TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121282
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016639
出願日
2024-02-06
発明の名称
制御装置、制御方法、及びプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
B60W
50/00 20060101AFI20250812BHJP(車両一般)
要約
【課題】入力情報のノイズや欠損による影響を抑制しながら遅れの少ない制御を実現できる制御装置を提供すること。
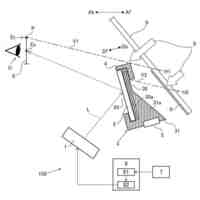
【解決手段】車両制御装置1は、入力情報の時系列データに基づいて制御対象に定められた制御量に対する目標制御量を算出する目標制御量算出部11を備える。目標制御量算出部11は、現在時刻から所定時間前までの間のM点(Mは、2以上の整数)の異なる時刻における入力情報を取得する入力情報取得部2と、入力情報に基づいて予測制御量を算出する制御量予測器3
0
,…,3
M-1
と、これら制御量予測器によって算出されるM個の予測制御量の加重平均値を目標制御量として算出する加重平均算出器4と、を備える。i番目(iは、0からM-1の間の整数)の制御量予測器3
i
は、現在時刻から予測時間τ
i
前における入力情報と現在時刻における制御量とを関連付ける制御量予測モデルを用いることによって予測制御量を算出する。
【選択図】図2
特許請求の範囲
【請求項1】
制御対象に定められた制御量に対する目標制御量を入力情報に基づいて算出し、当該目標制御量に基づいて前記制御対象を操作する制御装置であって、
前記入力情報の時系列データに基づいて前記目標制御量を算出する目標制御量算出手段と、
前記目標制御量に基づいて前記制御対象を操作する自動操作手段と、を備え、
前記目標制御量算出手段は、
現在時刻から所定時間前までの間のM点(Mは、2以上の整数)の異なる時刻における前記入力情報を取得する入力情報取得手段と、
前記入力情報取得手段によって取得された前記入力情報に基づいて予測制御量を算出するM個の制御量予測手段と、
M個の前記制御量予測手段によって算出されるM個の前記予測制御量の加重平均値を前記目標制御量として算出する加重平均算出手段と、を備え、
i番目(iは、0からM-1の間の整数)の前記制御量予測手段は、前記現在時刻からi時間前における前記入力情報と前記現在時刻における前記制御量とを関連付ける制御量予測モデルを用いることによって前記予測制御量を算出することを特徴とする制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記制御量予測モデルは、前記入力情報の時系列データである入力サンプルデータ及び当該入力サンプルデータに対する理想制御量の時系列データである理想出力データを教師データとした機械学習によって構築されたものであることを特徴とする請求項1に記載の制御装置。
【請求項3】
i番目の前記制御量予測モデルは、前記入力サンプルデータ及び当該入力サンプルデータに対し時刻をi時間進ませた前記理想出力データをセットとした前記教師データによって構築されたものであることを特徴とする請求項2に記載の制御装置。
【請求項4】
前記加重平均算出手段は、i番目の前記制御量予測手段によって算出される前記予測制御量に対するi番目の重みを、j番目(jは、iより大きな整数)の前記制御量予測手段によって算出される前記予測制御量に対するj番目の前記重みより大きな値に設定することを特徴とする請求項1から3の何れかに記載の制御装置。
【請求項5】
前記加重平均算出手段は、値k(kは、0からM-1の間の整数)に対し指数関数的に減少するようにk番目の前記重みの値を設定することを特徴とする請求項4に記載の制御装置。
【請求項6】
前記目標制御量算出手段は、前記現在時刻からi時間前における前記入力情報の信頼度を取得する信頼度取得手段をさらに備え、
前記加重平均算出手段は、前記信頼度取得手段によって取得されたi番目の前記信頼度に基づいてi番目の前記重みの値を設定することを特徴とする請求項5に記載の制御装置。
【請求項7】
前記制御対象は、車両の操舵機構であり、
前記制御量は、前記操舵機構による操舵角であり、
前記入力情報は、前記車両の周囲に関する外界情報を含むことを特徴とする請求項1に記載の制御装置。
【請求項8】
前記制御対象は、車両の走行駆動装置であり、
前記制御量は、前記走行駆動装置による走行駆動力であり、
前記入力情報は、前記車両の周囲に関する外界情報を含むことを特徴とする請求項1に記載の制御装置。
【請求項9】
前記制御対象は、車両の制動装置であり、
前記制御量は、前記制動装置による制動力であり、
前記入力情報は、前記車両の周囲に関する外界情報を含むことを特徴とする請求項1に記載の制御装置。
【請求項10】
前記車両の運転者を前記制御対象の操作主体とする手動運転時における前記制御量及び前記入力情報の時系列データに基づいて前記制御量予測モデルを学習する学習手段をさらに備えることを特徴とする請求項7から9の何れかに記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、及びプログラムに関する。より詳しくは、制御対象に定められた制御量を制御する制御装置、制御方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて自動運転技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
【0003】
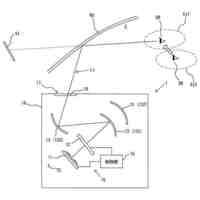
例えば特許文献1には、運転者による操舵操作によらず、制御装置が自動で操舵角を自動で制御する自動運転技術が記載されている。特許文献1に記載の制御装置は、車両の現在地点と目標経路上に定められた目標地点とを通る円弧上に沿って車両を走行させるように車両の操舵角に対する目標操舵角を決定する。
【先行技術文献】
【特許文献】
【0004】
特開2021-126925号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで多くの自動運転技術では、制御量に対する目標制御量(特許文献1の例では、目標操舵角)を、車両に搭載されたカメラやレーダ等の外界センサ等によって取得された情報に基づいて算出する。しかしながらこのような外界センサによって取得される情報には観測ノイズや欠損があることから、目標制御量が外界センサのノイズや欠損による影響を受けて振動してしまう場合がある。
【0006】
またこのような目標制御量の振動を平滑化する手法として、FIRフィルタが公知であるが、FIRフィルタを適用すると平滑化を実現することができるものの、遅れも生じてしまう(後述の図4参照)。
【0007】
本発明は、入力情報のノイズや欠損による影響を抑制しながら遅れの少ない制御を実現できる制御装置、制御方法、及びプログラムを提供することを目的とし、ひいては持続可能な輸送システムの発展に寄与することを目的とする。
【課題を解決するための手段】
【0008】
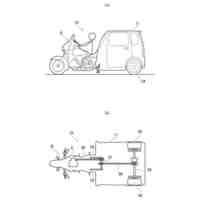
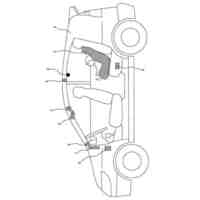
(1)本発明に係る制御装置(例えば、後述の車両制御装置1,1A,1B)は、制御対象(例えば、後述の制動装置7、パワープラント8、及び電動パワーステアリング装置9)に定められた制御量に対する目標制御量を入力情報に基づいて算出し、当該目標制御量に基づいて前記制御対象を操作するものであって、前記入力情報の時系列データに基づいて前記目標制御量を算出する目標制御量算出手段(例えば、後述の目標制御量算出部11,11A,11B)と、前記目標制御量に基づいて前記制御対象を操作する自動操作手段(例えば、後述のモータ駆動部12)と、を備え、前記目標制御量算出手段は、現在時刻から所定時間前までの間のM点(Mは、2以上の整数)の異なる時刻における前記入力情報を取得する入力情報取得手段(例えば、後述の入力情報取得部2)と、前記入力情報取得手段によって取得された前記入力情報に基づいて予測制御量を算出するM個の制御量予測手段(例えば、後述の制御量予測器3
0
,3
1
,…,3
M-1
)と、M個の前記制御量予測手段によって算出されるM個の前記予測制御量の加重平均値を前記目標制御量として算出する加重平均算出手段(例えば、後述の加重平均算出器4,4A)と、を備え、i番目(iは、0からM-1の間の整数)の前記制御量予測手段は、前記現在時刻からi時間前における前記入力情報と前記現在時刻における前記制御量とを関連付ける制御量予測モデルを用いることによって前記予測制御量を算出することを特徴とする。
【0009】
(2)この場合、前記制御量予測モデルは、前記入力情報の時系列データである入力サンプルデータ及び当該入力サンプルデータに対する理想制御量の時系列データである理想出力データを教師データとした機械学習によって構築されたものであることが好ましい。
【0010】
(3)この場合、i番目の前記制御量予測モデルは、前記入力サンプルデータ及び当該入力サンプルデータに対し時刻をi時間進ませた前記理想出力データをセットとした前記教師データによって構築されたものであることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
24日前
個人
車窓用防虫網戸
3か月前
個人
ホイルのボルト締結
1か月前
個人
車輪清掃装置
2か月前
個人
ルーフ付きトライク
15日前
日本精機株式会社
表示装置
22日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
22日前
個人
車両通過構造物
25日前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
22日前
個人
車両用スリップ防止装置
1か月前
個人
乗合路線バスの客室装置
1か月前
個人
アクセルのソフトウェア
1か月前
個人
ワイパーゴム性能保持具
3か月前
個人
キャンピングトレーラー
2か月前
日本精機株式会社
車載表示装置
1か月前
株式会社ニフコ
照明装置
3日前
個人
車載小物入れ兼雨傘収納具
1か月前
井関農機株式会社
収穫作業車両
3か月前
個人
音声ガイド、音声サービス
1か月前
株式会社豊田自動織機
産業車両
19日前
株式会社ニフコ
保持装置
1か月前
個人
円湾曲ホイール及び球体輪
1か月前
株式会社クラベ
ヒータユニット
3か月前
日本精機株式会社
車両用表示装置
3か月前
井関農機株式会社
作業車両
3か月前
株式会社ユーシン
照明装置
3か月前
日本無線株式会社
取付金具
1か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
2か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ