TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119373
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2024014244
出願日
2024-02-01
発明の名称
アクセル装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
B60K
26/02 20060101AFI20250806BHJP(車両一般)
要約
【課題】反力を適切に付加可能なアクセル装置を提供する。
【解決手段】アクセル装置1は、ペダルレバー20と、モータ31と、動力伝達機構40と、制御部60と、を備える。ペダルレバー20は、踏み込みに応じて動作可能である。モータ31は、通電により駆動力を発生させる。動力伝達機構40は、モータ31の駆動力をペダルレバー20に伝達してペダルレバー20の踏込方向と反対方向の力である反力を付加可能である。制御部60は、ペダルレバー20の回転角度であるペダル角度θapを演算する角度演算部、および、ペダル角度θapがペダル開度閾値Athに到達した場合、モータ31を制御しペダルレバー20に付加する付加反力が反力目標値Fr
*
となるように制御する反力制御部を有する。反力制御部は、ペダルレバー20の踏込速度Vapに応じ、反力目標値Fr
*
に到達するまでの反力増加速度Vfrを変更する。
【選択図】 図1
特許請求の範囲
【請求項1】
踏み込みに応じて動作可能であるペダルレバー(20)と、
通電により駆動力を発生させる反力駆動源(31)と、
前記反力駆動源の駆動力を前記ペダルレバーに伝達して前記ペダルレバーの踏込方向と反対方向の力である反力を付加可能な動力伝達機構(40)と、
前記ペダルレバーの回転角度であるペダル開度を演算するペダル開度演算部(61)、および、前記ペダル開度がペダル開度閾値に到達した場合、前記ペダルレバーに付加する付加反力が反力目標値となるよう前記反力駆動源を制御する反力制御部(65)を有する制御部(60)と、
を備え、
前記反力制御部は、前記ペダルレバーの踏込速度に応じ、前記反力目標値に到達するまでの反力増加速度を変更するアクセル装置。
続きを表示(約 640 文字)
【請求項2】
前記反力制御部は、前記踏込速度に応じた値である踏力増加速度よりも前記反力増加速度が大きくなるように前記反力駆動源を制御する請求項1に記載のアクセル装置。
【請求項3】
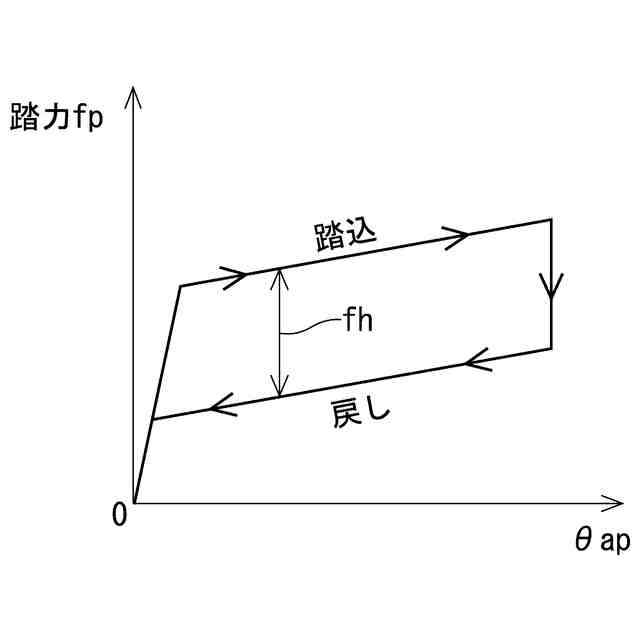
前記ペダルレバーは、踏込動作時と戻し動作時とで踏力が異なるヒステリシス特性を有しており、
前記反力目標値は、踏込動作時の踏力と戻し動作時の踏力との差である保持踏力以下である請求項1または2に記載のアクセル装置。
【請求項4】
前記反力制御部は、前記踏込速度が反力付加範囲の上限値より大きい場合、前記ペダル開度が前記ペダル開度閾値に到達しても、反力付加を行っていない状態を継続する請求項1に記載のアクセル装置。
【請求項5】
走行用モータの駆動力で走行するEV走行と、内燃機関の駆動力で走行するエンジン走行とを切替可能な車両に搭載されており、
前記ペダル開度閾値は、前記EV走行から前記エンジン走行に切り替わる前記ペダル開度に応じて設定されている請求項1に記載のアクセル装置。
【請求項6】
前記ペダル開度閾値は、燃料消費率が相対的に小さい運転領域から相対的に大きい運転領域に切り替わる前記ペダル開度に応じて設定されている請求項1に記載のアクセル装置。
【請求項7】
前記ペダル開度閾値は、搭載されている車両の走行位置の法定速度に対応する前記ペダル開度に応じて設定されている請求項1に記載のアクセル装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクセル装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、車両のアクセルペダルの踏力を制御するアクセルペダル踏力制御装置が知られている。例えば特許文献1では、アクセルペダルの踏力をベース踏力よりも増加させる際に、初回の踏力の増加割合を2回目の踏力の増加割合よりも小さく設定している。
【先行技術文献】
【特許文献】
【0003】
特許第5316339号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、1段階目の付加反力の増加割合を緩やかにしているため、付与される反力よりも踏力の増加が大きい場合、ペダル位置を保持できず、踏み増してしまう。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、反力を適切に付加可能なアクセル装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明のアクセル装置は、ペダルレバー(20)と、反力駆動源(31)と、動力伝達機構(40)と、制御部(60)と、を備える。ペダルレバーは、踏み込みに応じて動作可能である。反力駆動源は、通電により駆動力を発生させる。動力伝達機構は、反力駆動源の駆動力をペダルレバーに伝達してペダルレバーの踏込方向と反対方向の力である反力を付加可能である。
【0007】
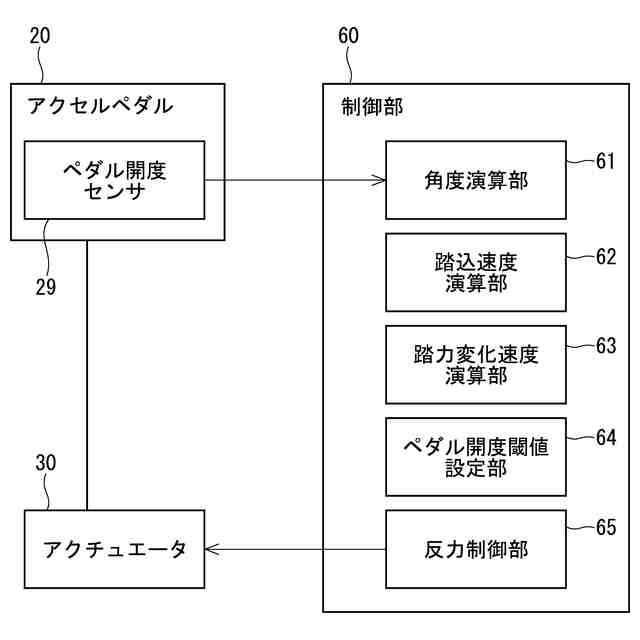
制御部は、ペダルレバーの回転角度であるペダル開度を演算するペダル開度演算部(61)、および、ペダル開度がペダル開度閾値に到達した場合、ペダルレバーに付加する付加反力が反力目標値となるように反力駆動源を制御する反力制御部(65)を有する。反力制御部は、ペダルレバーの踏込速度に応じ、反力目標値に到達するまでの反力増加速度を変更する。これにより、ペダルレバーに適切に反力を付加することができる。
【図面の簡単な説明】
【0008】
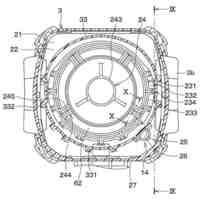
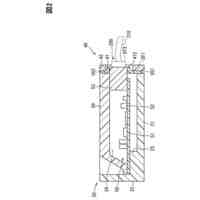
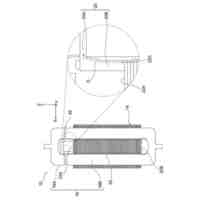
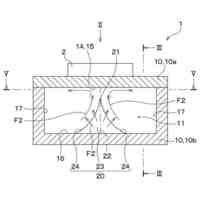
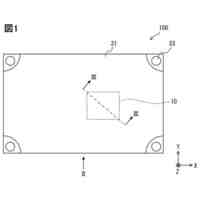
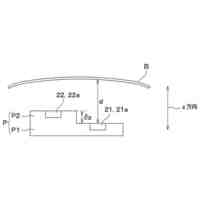
一実施形態によるアクセル装置を示す模式図である。
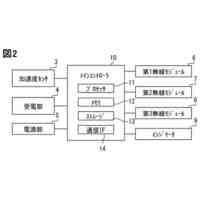
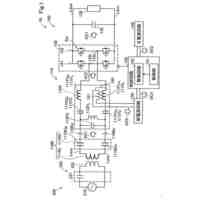
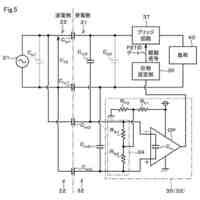
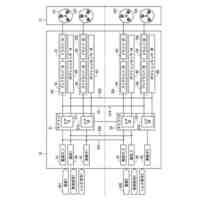
一実施形態による制御部を示すブロック図である。
一実施形態による反力付与を行わない場合の踏力特性を示す特性図である。
一実施形態による反力付与を行う場合の踏力特性を示す特性図である。
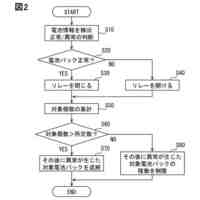
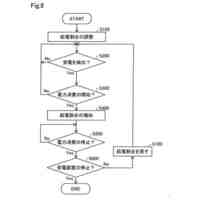
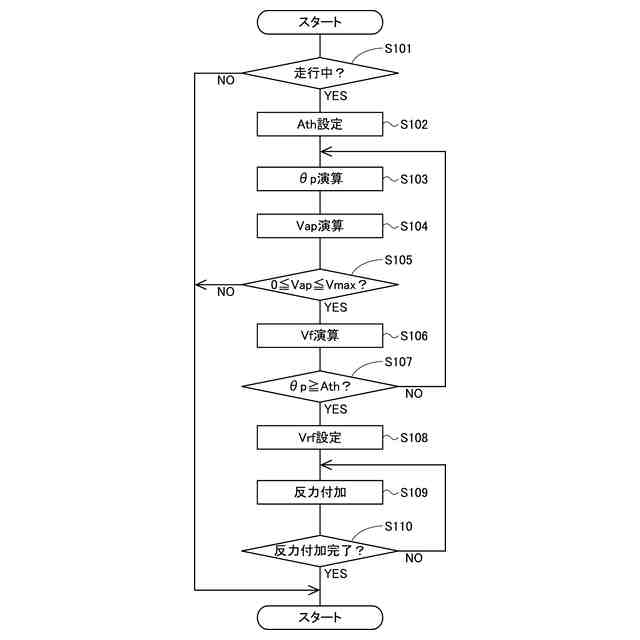
一実施形態による反力制御処理を説明するフローチャートである。
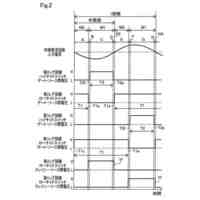
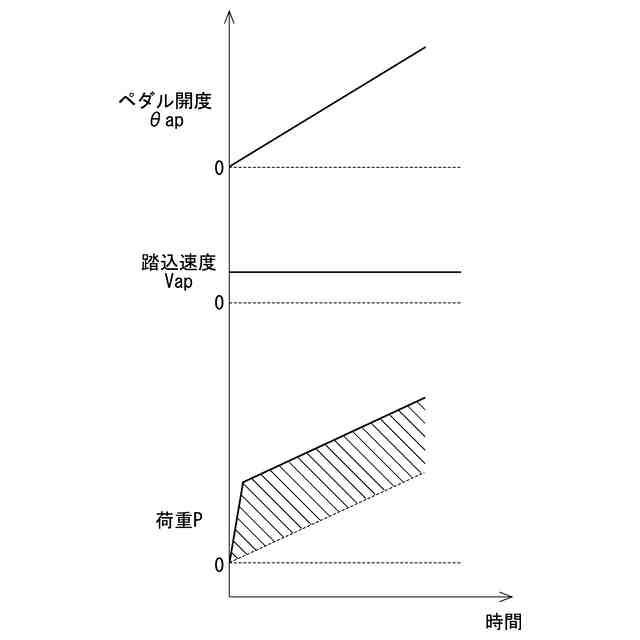
一実施形態による反力付与を行わない場合のタイムチャートである。
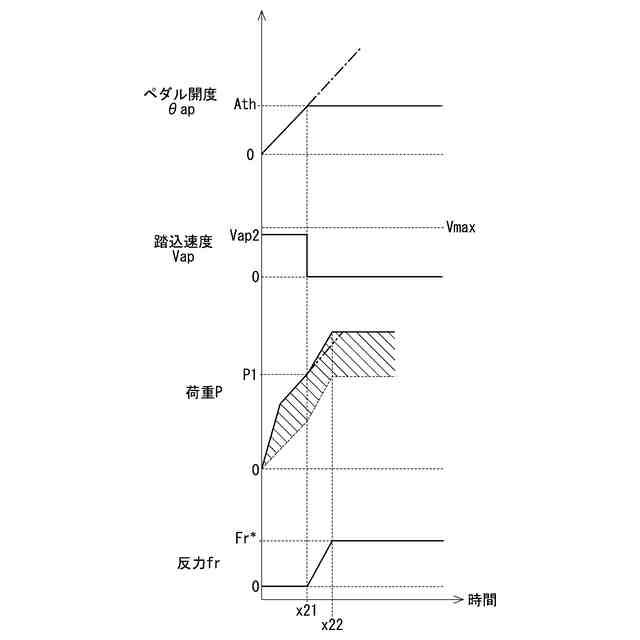
一実施形態において、踏込速度が比較的小さい場合の反力制御を示すタイムチャートである。
一実施形態において、踏込速度が比較的大きい場合の反力制御を示すタイムチャートである。
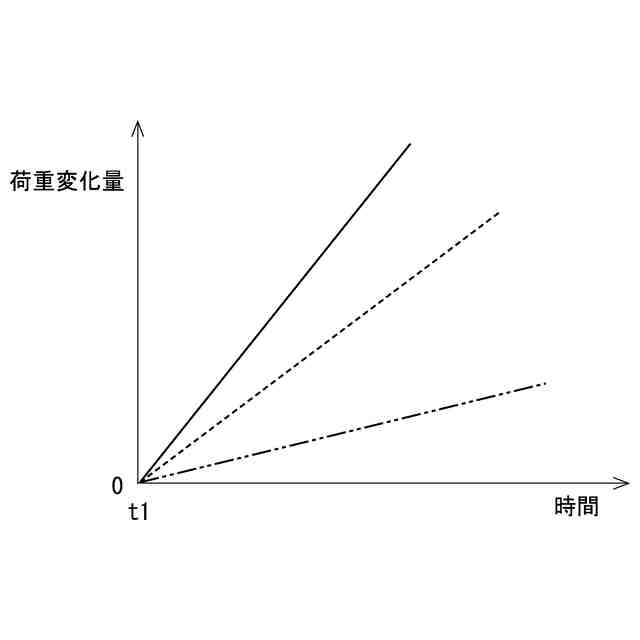
一実施形態における荷重変化量を示す説明図である。
一実施形態において、踏込速度が上限値より大きい場合の反力制御を示すタイムチャートである。
付加反力が保持踏力より大きい場合の踏力特性を示す特性図である。
付加反力が保持踏力より大きい場合の反力制御を示すタイムチャートである。
【発明を実施するための形態】
【0009】
(一実施形態)
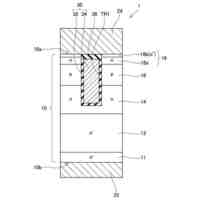
以下、本発明によるアクセル装置を図面に基づいて説明する。一実施形態によるアクセル装置を図1~図10に示す。図1に示すように、アクセル装置1は、ペダルレバー20、モータ31、動力伝達機構40、および、ECU50等を備え、図示しない車両に搭載されている。アクセル装置1が搭載される車両は、走行の駆動源としてエンジンおよびバッテリを用いる所謂ハイブリッド車であるが、ガソリン車、プラグインハイブリッド車または電気自動車等であってもよい。
【0010】
ペダルレバー20は、パッド21、アーム23、および、ペダル25を有し、ドライバの踏込操作等により一体に駆動される。パッド21は、ドライバにより踏込操作可能に設けられる。パッド21は、ハウジングHに設けられる支点部材22により回転可能に支持される。図1では、パッド21がハウジングHの一面に沿う方向に延びて設けられる、いわゆる床置き型(オルガン型)を示しているが、吊り下げ型(ペンダント型)であってもよい。本実施形態では、ペダルハウジングやモータハウジング等、モータ31の駆動およびペダルレバー20の踏込操作等により駆動されない筐体部分を、まとめて「ハウジングH」とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
発音器
1か月前
株式会社デンソー
携帯機
8日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電源装置
25日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電子装置
12日前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
通信装置
15日前
株式会社デンソー
光学部材
15日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
圧電素子
10日前
株式会社デンソーウェーブ
携帯端末
3日前
株式会社デンソー
冷却装置
1か月前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
電子機器
8日前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
ステータ
1日前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
電子装置
1日前
株式会社デンソー
受電装置
22日前
株式会社デンソー
駆動装置
22日前
株式会社デンソー
撮像装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
駆動装置
11日前
株式会社デンソー
駆動装置
11日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
センサ装置
19日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
4日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ