるそれらの効果的な動作に寄与している。
【0003】
挙動ツリーは、専門家によって手動で生成することができる。しかし、これには、以下のような複数の欠点がある
・時間がかかる。挙動ツリーを手動で作成することは、特に複雑なタスク又はシナリオの場合、時間集約的なプロセスであり得る。これは、慎重な計画、設計及び実装を必要とし、リソース集約的であり得る。
・専門知識に依存する。効果的な手動の挙動ツリー生成は、ドメイン及び特定のシステム要件の深い理解を必要とする。この専門知識は、常に容易に利用可能であるとは限らず、潜在的な設計上の欠点につながる。
・ヒューマンエラーを起こしやすい。挙動ツリーは人間によって作成されるため、設計又は実装において間違いを起こす可能性がより高い。これらのエラーは、システムにおける予期しない又は誤った挙動につながる可能性がある。
・柔軟性に欠ける。挙動ツリーが手動で設計され、実装されると、予期しない状況又は動的な状況に適応する際の柔軟性が低下する可能性がある。大幅な変更を行うことは、設計全体の再評価を必要とする場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従って、ロボットデバイス制御のための挙動ツリーの自動生成のための効率的な手法が望ましい。
【課題を解決するための手段】
【0005】
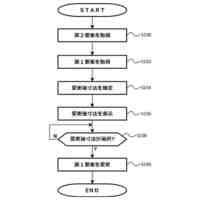
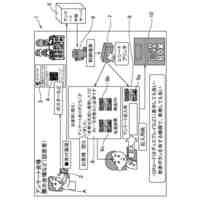
種々の実施形態によれば、ロボットデバイスを制御するための挙動ツリーを生成するための方法が提供され、本方法は、挙動ツリー知識グラフにするために複数の所定の挙動ツリーと背景知識とを組み合わせることと、潜在空間において前記挙動ツリー知識グラフを知識グラフ埋め込み方法によって潜在空間要素の複数の複式のクラスタの形態で表現することであって、各クラスタは、前記挙動ツリー知識グラフのサブグラフを表現する、ことと、前記ロボットデバイスの所望の挙動を記述するプロンプトから、前記プロンプト内の用語をノードとして表現しかつ前記プロンプト内に示される前記用語間の関係をエッジとして表現するプロンプト表現グラフを抽出することと、前記プロンプトに示された複数の用語及び/又は前記プロンプトに示された1つ以上の用語と前記挙動ツリー知識グラフに表現された他の用語との間の、前記挙動ツリー知識グラフによって指定された関係に従って、1つ以上のノード及び/又は1つ以上のエッジで前記プロンプト表現グラフを補足することと、補足された前記プロンプト表現グラフを前記潜在空間内の追加のクラスタとして前記知識グラフ埋め込み方法によって表現することと、前記複数のクラスタのうちの前記クラスタとの前記追加のクラスタの類似度を決定することと、前記サブグラフを表現する前記クラスタの前記追加のクラスタとの前記類似度に応じて、前記挙動ツリー知識グラフの前記サブグラフのうちの1つを選択することと、選択された前記サブグラフを前記プロンプト及び前記挙動ツリー知識グラフからの知識に従って調整することによって、前記ロボットデバイスを制御するための前記挙動ツリーを生成することと、を含む。
【0006】
上述の方法は、所望の挙動が、挙動ツリー知識グラフに含まれるドメイン知識及び専門知識によって強化されるテキストプロンプトによって指定され得るため、ユーザにとって低い負担で所与のタスクに適した挙動ツリーの自動生成を可能にする。
【0007】
(上述した方法によって提供されるような)挙動ツリーの自動生成は、人間-ロボット相互作用プロセスを合理化することを可能にする。従って、人間は、新しい又は特定のシナリオのためにロボットの挙動を容易に拡張又は調整することができる。
【0008】
挙動ツリーの生成において挙動ツリー知識グラフを利用することによってドメイン知識を活用すること、すなわち、知識グラフにおいて表現されるドメイン固有の知識は、以下のことを可能にする。
・ドメイン専門知識の利用:ドメイン固有知識グラフは、ドメインに固有のエンティティ、関係及び概念についての詳細な情報を提供する。これは、ドメインのより深い理解を有し、より正確でコンテキスト的に関連する挙動ツリーを生成することを可能にする。
・改善されたコンテキスト理解:ドメイン固有の情報を統合することは、情報が提示されるコンテキストのより良い理解を可能にする。これは、ドメイン固有の概念及び専門用語の微妙な理解を必要とするタスクにとって特に重要である。
・強化されたファクト検証及び情報検索:ドメイン固有の知識グラフを介して、ファクトを検証し、特定のドメインに関連する正確な情報を検索することが可能である。これは、情報の精度及び信頼性が最重要である用途にとって重要である。
・調整された応答生成:上述の方法は、応答、すなわち、テキスト入力に調整された挙動ツリーを生成することができる。これは、精度が重要であるロボット操作のような領域において特に重要である。
・曖昧性の低減:ドメイン固有の知識グラフは、異なるコンテキストにおいて複数の意味を有し得る用語又は概念の曖昧性を除去するのに役立ち得る。これは、曖昧又は不正確な挙動ツリーを生成する可能性を低減する。
・既存のシステムとのより良好な統合:知識グラフの形態の構造化された情報は、そのドメイン内の既存のシステム及びワークフローにシームレスに統合することができ、強化された能力及び効率を提供する。
【0009】
以下において、種々の例が与えられる。
【0010】
実施例1は、上述したようなロボットデバイスを制御するための挙動ツリーを生成するための方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
裁判のAI化
1か月前
個人
フラワーコートA
20日前
個人
情報処理システム
1か月前
個人
工程設計支援装置
12日前
個人
検査システム
1か月前
個人
介護情報提供システム
27日前
個人
設計支援システム
1か月前
個人
設計支援システム
1か月前
個人
携帯情報端末装置
13日前
個人
結婚相手紹介支援システム
9日前
キヤノン電子株式会社
携帯装置
1か月前
株式会社サタケ
籾摺・調製設備
1か月前
株式会社カクシン
支援装置
1か月前
個人
備蓄品の管理方法
1か月前
個人
アンケート支援システム
22日前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
個人
ジェスチャーパッドのガイド部材
26日前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
23日前
大阪瓦斯株式会社
住宅設備機器
6日前
東洋電装株式会社
操作装置
1か月前
個人
リテールレボリューションAIタグ
19日前
東洋電装株式会社
操作装置
1か月前
アスエネ株式会社
排水量管理方法
1か月前
株式会社やよい
美容支援システム
2日前
株式会社寺岡精工
システム
26日前
株式会社アジラ
移動方向推定装置
21日前
ホシデン株式会社
タッチ入力装置
1か月前
株式会社村田製作所
ラック
8日前
キヤノン電子株式会社
名刺管理システム
1か月前
株式会社アザース
企業連携システム
27日前
株式会社JVCケンウッド
管理装置
1か月前
株式会社ゼロワン
ケア支援システム
12日前
飛鳥興産株式会社
物品買取システム
15日前
株式会社ゼロワン
ケア支援システム
12日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ